七自由度机械臂动力学分析方法
2018-11-19周晓丽陈永强穆星科
周晓丽 陈永强 穆星科 谭 珏
七自由度机械臂动力学分析方法
周晓丽 陈永强 穆星科 谭 珏
(中国运载火箭技术研究院研发中心,北京 100076)
针对传统基于控制系统的空间机械臂的运动轨迹设计及其抓捕动力学仿真等正向分析的控制方程建模和解算过程复杂、设计周期长的问题,基于CATIA模型运动轨迹规划,提出了一种用于航天器抓捕目标的七自由度机械臂ADAMS仿真分析方法,通过该方法,能够快速获得空间飞行器在机械臂抓捕和释放过程中的扰动姿态以及机械臂各个关节受力情况,为初期方案的设计和选型提供参考。
机械臂;动力学;分析方法

1 引言
七自由度机械臂属于单臂机器人,相比于六自由度或者更低自由度机械臂,具有更多的姿态,以及更好的工作空间,具有良好的可达性。随着机械臂自由度的增加,传统基于控制系统的空间机械臂的运动轨迹设计及其抓捕动力学仿真等正向分析的控制方程建模和解算过程相当复杂,设计周期长,难以满足时效性需求。而在工程设计方案阶段,要求能够高效、快速获得机械臂空间抓捕。释放物体时,机械臂对飞行器的干扰,正向分析方法无法满足要求。针对此问题,基于CATIA模型运动轨迹规划,本文提出了一种用于航天器抓捕目标的七自由度机械臂ADAMS仿真分析方法。
机械臂操作是非常复杂的动力学系统,由多个连杆和关节组成,具有多个输入和输出,以及非常复杂的耦合关系和严重的非线性。罗敏、刘世平等针对七自由度机器人的结构特点,以拉格朗日法为理论基础建立机器臂的动力学方程,得到各关节的力矩方程,并对机械臂的动力学解算和分析,得到角度或力矩的变化曲线[1]。冯玉倩,高锦宏针对七自由度空间机械臂在轨捕获目标任务的需求,提出了一种避障路径规划方法[2]。利用优化算法,在七自由度空间机械臂的自由工作空间内无碰撞路径优化。
2 七自由度机械臂机构原理
