移动机器人位姿检测系统的设计与实现
2018-11-16李金鑫周卫华
李金鑫 周卫华
移动机器人位姿检测系统的设计与实现
李金鑫 周卫华
(台州职业技术学院,浙江 台州 318000)
针对现有移动机器人位姿检测系统误差大、传感器不易安装等问题,本文设计了一种利用机器视觉来实现移动机器人位姿检测的系统。工业相机实时采集运动目标图像,结合LabVIEW开发平台,利用模式匹配方法计算移动机器人的位姿信息。本文研制了测试系统并进行相关测试,实验结果与理论值基本一致,且具有较高的精度,为后续的进一步深入研究打下了基础。
移动机器人;机器视觉;模式匹配;位姿检测;LabVIEW
现阶段,移动机器人的特性及应用是研究的一个热点[1]。移动机器人的应用领域广泛,已经从传统的工业领域扩展到医疗服务、教育娱乐、勘探勘测、生物工程、救灾救援等新领域[2]。
移动机器人的位姿检测是移动机器人的关键技术之一[3]。传统的测量方案是采用加速度计和位移传感器等接触式装置,通过间接测量的方法来估算移动机器人的位姿,存在误差较大、传感器等辅助装置安装困难等问题[4]。机器视觉作为一种典型的非接触式测量技术,在机器人领域得到越来越广泛的应用[5-6]。机器视觉通过实时拍摄运动图像,检测图像平面内各个特征像素点的状态,具有测量范围宽、非接触、不改变被测物特性等诸多优点。如靳璞磊采用智能相机识别工件的尺寸,结合工业机械手实现分拣功能[7]。钟钜斌通过结合视觉与巡线技术来实现仓储机器人的定位与路径规划[8]。浙江大学的余小欢[9]提出了基于双目立体视觉的微小型无人机的室内三维地图构建系统的研究与设计。
本文基于NI公司的LabVIEW平台,结合千兆以太网工业相机,通过检测特征标志点,开发了一套检测移动机器人位姿的系统。通过图像识别移动机器人标志点的位置,计算出移动机器人线速度及角速度等信息,测试结果与理论值基本一致。
1 系统硬件组成
位姿检测系统主要由相机、标志器以及工业控制计算机组成,标志器固联在移动机器人上,相机固联在大地上。相机采集图像并通过千兆网线上传到工业控制计算机上,采集频率为20Hz。工业控制计算机识别标志物在图像上的位置,并通过标志物计算移动机器人的位姿等信息。
标志器上采用美国Honeywell公司的红外发光二极管SE3470-003作为光学特征点,SE3470-003可加的电流最大可以达到100mA,它的发射光波长是880nm,散射角可以达到90°。
由于相机固定在平台上方,从相机传送出来的数据至少要经过十几米才能传递到工业控制计算机,因此对相机的数据输出方式有要求。本文智能相机采用Basler千兆以太网相机配合NI公司的Gige Vision帧接收器,帧接收器最终通过网络接口与工控主板链接。
2 系统软件设计
图像处理的核心是识别图像中标记物的位置,并提取相应的信息。本文采用图像匹配的算法,同时为了进一步提高图像匹配的效率,在处理中增加了高斯金字塔灰度值算法。

图1 软件程序流程图
2.1 模板匹配算法
模板匹配的方法,即先选取标准图像作为模板,然后在要检测的图像区域中选取与模板最匹配的图像[10]。
如图2中所示,模板在源图上移动。根据模板和待测源图对应点的方向向量进行计算,二者的相似度法则可用下式进行判断:
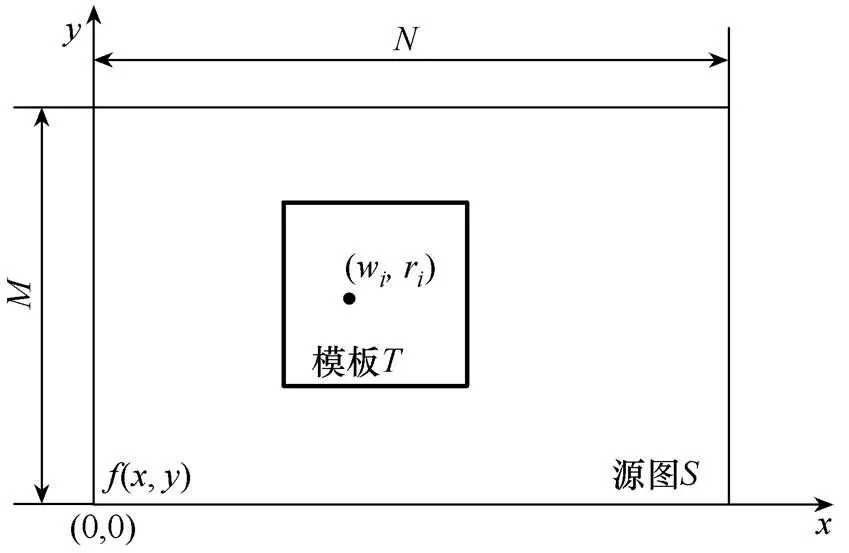
图2 模板T及源图S示意图

