推进轴系纵向振动主动控制技术综述
2018-11-20黄志伟
黄志伟
(中国舰船研究设计中心,湖北 武汉 430064)
0 引 言
舰船性能的先进性以及战斗使命的完成度,在很大程度上取决于其声隐身性能[1]。为此,世界海军强国均在不遗余力地开展舰船声隐身性能研究。由螺旋桨激励、推进轴系传递而引起的艇体振动问题,是产生舰船水下声辐射、特别是低频声辐射的重要原因[2]。理论上,通过改进舰船线型来改善尾部伴流场及改进螺旋桨设计以减小激振力,是提高舰船声隐身性能的根本途径,但舰船尾部伴流场和螺旋桨激励特性极其复杂,即使七叶大侧斜螺旋桨,其激励力仍然不小,主要形成以10~200 Hz范围内低频宽带为主的艇体声辐射[3],目前主要依靠经验和试验来逐步改善螺旋桨激励特性。另一方面,通过优化艇体结构来避免系统共振也存在许多困难[4]。推进轴系是螺旋桨工作时引起的激振力向艇体传播的主要途径。因此,从振动传递路径上入手来解决该问题较为现实可行。
推进轴系纵向振动除对轴系自身产生影响外,还通过各轴承基座将螺旋桨脉动力传递至艇体,从而引起艇体振动声辐射[5 - 6]。轴系纵向振动控制的目的是减小轴系纵向振动向艇体的传递,避免引发艇体结构产生声辐射,但具有一定的难度:一方面要绝对保证推进轴系的基本功能;另一方面要保障推进轴系的抗冲击性能。现有推进轴系设计以功能为主,结构修改的余地较小,难以通过优化设计进行减隔振,研究的重点仍是在轴系上安装一些振动控制装置。被动控制装置虽然简单可靠,但不能随外界激励自适应变化,难以应用于宽带扰动的抑制,且其控制效果也极其有限。主动控制技术由于具有适应性强、控制效果好等潜在的优越性,成为轴系振动控制一条重要的新途径。国外在主动控制技术方面研究较早,针对舰船推进轴系纵向振动主动控制技术,TRINDADE[7 - 8],DALEY[9],CARESTA[10]等开展了大量的理论和试验研究工作,取得了许多有益的成果;而我国在推进轴系振动主动控制方面的研究还处于起步阶段。
为此,本文总结国内外舰船推进轴系纵向振动控制方案及建模方法,概述轴系纵向振动主动控制策略及自适应算法,给出轴系纵向振动主动控制试验的示例验证情况,并结合现有研究成果对推进轴系纵向振动主动控制技术后续重点研究方向提出一些建议。
1 推进轴系纵向振动控制研究现状
1.1 国外研究现状
推进轴系纵向振动控制问题研究在国外起步较早,现在大量相关的研究工作仍在进行。20世纪40年代,根据大量舰船航行试验,美国海军明确主推进轴系纵向振动是造成主推进轴系过早失效的主要原因,并经过系统的理论分析和试验研究提出了一些主推进轴系纵向减振的措施[11]。20世纪60年代,GOODWIN[12]率先将共振转换器(见图1)应用到舰船轴系纵向振动控制中,并研究了共振转换器对轴系振动的影响。Michell轴承公司在上述研究的基础上,研制了轴系共振调节器,加装在推力轴承内部,后来成为英国和美国海军舰船的标准配置[4]。
1989 年,美国 LEWIS 等[13 - 14]提出了一种轴系纵向振动主动控制方法,即在原有推力轴承基础上并联1个辅助磁推力轴承,通过闭环反馈控制对磁推力轴承进行实时调节,有效衰减了螺旋桨动态力向艇体的传递,但导致轴系振动有所增大,其减振效果有限。1990年BAZ等[15]研究了基于气动伺服控制的轴系纵向振动主动控制技术,实验结果表明气动伺服作动器在低频段的控制效果明显。2002年PAN等[16]在简单的桨轴系统试验平台上,研究了通过主动作动器控制推力轴承油膜刚度可以减小螺旋桨引起的结构振动,但轴承刚度具有时变特性,控制较为复杂。JOHNSON[17]设计出一种与推进轴系并联的电磁式主动控制装置,采用惯性质量块作为作动元件,低频减振效果显著,且对推进轴系影响较小。