本文研究的七自由度机械臂是由7个转动关节组成的机械装置,每一个转动关节由旋转电机驱动,结构简图如图1所示。图中机械臂杆件编号和电机编号从底座至末端执行器依次为1,2,…,7。该机械臂是一个高度非线性、强耦合、位姿时变的多变量系统。
通过D-H法分析,可获得其七自由度机械臂连杆参数见表1。
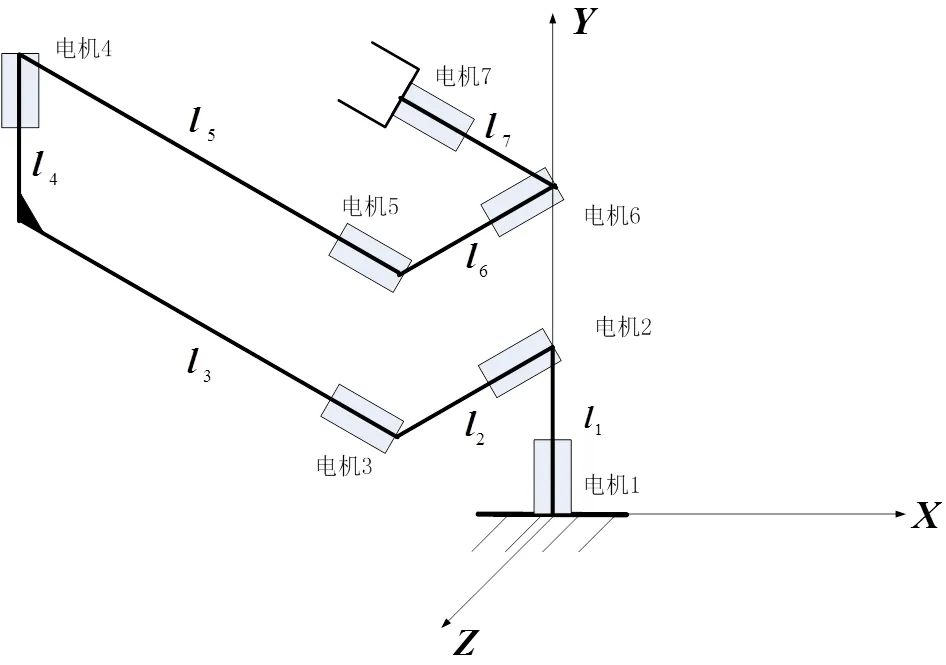
图1 七自由度机械臂简图
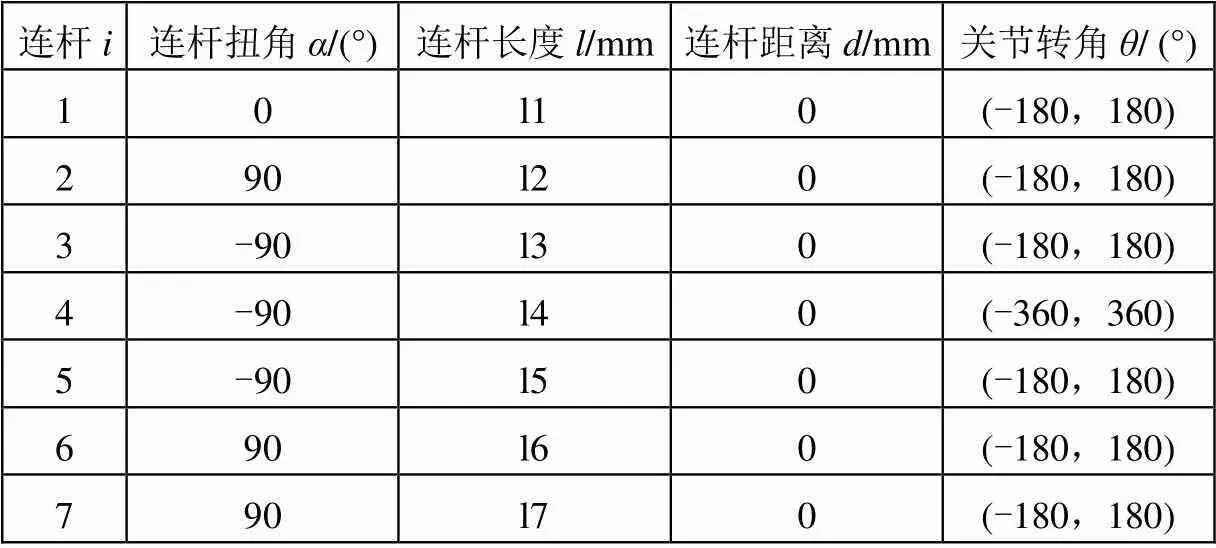
表1 七自由度机械臂连杆参数表
3 七自由度机械臂CATIA仿真模型轨迹规划
机械臂在运动过程中,不仅需要末端执行器达到期望的位置和姿态,还需考虑避让其它设备,合理规划运动路径,避免机械臂在运动时与其它设备产生干涉。
机械臂CATIA轨迹规划分为以下几个过程:a.建立空间七自由度机械臂CATIA机构运动模型;b.设置各转动部件运动关系;c.设置并记录机械臂各个转角的角度;d.依据运动结果修正设置参数。其中第三步最重要,是后续机械臂动力学仿真驱动源。
4 建立七自由度机械臂ADAMS仿真模型
4.1 七自由度机械臂建模
根据D-H机械臂连杆参数表,建立参数化的ADAMS机械臂电机和杆件模型。对建立完毕的杆件模型添加约束、摩擦、接触力和驱动等,并依据模型运动关节预置角度设置各个关节的运动转角,最终建立了参数化七自由度机械臂ADAMS仿真模型(见图2),图中方块为机械臂需要抓捕物体,最后对机械臂和抓捕物体按要求附质量属性。
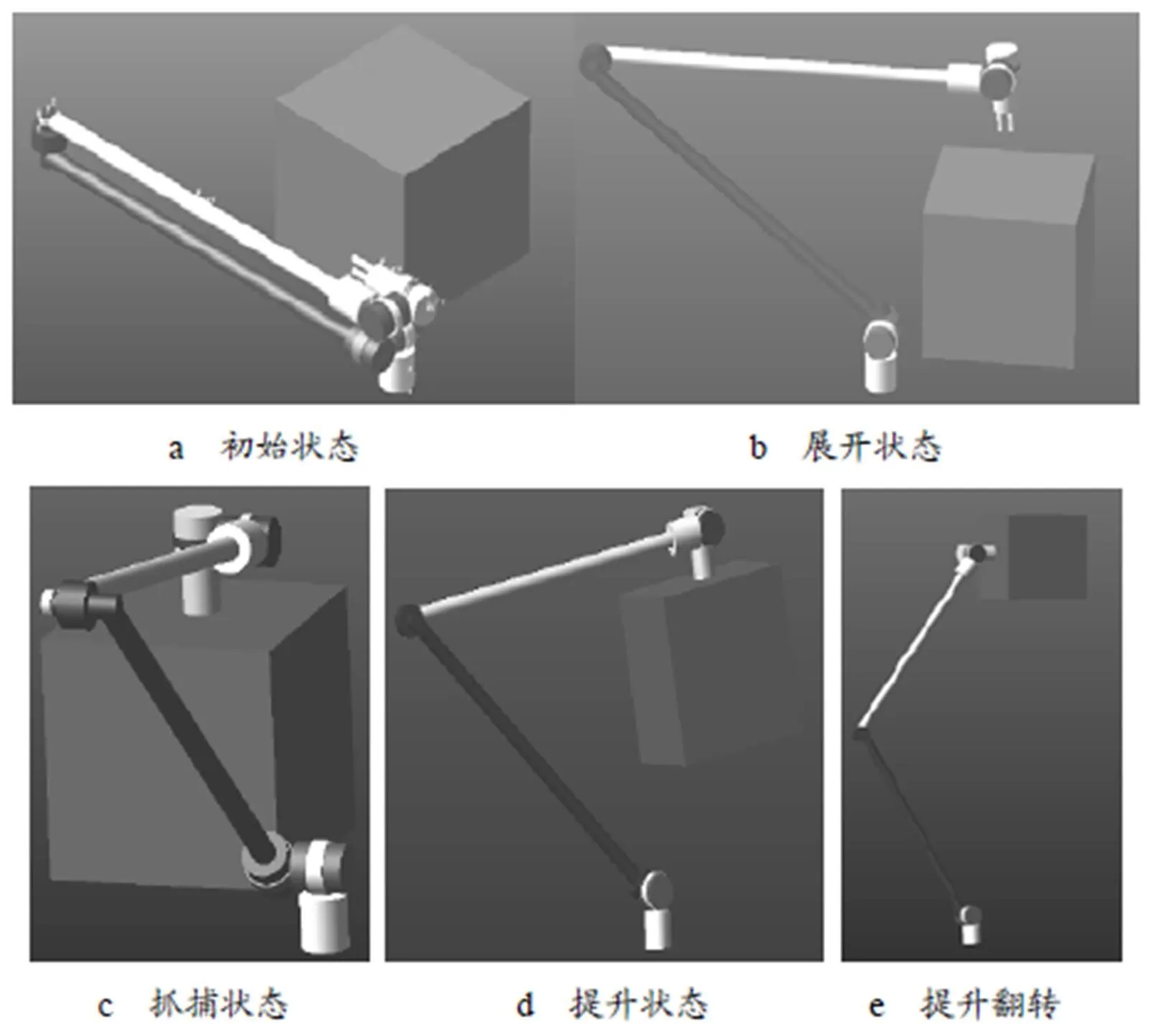
图2 七自由度机械臂ADAMS仿真模型
由于参数化的机械臂模型与CATIA模型中建立的机械臂模型存在视觉差异,必要时可将CATIA三维模型中的机械臂导入到ADAMS中,此时导入的模型为无质量特性的虚壳,在动力学仿真过程中无作用。
4.2 完成ADAMS动力学仿真
