一种双波源车辆行车方向识别方法*
2018-11-19张奔牛张明辉
秦 攀,张奔牛,张明辉
(1.重庆交通大学 信息科学与工程学院,重庆 400074; 2.重庆交通大学 土木工程学院,重庆 400074;3.重庆石定科技有限责任公司,重庆 400074)
0 引言
随着我国现代化的发展,汽车拥有量不断攀升,交通压力不断增大,并且有些地方(如施工或交通瓶颈路段)会采用可变车道的方式解决交通拥堵问题,但是在狭窄的路段或是发生交通事故的路段就会造成严重的拥堵。因此有必要加强狭窄道路的行车安全,给驾驶员提供可靠信息,降低交通事故发生率,从而提升车辆的通行率。
对于车辆检测的研究有很多,主要包括感应线圈检测器、地磁检测器、超声波检测器、红外线检测器、视频检测器、微波检测器,六类交通检测技术性能比较[1]如表1所示。
张佳贺、董伟等人[2]申请的专利采用的是由上盖板、框架、压力传感器、基础护边组成的装置,需要将压力传感器安装在路面上,会破坏路面的结构,影响道路使用寿命。A·哈格罗特等人[3]申请的专利需要知晓车轮转速,使用车轮转速传感器判断该车辆的行车方向。彭科举、陈新、周东翔等人[4]是基于单目摄像头利用机器视觉与几何的方法完成对车辆行驶方向与道路之间夹角的检测。文献[5-8]是对可变车道进行研究,在交通流不对称的情况下通过诱导策略提升车辆的通行率。而吴建勋[9]只是对现在设置的单行道的方向性问题进行研究。
现有的研究成果主要集中在对车辆的检测技术和可变车道控制方法的研究,但是车少路窄的时候只是需要给予驾驶员足够的提示信息就可以提高驾驶员的安全性以及通行效率,并且针对现有的车辆行车方向识别方法安装复杂、对道路造成破坏、影响道路寿命等问题,提出一种识别道路车辆行驶方向的方法,并通过指示灯给予驾驶员提示,达到安全通行、快速通过结点路段的目的。

表1 六类交通检测技术性能比较
1 车辆行车方向识别方法设计
1.1 车辆行车方向识别方法总体设计
