无线传感器网络中基于N曲线的路径规划方案
2018-11-19谢绍国
谢绍国
(安庆师范大学 计算机与信息学院,安徽 安庆 246133)
随着无线传感器网络的发展,无线传感器网络节点定位成为无线传感器网络研究的热点之一[1].传统的无线传感器网络节点定位采用的是静态锚节点定位,此定位方式成本高、效率低.如果采用移动锚节点定位,可减少锚节点的数量,从而降低成本、减少时间、提高效率.针对移动锚节点的路径规划,研究人员已提出一些方案.文献[2]研究了无线传感器网络中移动锚节点的路径规划问题.文献[3]提出了一种基于几何公式和批处理的移动无碰撞路径规划机制,解决了移动传感器节点的部署问题.文献[4]提出了一种移动锚节点路径规划方案,该方案能够降低定位误差,所有节点均能确定位置.为了解决直线问题和减少节点能量消耗,文献[5]提出了一种Z曲线的路径规划机制.文献[6]中提出了一种基于无线传感器网络的避障路径规划方法.文献[7]给出了一种基于无线传感器网络的动态路径规划方法.文献[8]分析了测距和非测距2种技术方案用于移动锚节点定位的性能.文献[9]提出了一种基于虚拟力的3维移动锚节点的动态路径规划方法.为解决移动锚节点的路径规划问题,文献[10]提出了一种宽度优先和回溯式贪婪算法,该算法把路径规划问题转化为图的生成树及遍历问题.大部分的路径规划方案存在锚节点共线问题,使得节点定位精度不高.为了减少定位时间和解决锚节点共线问题,笔者提出一种N曲线的路径规划方案.
1 路径规划方案
1.1 N曲线路径规划方案
N曲线路径规划方案的所有节点均部署在2维空间.如果移动锚节点沿N曲线移动,则未知传感器节点的定位将更准确.考虑到实际环境,路径规划方案是按有障碍物的情况设计的.该文N曲线移动锚节点路径规划方案涉及N曲线的等级,所以先介绍N曲线的等级.等级为1的 N曲线如图1所示,一个2维区域分成4块,每个小方块的边长为d,移动锚节点沿N曲线移动并经过2维区域的中心及小区域的中心,4块小区域的中心分别记为C1,C2,C3,C4.等级为2,3的N曲线分别如图2,3所示.
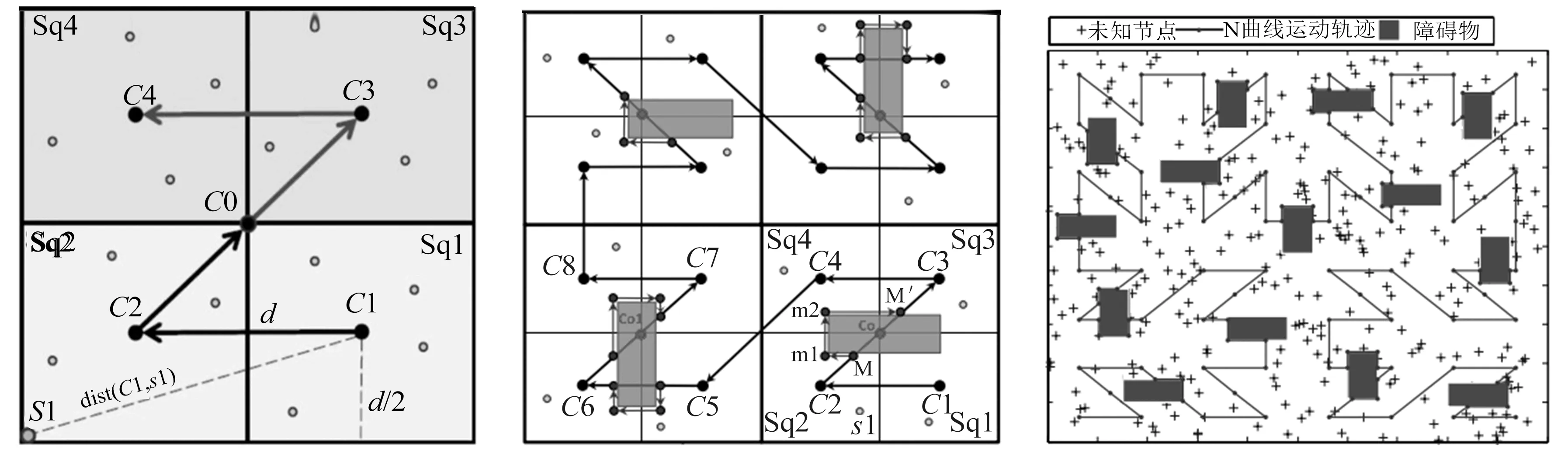
图1 等级为1的N曲线 图2 等级为2的N曲线 图3 等级为3的N曲线
N曲线移动锚节点路径规划有如下步骤:
(1) 分析通信半径内未知传感器节点定位的情况及节点间关系.移动锚节点与未知传感器节点间通信的条件为:移动锚节点在未知传感器节点的通信半径内,即满足
dist(bj,si)≤Rc,i=1,…,n,j=1,2,3,
(1)
其中:si为未知传感器节点;bj为移动锚节点;dist(bj,si)为移动锚节点与未知传感器节点间的距离;Rc为未知传感器节点的通信半径.如果移动锚节点沿N曲线移动并在未知传感器节点的通信半径内,则未知传感器节点能定位.
