耙吸挖泥船全自动抛泥控制技术
2018-11-21杨舒何彦行
杨舒,何彦行
(1.中交疏浚(集团)股份有限公司,北京 100088;2.中交疏浚技术装备国家工程研究中心有限公司,上海 201208)
0 引言
随着国家大力支持码头及航运建设,耙吸挖泥船以其自航、自挖、自载及自卸的优点在工程施工中占据着重要的地位[1]。随着自动控制技术的发展,人们对于耙吸挖泥船的性能、效率、自动化水平、环保等级要求越来越高,传统的集成控制虽已实现耙吸挖泥船设备控制的高度集成[2],但无法实现耙吸挖泥船施工过程的全自动控制,进而无法提高性能和效率。本文在综合分析耙吸挖泥船全自动控制需求的基础上,重点研究耙吸挖泥船全自动抛泥控制技术,将先进的自动控制理念引入其中,设计耙吸挖泥船全自动抛泥作业流程及过程控制器。
1 全自动抛泥控制需求
耙吸挖泥船抛泥作业分为正常抛泥和浅水抛泥2种形式,根据疏浚土质情况及航行状态选择冲舱、压舱、抽舱流程[3]。传统的集成控制需要施工员进行复杂的控制组合方能完成,过多的人工操作使得人员疲劳、施工效率降低,而且由于人为操作的局限性使得控制精度降低[4],甚至因人为操作失误而产生安全隐患。针对以上耙吸挖泥船抛泥作业流程中存在的问题,提出以下自动控制技术:将耙吸挖泥船抛泥作业流程细化为多个阶段,分阶段进行流程设计;在此基础上将多个阶段整合,采用“一键操作”的全自动抛泥控制设计理念,实现耙吸挖泥船抛泥作业的全自动控制。
2 宏按钮及参数配置
2.1 宏按钮及其功能
“一键操作”设计理念通过“宏按钮”设置实现,每个“宏按钮”代表1个操作流程。抛泥作业流程内所有的“宏按钮”均以软件按钮的形式在配置的触摸屏(HMI)中呈现。满足执行条件时操作“宏按钮”,相关联的抛泥作业程序自动执行。全自动抛泥控制“宏按钮”设置如图1所示。
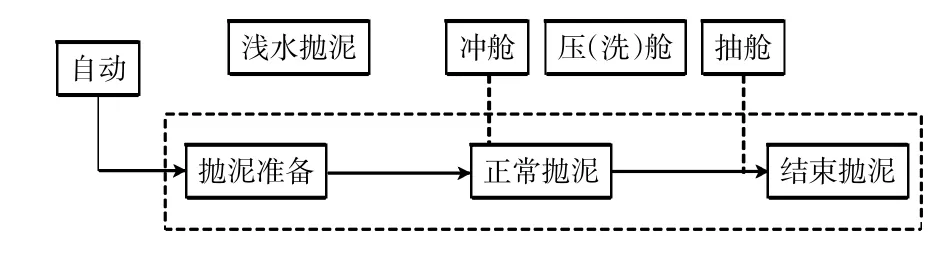
图1 全自动抛泥宏按钮Fig.1 Automatic mud-dumping button
2.2 抛泥作业参数配置
耙吸挖泥船抛泥作业流程具有可变性[5],当前船次的疏浚土质情况及航行状态会对抛泥作业流程产生影响,因此在抛泥作业开始前需对抛泥作业进行参数配置,以确保全自动抛泥过程安全、高效实现。全自动抛泥作业流程参数配置如图2所示。

图2 全自动抛泥流程参数配置Fig.2 The parameter collocation of automatic muddumping process
1)土质设定
土质设定包含淤泥、黏土、粉土和砂土4种土质。土质设定将会影响全自动抛泥流程中冲舱功能是否启用,土质选择与冲舱功能选择关系如表1所示。