图1 共振转换器原理示意图及其在轴系上的安装位置Fig.1 The principle and installation position of a resonant changer on the shaft
2000年以后,澳大利亚新南威尔士大学DYLEJKO等[18 - 19]和 MERZ 等[20 - 21]在 GOODWIN 的基础上研究了在桨轴系统-艇体耦合振动中共振转换器参数优化设计的问题,如图2所示。前者分析了不同参数对艇体共振和声辐射的影响规律,获得了共振转换器的设计参数。后者研究了共振转换器与分布式主动吸振器组成的主被动混合控制系统对轴系振动与艇体声辐射的影响。通过对含有共振转换器的主被动控制系统的减振效果进行对比分析,结果表明艇体100 Hz频率以内的辐射噪声得到了明显抑制。

图2 推力轴承基础的分布式主动吸振Fig.2 Distributed active vibration absorption on a thrust bearing foundation
2008年,在欧洲海事技术大会上,英国宇航公司提供了螺旋桨轴系艇体振动主动控制技术的宣传海报,如图3所示该控制方案为主动控制装置作用于推力轴承基座上。由此可见,螺旋桨-轴系-艇体耦合纵向振动主动控制技术在国外已经受到重视,而且很可能已经应用于实艇。

图3 螺旋桨-轴系-艇体耦合振动主动控制示意图Fig.3 Active control principle of vibration of the propeller-shafting-hull
1.2 国内研究现状
螺旋桨-轴系-艇体振动声辐射及控制问题最近几年在国内受到广泛关注。20世纪90年代初,国内学者在计算艇体低频弯曲振动方面进行了一些理论研究工作,但未系统深入研究螺旋桨激励艇体动力响应问题及其引起的水下声辐射。近年来,舰船科研单位在这方面开展了大量工作,结合国内外相关资料以及工程实际中遇到的轴系振动问题,研究了螺旋桨-轴系-艇体耦合振动及声辐射计算方法,在轴系振动传递机理、控制措施等方面取得了一些进展[22 - 24]。
国内许多高校也开展了有源噪声和振动控制的研究。曹贻鹏[25]研究了基于动力吸振器的轴系纵向振动控制,结果表明吸振器分布式设计可拓宽吸振带宽,且能大幅衰减轴系纵向振动及艇体声辐射。刘耀宗[26]建立了带有动力吸振器的推进轴系纵向振动力学模型,研究结果表明动力吸振器仅能有效抑制轴系共振频率附近的频段峰值,其他频段吸振效果有限。王家盛[27]设计了一种离心式动力吸振装置用于轴系纵向振动控制,试验结果表明该装置具有较好的减振效果,但自动调节能力有限。李良伟[28]采用优化算法对动力减振器参数进行优化,研究了各参数对推进轴系纵向振动的影响。李攀硕[29]采用电磁作动器对轴系纵向振动进行了自适应前馈控制,结果表明在螺旋桨转速不变的情况下获得较好的控制效果。杨志荣[30]和李清云[31]均设计了一种磁流变弹性体的动力吸振器,实现了振动能量在推进轴系上发生转移,试验表明整体吸振-性能比被动式动力吸振器具有明显的优势。殷永康[32]将改进的拟稳态控制算法应用于船舶轴系纵振的研究,计算结果表明,吸振器的刚度连续变化时,磁流变式半主动动力吸振器将获得更好的效果。孟浩[33]运用声子晶体局域共振带隙的原理,提出了一种在轴系上加装多个局域振子的方案,研究了该方案的减振效果及对轴系振动的影响。张志谊和胡芳等[34 - 36]提出了一种基于电磁惯性式的轴系纵向振动主动控制技术方案,建立螺旋桨-轴系振动传递主动控制实验系统(见图4),验证了主动控制策略和自适应算法,实验结果表明该控制方案能有效抑制转速调制的周期干扰,为轴系振动主动控制技术工程应用提供了理论指导。