(2) 移动锚节点沿N曲线移动,调整移动锚节点的通信半径,保证所有的未知传感器节点均能定位.
(3) 移动锚节点在移动过程中,选择距离未知传感器节点最近的3个移动锚节点的位置坐标,将其发送给未知传感器节点.
(4) 确定距离未知传感器节点最近的3个连续非直线的移动锚节点的位置坐标.
1.2 节点定位
采用非测距的定位算法,对未知传感器节点的位置进行定位.采用非测距的定位算法可减少传感器节点的能量消耗,延长网络的生命周期.接收信号强度(received signal strength,简称RSS)很容易获得且不需要额外的电路,因此减少了成本和能量消耗.无线传感器网络节点的发射、接收芯片均装有信号强度指示器(received signal strength indicator,简称RSSI),这样RSS测量无须额外的花费.移动锚节点在移动过程中,需要发送自己的坐标信息,因此移动锚节点需要配置一个GPS定位模块.
2 性能分析
已有的路径规划方案有HILBERT[11],SCAN[11],CIRCLES[4]和LMAT[12].通过仿真分析该文的N曲线路径规划方案,且将其与已有的路径规划方案进行比较.
2.1 无线信道模型
该文仿真实验中采用的无线信道模型如下
RSS=PL0-10βlog10(dn/d0)+Nα,
(2)
其中:dn为锚节点与未知传感器节点的距离;PL0为d0(d0=1 m)处的接收信号强度;β为路径损耗因子;Nα为标准偏差为α、均值为0的高斯噪声.
2.2 仿真参数
实验区域大小为100 m×100 m,200个未知传感器节点随机分布在试验区域.1个移动锚节点沿规划路径移动,移动锚节点速度为2 m·s-1.Rc/d分别为0.50,0.75,1.00,1.25,1.50,1.75,2.00,2.25,2.50;路径损耗因子β为3.0;标准偏差α为3;PL0为55;d0为1 m;发射功率为-25 dBm.
2.3 仿真实验
(1) 定位误差率
图4为几种方案的定位误差率比较.从图4可知,该文方案的定位误差率最小.随着Rc/d的增加,该文方案的定位误差率越来越小.当Rc/d等于0.5时,该文方案的定位误差率为0.02,比其他的方案均小.
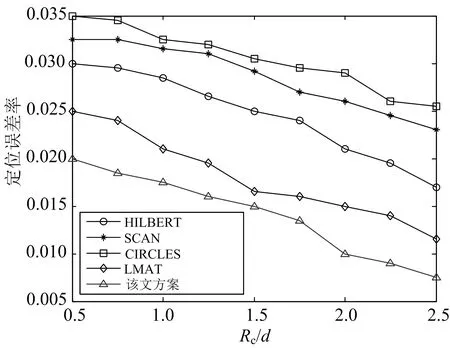
图4 定位误差率
(2) 定位时间
图5为Rc/d为2时未知传感器节点的平均定位时间.从图5可以看出,采用该文方案时,未知传感器节点的平均定位时间最少,优于其他4种路径规划方案.当移动锚节点速度为1~5 m·s-1时,5种路径规划方案的未知传感器节点平均定位时间均在2 min以内.