表1 土质选择与冲舱功能投入之间的关系Table 1 The relation between the soil selection and the function of hopper flushing
2)抛泥区域限制功能
将耙吸挖泥船疏浚轨迹及剖面显示系统(DTPM)中抛泥区域边界引入到全自动抛泥流程中,作为抛泥流程自动执行的充分必要条件,抛泥区域的引入对流程中“宏按钮”操作影响如表2所示。

表2 抛泥区域功能启用后在区域外的动作限制Table 2 The limited action outside the area after starting the function in mud-dumping area
3)抛泥前高压冲水稀释
通过配置该选择项在抛泥前对泥舱装载物进行高压冲水稀释;同时该选择项功能是否启用又与上述土质参数配置相关。土质为淤泥的情况下该功能自动停用。
4)航速上限及滤波时间
耙吸挖泥船在一定的航速范围内才允许执行全自动抛泥作业,当航速超过设定航速上限值的持续时间大于“航速上限滤波时间”设定值时,全自动抛泥作业被禁止。但正在执行的全自动抛泥作业不会因此停止。
5)水深下限及泥门总长
耙吸挖泥船抛泥分为正常抛泥和浅水抛泥2种方式,抛泥方式的不同影响着泥门开启方式。根据水深下限、泥门总长、富裕水深三者之间的关系,抛泥作业执行前全自动程序会选择合适的抛泥方式:当富裕水深大于泥门总长及水深下限之和时为正常抛泥方式;当富裕水深小于两者之和时为浅水抛泥方式。
3 全自动抛泥控制器设计
耙吸挖泥船控制系统是由多个子控制器组成,控制器是实现疏浚作业控制的核心部分,是整个疏浚过程控制的大脑[6]。全自动抛泥过程子控制器是对手动抛泥过程子控制器进行改进优化设计,全自动抛泥过程包括疏浚管系闸阀自动设置(ADSS)、自动泥门设置(ABMC)、高压冲水自动控制(AJC)、自动装载吃水控制(ALDC)、自动泥泵控制(APC)5个子控制器。全自动抛泥过程还需调用功率管理(PMS)、动态定位/动态跟踪(DP/DT)2个子系统。子控制器及系统在全自动抛泥流程中调用关系如图3所示。

图3 子控制器及系统的调用Fig.3 The transfer of the sub-controller and system
1)疏浚管系闸阀自动设置控制器(ADSS)
全自动抛泥作业流程开始前,自动控制器会根据抛泥流程要求,自动将疏浚闸阀预置到所需工作状态,抛泥流程结束后自动将疏浚管系闸阀恢复到航行模式。
2)自动泥门设置控制器(ABMC)
控制器根据抛泥作业参数中配置的水深下限及泥门行程总长并结合当前富裕水深,自动判断当前抛泥区域的最佳抛泥方式,进而给出建议的泥门动作流程,用户可以在抛泥过程中接受控制器给出的动作建议,也可以根据需要变更选项。
3)高压冲水自动控制器(AJC)
根据疏浚土质类型的设定,程序将监控土质数值的变化,在土质发生变化后的前几船次抛泥过程中,程序会在合理区间内多次调整高压冲水控制器参数,并记录不同的结果数据,以寻求相对优化的全自动抛泥设置,提高抛泥的效率。
4)自动装载吃水控制器(ALDC)
自动装载吃水控制器主要作用于全自动抛泥动作执行阶段和抽舱动作,在上述两个动作执行过程中,ALDC将向其传递装载量及吃水等参数,优化抛泥作业流程及抽舱过程的自动操作,合理优化控制可减少执行时间,提高抛泥过程的效率。
5)自动泥泵控制器(APC)
APC主要应用于抽舱过程,抽舱过程中的数据实时传递至APC,控制泥泵将舱内余水清理干净。
4 全自动抛泥流程设计
4.1 流程总体设计
耙吸挖泥船抛泥作业流程复杂多变,抛泥过程中需要控制的设备较多,为安全有效地实现抛泥作业全自动控制,将全自动抛泥流程划分为多个阶段,分阶段进行自动控制。在每个阶段自动控制完成的基础上将其整合,实现抛泥作业流程的全自动控制。
全自动抛泥流程可分为5个子流程,分别为条件判断子流程、程序初始化子流程、动作执行子流程、程序退出子流程和报警处理子流程。全自动抛泥执行流程如图4所示。