综上所述,在舰船推进轴系纵向振动控制相关技术方面的研究,国外已取得大量的研究成果,特别是美国和澳大利亚,提出了许多具有工程实践的技术方案,且某些技术已被成功应用。相对而言,国内的轴系纵向振动主动控制技术研究起步较晚,总体上仍处于理论分析与模型试验阶段。
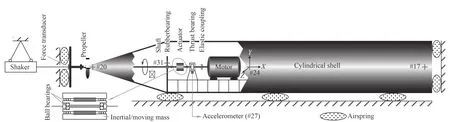
图4 轴系纵向振动主动控制试验模型Fig.4 Experimental model for active control of longitudinal vibration of the shafting
1.3 主要差距分析
国内外在潜艇轴系振动主动控制方面的差距主要体现在3个方面:
1)国外在桨轴系统振动控制方面已经形成了一套完整的设计规程,可以直接用于轴系降噪设计;而我国轴系设计规范很少涉及振动控制内容,现有规范只有使用安全性方面的设计要求,对轴系纵向振动的减振设计还缺少系统性指导。
2)国外在轴系振动主动控制方面的工作比较深入,在轴系振动主动控制建模仿真、振动测试等方面综合开展研究,理论计算和试验测量相互映证,确保研究结果的正确性;国内在轴系振动主动控制方法及控制策略等方面研究还有待深入,试验验证工作开展也较少。
3)国外已经将振动主动控制应用于现役潜艇并取得显著降噪效果;国内目前还未进行过推进轴系振动主动控制技术的工程应用研究,缺乏轴系纵向振动控制装置设计制造的系统化工程,工程样机处于研制或试验阶段。
2 推进轴系纵向振动主动控制系统建模方法
2.1 推进轴系纵向振动主动控制基本原理
目前,推进轴系纵向振动主动控制装置可以安装在轴(如电磁作动器)、轴承(如辅助磁推力轴承)、基座(如分布式主动吸振)等位置上。以基于惯性式电磁作动器的轴系纵向振动主动控制技术为例,其工作原理如图5所示,主动控制系统主要包括作动器、控制器、功率放大器、传感器等。通过布置在推力中间轴上的传感器实时监测其振动情况,并将其作为控制反馈信号。结合测得的轴系实时转速信号,在控制器中运用相应的控制算法产生控制信号,再将控制信号通过功率放大器放大后输入到主动作动器中。作动器产生与轴系纵向振动方向相反的控制力,并作用于推力轴上,从而减小推进轴系纵向低频振动及其传递。
2.2 推进轴系纵向振动主动控制系统建模方法
在前期的研究中,大多将螺旋桨、轴系与艇体的振动及其控制分别进行研究,获得了一些有益的研究成果,可作为开展桨-轴-艇耦合系统振动控制研究的基础。然而,螺旋桨、轴系、艇体之间的相互作用对各自的动态特性带来的影响不容小觑,一些简化的处理可能会导致系统某些动力学特性的缺失。为了更清晰地观察实际结构的振动规律,从原理上检验控制原理的可行性,建立更加准确的推进轴系数学物理模型显得尤为重要。
系统建模方法主要有解析法、数值法和数值-解析结合法3种。对于桨-轴-艇耦合系统,采用解析法难以获得精确的动力学模型,采用数值法则模型规模较大,不适进行与振动控制相关的仿真分析,而数值法和数值-解析结合法可发挥两者的优势,即对于尺寸较大的艇体可采用解析法,对于比较关注的桨轴系统,则采用数值法。因此,数值法和数值-解析结合法在桨轴艇耦合系统振动控制方面应用更为广泛。
少数研究以桨-轴-艇耦合系统为对象,且主要考虑轴系振动及其控制对艇体声辐射的影响,重点仍放在各系统耦合振动的描述方法上,其中主要采用子结构综合法。经过几十年不断发展,已出现多种动态子结构法[37 - 38]。因此,在推进轴系纵向振动研究中,螺旋桨、轴系采用数值法建模,艇体采用解析法建模,它们之间则采用子结构综合法进行关联。