本文提出的车辆行驶方向识别方法根据传感器信号传输到控制器的时间差判断信息源的方向,而本方法运用车辆检测技术检测车辆的通过,微波传感器经数字化处理后只有高低两种情况。对于一个传感器,如果外界有行车,那么信号源将发生跳变,如果将两路微波传感器安装在道路的不同位置,那么两路微波触发就会产生一个时间差,如图1所示,根据产生的时间差来识别车辆的行车方向。在区域1中,信源A比信源B先产生低电平,信源A模块先触发;同理,区域2是信源B先触发。
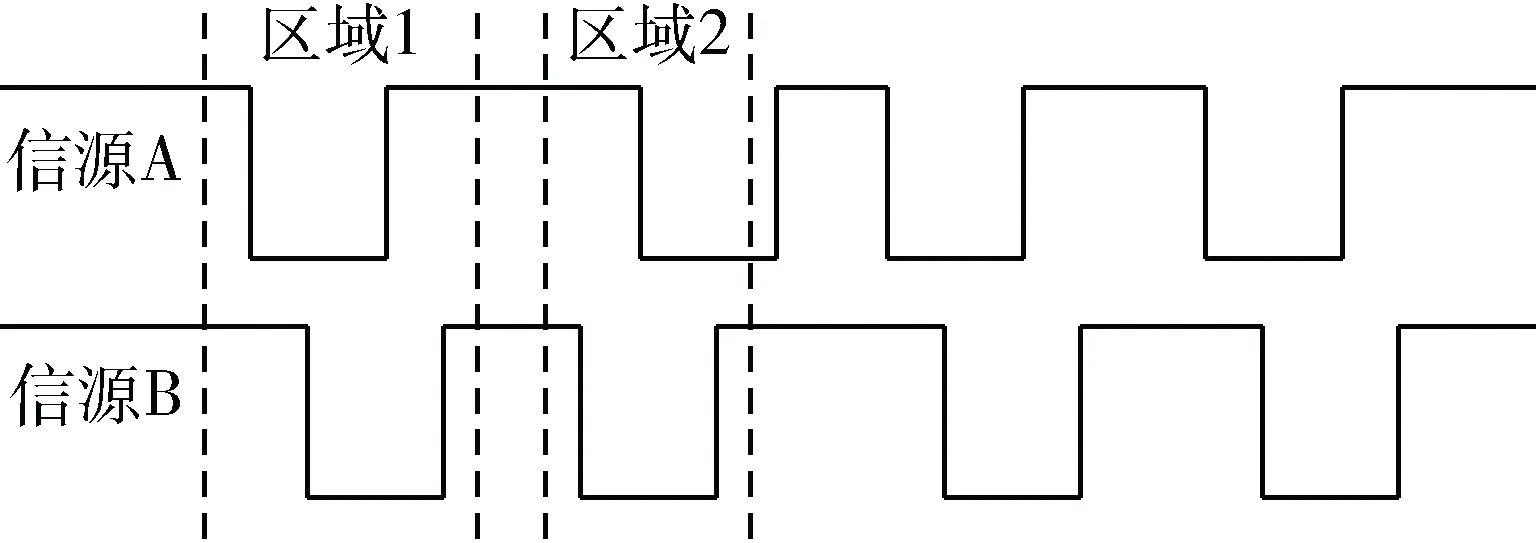
图1 车辆行车方向识别方法的原理
车辆行车方向识别法实现了车辆行车方向的识别、指示灯提示以及通过串口上传该路段车辆的行车方向信息。车辆行车方向识别方法框架主要是由两路微波传感器、74LS04反向器、STC12LE5A60S2单片机、指示灯、STC Auto programmer USB-TTL及PC机构成。微波传感器是一个独立的模块,固定在路肩对车辆进行检测,输出的电信号经过反向器反向后接入到单片机,单片机对接收到的信号进行中断处理,根据检测到两路微波信号的时间先后来判断车辆的行驶方向。并通过STC Auto programmer USB-TTL将行车方向识别结果上传至PC以及对不同行车方向指示灯进行控制,给出不同提示信息。总体设计如图2所示。
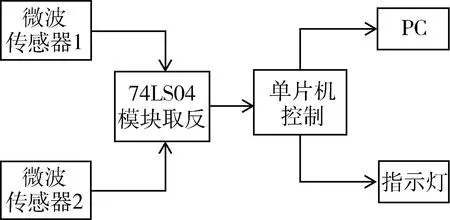
图2 车辆行车方向识别方法总体框架
本设计方法采用QY-12V-20Ah锂电池进行供电,方便携带,使用时间长,使用LM2596 DC-DC电压转换模块将锂电池12 V电压转换成能给单片机、74LS04、微波传感器模块供电的3.3 V电压。
1.2 车辆行车方向识别方法硬件设计
整体硬件电路设计仿真由晶振电路、复位电路、串行通信电路、微波信号生成电路和LED警示灯组成。晶振电路由电容C1、C2和晶振X1构成,X1选用11.059 2 MHz的频率。本设计的复位电路为低电平复位电路,由电阻R1和极向电容C3构成,通过复位电路将电路恢复到起始状态。串行通信电路通过VIRTUAL TERMINAL虚拟器进行仿真,使用RXD和TXD两个接口进行数据的传输。