(3) 定位成功率
图6为采用该文方案时未知传感器节点的定位成功率.从图6可以看出,未知传感器节点的平均定位成功率随Rc/d增加而增加.当Rc/d等于0.5时,未知传感器节点的平均定位成功率为94%;当Rc/d等于2.5时,未知传感器节点的平均定位成功率为99%.
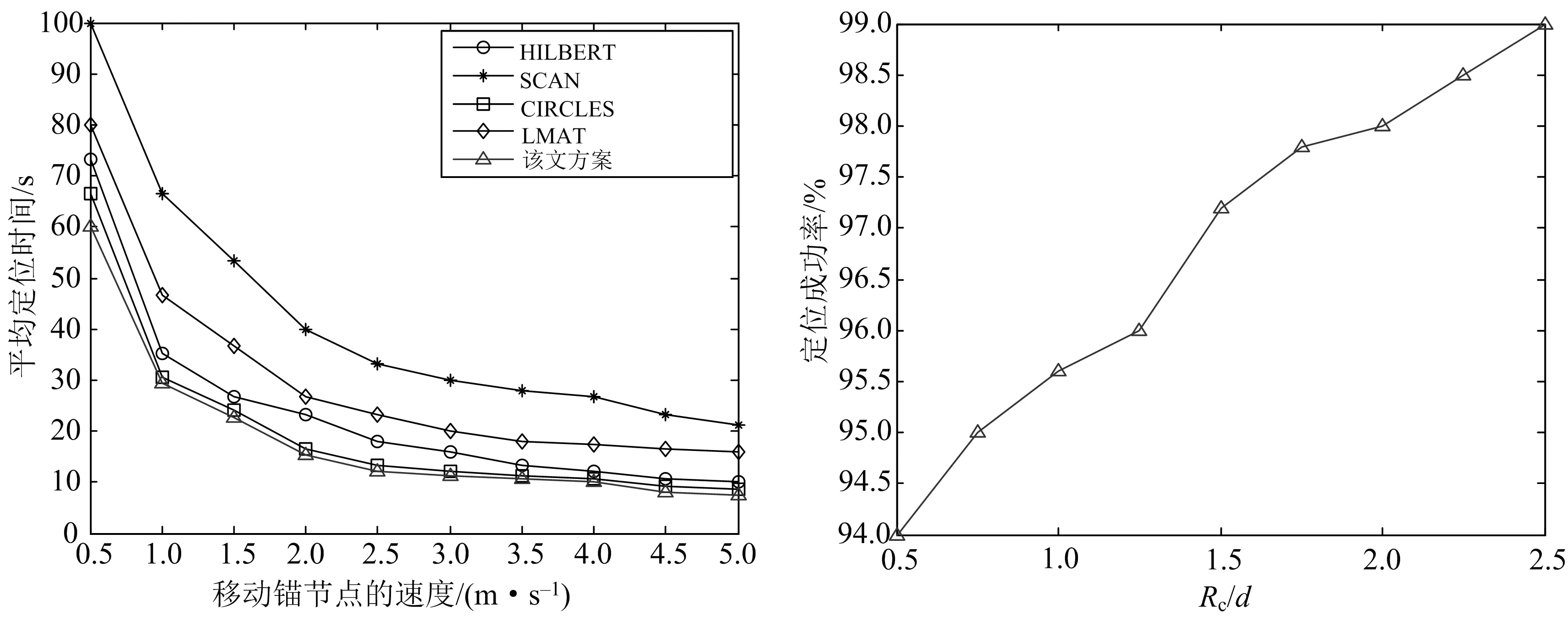
图5 平均定位时间 图6 定位成功率
3 结束语
为解决锚节点共线问题和减少定位时间,笔者提出了一种N曲线路径规划方案.从仿真结果可知,该文方案与其他4种方案相比,解决了锚节点共线问题,减少了定位时间和定位误差率;该文方案的节点定位成功率很高,当Rc/d等于2.5时,定位成功率为99%.