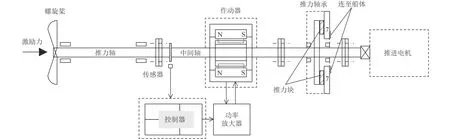
图5 作动器安装于轴上的推进轴系纵向振动主动控制原理示意图Fig.5 Active control principle of longitudinal vibration of the propulsion shaft system
3 推进轴系纵向振动主动控制策略及算法
3.1 推进轴系纵向振动主动控制策略
控制策略是振动主动控制研究的关键,直接影响到减振性能。对于谐波激励下的线性时不变系统,自适应方法已成功用于抑制干扰,如滤波-x LMS(Least Mean Square)、自适应重复控制[39 - 41]等。这些研究中通常将轴系被视为时不变系统,但实际上轴承油膜刚度随转速不断变化,这将会导致控制通道的频响在不同转速下存在明显的差别,使得依赖于确定性控制模型的自适应控制器可能失效。对于具有时变特性的系统,控制方法远比线性时不变系统复杂。此外,推进轴系振动干扰主要为谐波成分,这将要求自适应控制器具有一定的窄带干扰抑制能力。
对于时变系统,原理上均采用时变控制器,其结构或参数一般需要进行在线调整[42]。若预先获取被控对象模型或时变参数的变化规律,可对控制器进行针对性地设计,并在最优准则下建立相应的控制算法[43]。若被控对象模型变化规律无法预先获取,控制器只能通过某些先验知识进行设计,如直接采用无模型的自适应算法或在模型在线估计的基础上形成的自适应算法;对于谐波干扰的抑制,相应的控制方法研究目前还不是很充分。针对线性参数时变系统,增益调度控制已经用于时变谐波干扰的抑制[44],其增益调整参数可通过干扰频率进行计算获取。MELLER[45 - 46]等提出了一种自优化窄带干扰抑制的方法,仅对一阶时变系统和二阶时变系统有效。
不管采用哪种控制策略,被控对象模型都必须在轴系运转状态下建立,而此时系统存在复杂的干扰源,且参数变化具有不确定性。针对上述问题,目前主要有2种方法:
1)研究无模型的自适应谐波抑制方法,即通过某些先验知识对控制器进行设计;
2)研究基于模型在线估计的自适应谐波抑制方法,即需要对模型的控制通道进行辨识。
轴系纵向振动主动控制策略可在LMS算法的基础上根据轴系的实际振动特性进行构建。
3.2 推进轴系纵向振动主动控制自适应算法
由于尾部非均匀流场使得螺旋桨产生非定常激振力,桨-轴-艇耦合系统振动强线谱特征较多,因此采用窄带的自适应控制方法更加适合。自适应控制对系统周期振动可进行有选择性的抑制,由于控制信号经过饱和抑制后可能会产生波形失真,因此必须增加跟踪滤波器对波形失真引起的非线性响应进行消除。
20世纪70年代后,许多学者对自适应算法进行大量的理论与试验研究,使得自适应滤波算法日趋成熟,并提出了一些改进的算法,如归一化LMS算法、LMS牛顿算法、频域LMS算法、变换域LMS算法、分块LMS算法、QR分解LMS算法、快速截断数据LMS算法等。RLS算法收敛速度快,且收敛性能与输入信号的频谱特性无关,但计算量大,对硬件要求高,不适合进行实时处理[47]。