微波信号生成电路使用两路方波信号进行模拟,然后通过反向器74LS04进行反向处理。方波B和方波D模拟微波传感器1和微波传感器2,方波B和方波D的高电平都设置为5 V,通过设置两路方波周期的不同实现电平触发时间上的差异,利用OSCILLOSCOPE示波器进行观察产生的波形。而LED警示灯根据单片机接收微波信号判断所属类别来控制警示灯。整个硬件电路如图3所示。
图4(a)将方波B的周期设置为1.5 s,方波D的周期设置为1 s。白色波形是方波B的波形图,灰色波形是方波D的波形图,从两个波形对比得出是方波D(灰色)先产生低电平而触发,经过单片机控制器处理得出的结论是“the car opens to the left”,指示灯D1点亮。而图4(b)刚好和图4(a)相反。需要说明的是产生的方波并不是理想的高低电平,它有一个倾斜程度,但是单片机只是检测高低电平的变化,同样能够达到模拟的目的。

图4 电路仿真效果
本设计需要使用串口进行数据的传输,因此需要将单片机时钟频率、程序波特率以及VIRTUAL TERMINAL模拟器波特率进行同步,都设置为11.059 2 MHz。
1.3 车辆行车方向识别方法软件设计
软件设计主要是通过单片机采用两路外部中断方式处理接收的两路微波信号。单片机将处理的结果通过串口中断的方式上传至PC。总体实现大致流程图如图5所示。

图5 总体实现大致流程图
两路微波信号采用单片机的两路外部中断接口进行控制,一旦触发中断,执行相应的程序段,标记相应的传感器。单片机外部中断可以采用下降沿触发或是低电平触发,考虑下降沿抖动问题,本设计采用低电平触发。计数两次以上将会初始化变量,重新标记,当有一个传感器已经触发时,产生一个标志位flag=1;当另外一个传感器也触发时,就可以判断车辆是离第一个传感器较近的位置行驶而来,因此可以判断出行驶方向。
2 实验与分析
利用上面设计的方法,在室内和室外都做了相关的实验,利用示波器进行验证分析。方法测试如图6、图7所示。