图4 全自动抛泥执行流程Fig.4 The executive process of automatic mud-dumping
4.2 条件判断子流程
条件判断子流程依次判定全自动抛泥执行所需要的启动条件,在程序开始前对程序开始所需要具备的条件进行判断,判断的结果可以通过观察HMI中的“宏按钮”状态来判断流程需要的条件是否满足。当条件满足时“宏按钮”边框绿色定光并常亮,当条件未完全满足时“宏按钮”边框红色定光并常亮。
4.3 初始化(准备)子流程
初始化(准备)子流程主要为液压泵和高压冲水泵两个部分。
1)液压泵
液压初始化子流程主要完成相应液压泵的启动,液压泵的启动需按照一定的顺序进行。顺序启动过程中,如有一台液压泵突然停止或启动超时,则顺序启动失败,已经启动完成的液压泵也会全部停止工作,并伴随报警;如无异常情况出现,待液压泵全部启动完成后,液压初始化子流程完成。
2)高压冲水泵
全自动抛泥流程参数配置(见图2)中选择“抛泥前高压冲水稀释”功能时,初始化子程序执行高压冲水泵初始化程序,主要完成碟阀开关控制、冲水管系预置及高压冲水泵启动。
高压冲水泵初始化程序首先打开相应蝶阀,将冲水管系预置为“左/右高压冲水泵并联向泥舱冲水”模式,模式预置完成后,启动高压冲水泵变频器,待变频器运行反馈正常时,高压冲水泵初始化程序完成。初始化过程中出现模式预置失败或变频器运行反馈异常情况时,初始化过程失败,并伴随报警。
4.4 动作执行子流程
条件判断子流程及初始化(准备)子流程执行完成且无异常情况下,全自动抛泥作业进入动作执行子流程,开始抛泥作业。以“正常抛泥”作业为例,具体执行流程如图5所示。

图5 全自动抛泥作业动作执行流程Fig.5 The executive process of automatic mud-dumping task
4.5 程序退出子流程
程序退出子流程可视作初始化子流程的逆流程。全自动抛泥作业完成后的正常退出或遇故障报警后的非正常退出之后,将设备状态恢复到航行状态,包括以下步骤:
1)全自动抛泥作业中涉及到的液压泵,在程序退出子流程执行结束后均处于关闭状态;
2)疏浚闸阀管系预置为航行模式,即所有闸阀均关闭;
3)高压冲水蝶阀预置为航行模式,所有蝶阀均关闭。
4.6 报警处理子流程
报警处理子流程功能是为以上4个子流程在执行过程中出现异常时自动记录并提醒,是全自动抛泥作业流程安全执行的“守护者”。全自动抛泥作业流程中的报警主要为以下3类:1)模式预置失败类;2)启动失败或超时类;3)动作超时、异常及传感器故障类。
5 实船应用
全自动抛泥控制已成功应用至实船,截取实船在相同疏浚工况下的全自动抛泥及手动抛泥数据如图6所示。

图6 相同工况下泥舱液位变化Fig.6 The change of mud holder's level in the same workcondition
图6 中比较了在相同时间段内,全自动抛泥及手动抛泥两种情况下,泥舱液位的变化,采样时间为2 s。
由图6可知,在全自动抛泥情况下,泥舱液位下降速度更快,抛泥效率更高。
6 结语
通过对耙吸挖泥船抛泥过程自动控制需求的分析,设计了耙吸挖吸船全自动抛泥作业流程及过程控制器,实现了全自动抛泥控制,耙吸挖泥船全自动控制技术不但实现了耙吸挖泥船抛泥作业的“一键操作”,而且实船应用数据表明全自动抛泥控制具有更高的效率,提高了抛泥作业的安全性及智能化水平。