建成的机械臂模型仍不能实现机械臂的抓捕、释放动作,需要编制机械臂运动脚本,使机械臂按照脚本仿真。具体脚本:机械臂由放置零位状态开始展开,当机械臂运动到指定目标时,机械臂完成抓捕动作,然后机械臂将物体抓起,带物体完成一定角度范围的伸展动作,直至最终停止。
在完成脚本仿真计算后,进入结果后处理过程。在后处理中,可以直接得到机械臂各运动电机的围绕设定质心的力和力矩,同时可以效验及调整CATIA模型中建立的预置角的角速度以及角加速度,最终得到机械臂抓捕全过程的干扰力和力矩。
机械臂末端机械手相对于坐标原点运动轨迹如图3所示。飞行器连接处机械臂对飞行器的干扰力以及力矩见图4、图5。如图4、图5所示,机械臂在独自伸展过程中,对飞行器的干扰最小,当机械臂抓捕物体完成动作时,飞行器受到的干扰与机械臂伸展长度以及伸展速度有关,即与机械臂各个电机的转动角速度有关。

图3 机械臂末端机械手相对于坐标原点运动轨迹
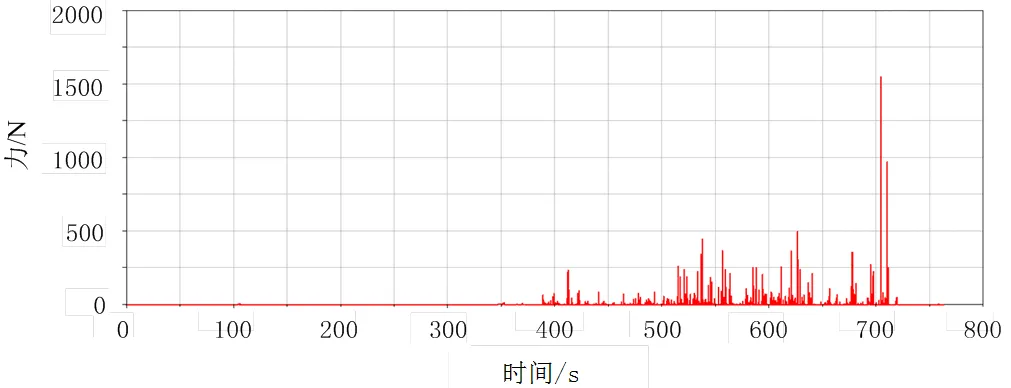
图4 机械臂抓捕过程对飞行器的干扰力
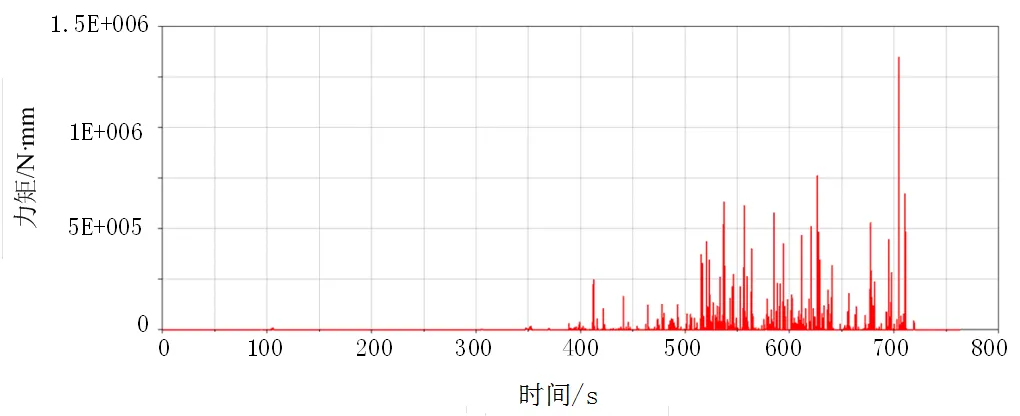
图5 机械臂抓捕过程对飞行器的干扰力矩
5 结束语
a.通过建立CATIA机构运动模型,合理规划了七自由度机械臂抓捕合作目标物体运动轨迹,为ADAMS的动力学仿真提供了各个关节的驱动预置角度。
b. 利用CATIA模型建立的运动轨迹完成了基于ADAMS对七自由度机械臂动力学仿真,求出了各个电机的驱动力和力矩随时间的变化曲线。
c. 该方法的建立,为控制空间机械臂的运动提供快速、有效的分析方法和手段,也为仿真研究七自由度空间机械臂的动态特性以及对飞行器的影响分析的研究提供重要参考依据。
1 罗敏,刘世平,李世其,等. 七自由度空间机械臂运动仿真技术研究[J].机械与电子,2013(5):69~72
2 冯玉倩,高锦宏. 基于ADAMS的七自由度机器人动力学分析及仿真[J].北京石油化工学院学报,2013(2):39~44
Dynamic Analysis Method for 7 DOF Space Manipulator
Zhou Xiaoli Chen Yongqiang Mu Xingke Tan Jue
(Research and Development Center, China Academy of Launch Vehicle Technology, Beijing 100076)
As the traditional method to plan the trajectory of the space manipulator is based on the control system, it’s too complicate to build the control equations and solve them. In this paper, an ADAMS simulation method which based on the CATIA model trajectory planning is proposed. It can be used for the 7 DOF space manipulator to capture a target. By using this method, the disturbance and the force of each joint suffered can be obtained quickly during the capture and release process. It provides reference to the original design of the space manipulator.
manipulator;dynamics;analysis method
周晓丽(1977),高级工程师,机械设计制造专业;研究方向:航天器结构机构总体设计。
2018-06-28