图6(a)和(b)是室内外测试场景图,不论是在室内还是室外都采用了示波器进行验证分析,分析方法得出的结果与真实结果是否相符。图7(a)和7(b)是示波器上两路信号波形图,图7(a)白色波形先发生突变,PC机上接收到“the car open to the right!!!”,指示灯绿灯点亮。而图7(b)是灰色波形先发生突变,PC机上接收到“the car open to the left!!!”,指示灯红灯点亮。当没有车辆通过时向PC发送“no car!!!”消息,如图7(c)和7(d)所示,和实际结果相符。
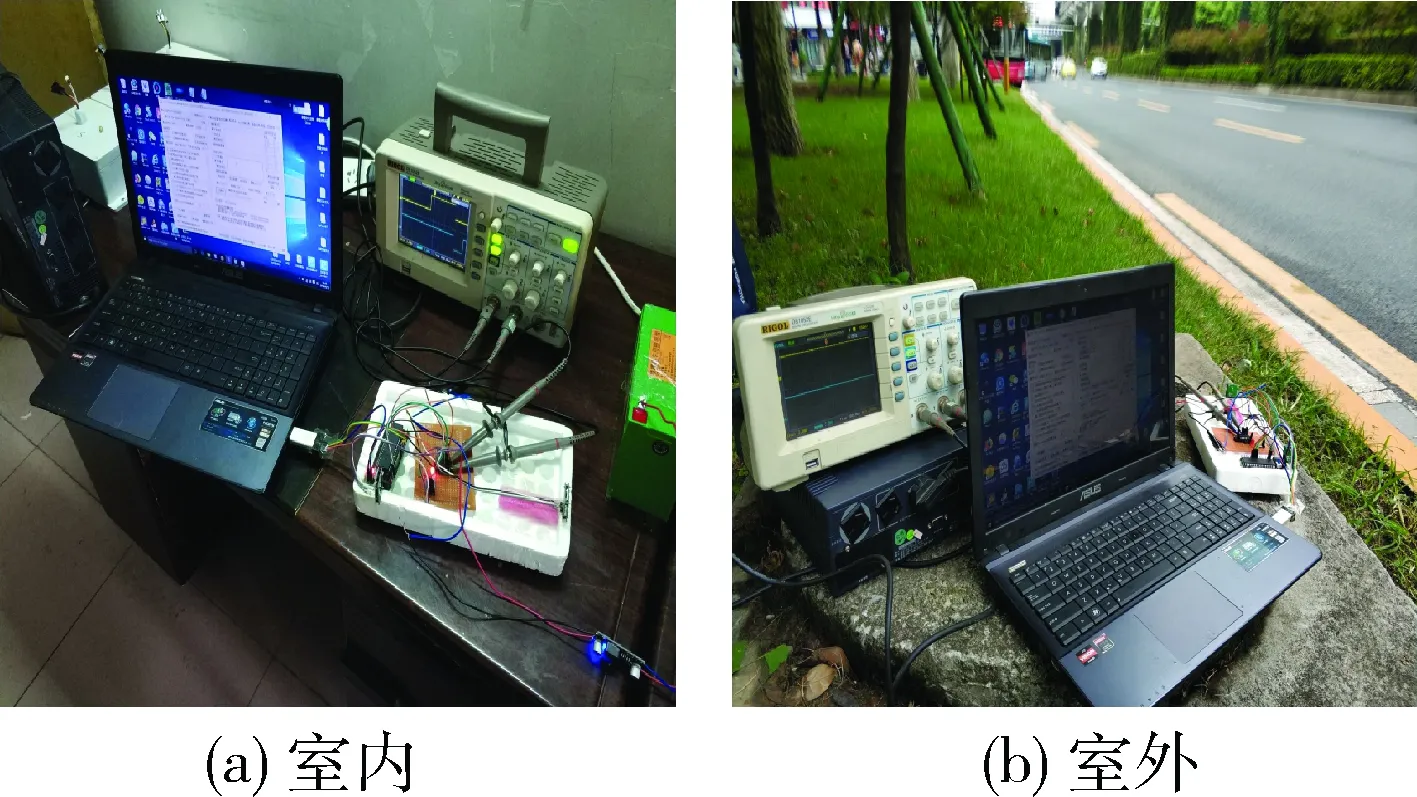
图6 室内外场景调试
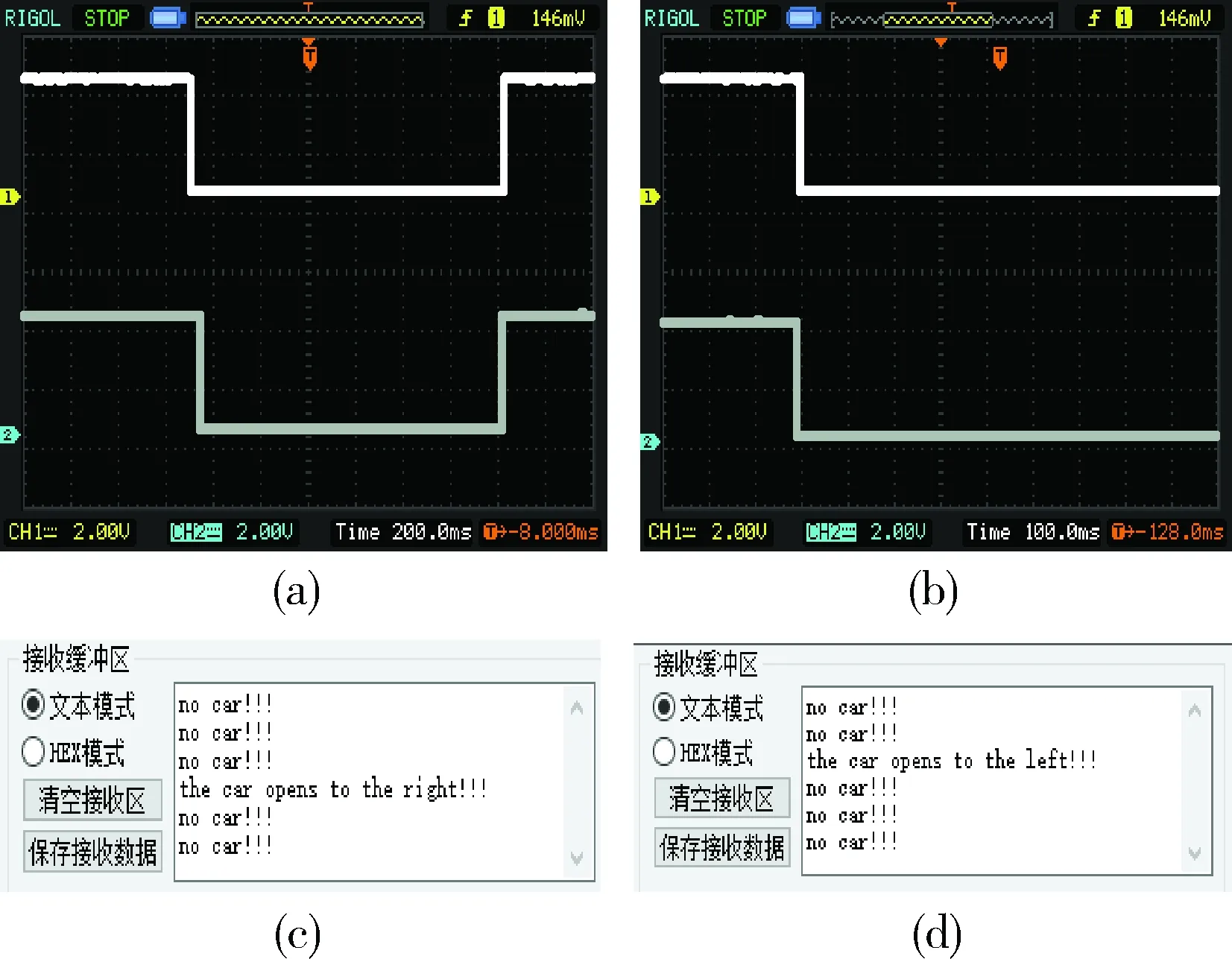
图7 测试结果
3 结束语
本文提出一种双波源车辆行车方向识别方法,通过车辆经过路段时会触发双路微波传感器产生突变的电信号,突变的电信号经过74LS04反向器反向,将反向的电压接入到单片机3.2和3.3两个外部中断端口,而单片机一旦接收到外部中断就会执行相应的中断程序,标记传感器发生的时间先后标记次数,从而根据触发时间差识别车辆行车方向的方法。单片机通过3.0(RXD)和3.1(TXD)端口与USB-TTL进行连接,将行车方向识别信息发送到PC上,并且点亮警示灯以提醒驾驶员,防止交通事故的发生,增强道路的通畅性。在实验中使用了LM2596电压转换模块、QY-12V-20Ah锂电池、示波器、PC等辅助工具。通过室内外实验研究验证,该方法能够对道路的车辆行车方向做出正确的判断。
本文提出了一种简单有效的车辆行车方向识别方法,但是实际复杂的道路环境会出现很多干扰因素,如行人、自行车、小鸟等。在实际工程应用中首先是在安装位置上选取干扰条件较少的道路进行安装;对于道路以外的干扰通过金属对信号发射做方向性屏蔽;对行人、自行车利用触发波形宽度、波峰等做进一步研究来排除干扰;增加道路音频数据,和微波信号进行融合处理,得出更准确的结果。这些问题需要在今后进行深入研究,来提升车辆行车方向识别的抗干扰性和鲁棒性。