基于LMS算法的自适应控制在工程中已广泛应用,尤其是滤波-x LMS方法。Douglas[48]提出了适用于多输入多输出系统的多误差Filter-x LMS算法,并进行了相关实验验证。Fuller等[49 - 50]在基于 Filter-x LMS 算法基础上开展了一系列研究,并成功应用于结构振动声辐射中。王俊芳[51]针对振动响应过大时导致控制器输出饱和的问题,提出了一种将跟踪滤波与带饱和抑制的LMS控制算法相结合的自适应前馈控制方法,试验表明控制效果良好;张志谊等[52 - 54]针对频率周期振荡的系统,在Filter-x LMS算法基础上进行了深入研究,提出了内嵌跟踪滤波器的自适应控制方法,对不同结构的周期振动进行抑制,计算与实验结果表明这些方法减振降噪效果良好。
3.3 应用自适应算法需要解决的问题
应用Filtered-x LMS算法前须要解决下面2个问题:
1)参考信号的提取
产生控制器的输入需要与外部干扰信号相关的参考信号,参考信号和外部干扰信号的相关性直接影响前馈控制器的性能。如果两者信号完全相关,可使前馈控制器信号误差趋近于0。如果两者信号部分相关,前馈控制器仅能减小与参考信号相关的频响。
在实际应用中,通常很难获取外部干扰信号。因而往往通过传感器对系统振动响应的误差信号进行测量,然后在控制器参数及自适应算法的基础上构造出所需的参考信号,使其满足与干扰信号的相关性。
2)控制通道的辨识
对被控对象模型的控制通道辨识方法主要有离线辨识和在线辨识2种。离线辨识主要针对系统参数变化缓慢或近似不变的情况,可使控制算法大为简化,计算量也大幅减少。然后实际情况下系统特性往往会发生变化,且离线辨识难以满足系统的控制精度及鲁棒性要求,因而必须采用在线辨识的方法。
控制通道的在线辨识方法其本质是在控制器的输出端叠加噪声,即采用LMS算法获取模型控制通道的有限脉冲响应序列,再采用子空间滤波方法从响应序列中滤出那些与外部干扰相关的特征,恢复出控制通道真实的脉冲响应特性。
4 推进轴系纵向振动主动控制试验
关于轴系纵向振动主动控制试验,张志谊和胡芳等[34 - 36]的试验验证较为系统完整,其试验模型如图4所示,本节以此为例进行说明。该方案能够在宽频带内抑制轴系和艇体的振动,对控制频率没有选择性,而且在控制性能上远高于动力吸振。试验过程中,推力轴承间的油膜刚度和水润滑橡胶轴承的水膜刚度由于随转速变化,轴系的支承刚度和频响特性也随之变化。图6是推力轴承处控制前、后的时域、频域响应,可以看出无模型控制有效。
试验结果表明:主动作动器的控制力与激振力对应的频响特性基本一致,在自适应反馈控制下,可以对激振力引起的振动进行不同程度的抑制;针对控制通道的频响特性依赖于转速,控制器能够进行在线调整增益,且自适应反馈控制效果非常明显。

图6 扫频激励下推力轴承处振动控制Fig.6 Vibration control of thrust bearing under sweep-sine excitation
5 结 语
对推进轴系纵向振动主动控制系统建模方法、控制策略及自适应算法的国内外研究现状进行归纳总结,探讨了推进轴系纵向振动主动控制中存在的一些问题,给出了轴系纵向振动主动控制试验验证情况。基于以上国内外研究成果,提出以下研究建议:
1)开展桨-轴-艇体耦合系统精细化动力学建模研究,分析螺旋桨激励特性及其诱发的推进轴系与艇体的振动声辐射,研究不同推进轴系纵向振动主动控制方法下减振效果,为主动控制系统设计提供技术支撑;
2)相比被动控制系统,主动控制系统主要针对轴系纵向振动的低频段,传统评价方法无法客观准确地评价推进轴系纵向低频振动主动控制效果,需综合权衡引入主动控制系统后增加的资源和取得的控制效果,提出一种操作性好、客观真实反映主动控制效果的评价方法;
3)注重推进轴系和主动控制系统的一体化设计,尽量在原有基础上进行改装,满足轴系匹配性要求,减少不利影响。此外,还需对安装主动控制系统后的推进轴系进行强度校核和抗冲击性能分析,以满足工程化应用要求。