2.2 图像金字塔
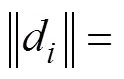
图像匹配算法在实际的应用过程中,由于计算量过大,无法满足计算实时性的要求为了提高模板匹配算法的快速性,所以本文采用高斯金字塔灰度值匹配算法。算法需要构建一组源图像及分辨率大小依次排列的模板图像,如图3所示。
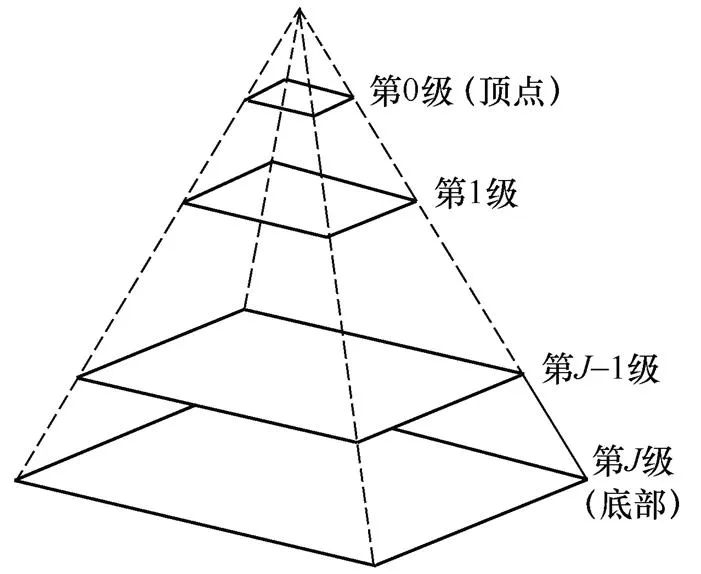
图3 模板分辨率金字塔图形
模板的金字塔图形从低到高分辨率逐渐降低。图像匹配过程中从最顶端开始,得到候选匹配点,再将每个候选匹配点按比例映射到下一层的金字塔图像中,重复此过程,直到金字塔最底层图像匹配结束[12]为止。
3 实验
移动机器人在平面上运动,主要分为直线运动和旋转运动,故文中分直线运动与旋转运动对位姿检测系统进行测试。考虑到实际的实验中,移动机器人位姿和速度时,图像采样时间过长(如大于0.5s),则测量的系统的实时性会降低,采样时间过短(如小于0.05s),运动计算算法得到的速度结果误差很大。为了保证位姿计算的实时性及精度要求,摄像机每帧图像采集周期取0.2s。
3.1 直线运动
移动机器人的速度分别设置为40mm/s和80mm/s下的情况进行实验,测试结果分别如图4、图5所示。
由图4、图5的结果可知,测量速度与给定速度基本上趋于一致,多次测量结果求均值与给定值的误差在2%以内。

图4 速度为40mm/s时测试结果
图5 速度为80mm/s时测试结果
3.2 旋转运动
旋转运动主要考虑移动机器人中心绕一个圆心运动的情况,图6表示移动机器人的运动轨迹。移动机器人的旋转速度分别设置为20r/min及80r/min,实验结果分别如图7、图8所示。

图6 移动机器人运动轨迹
由图7、图8的结果可知,测量结果的平均值与给定值的误差在2%以内,可以满足后续深入研究的需要。
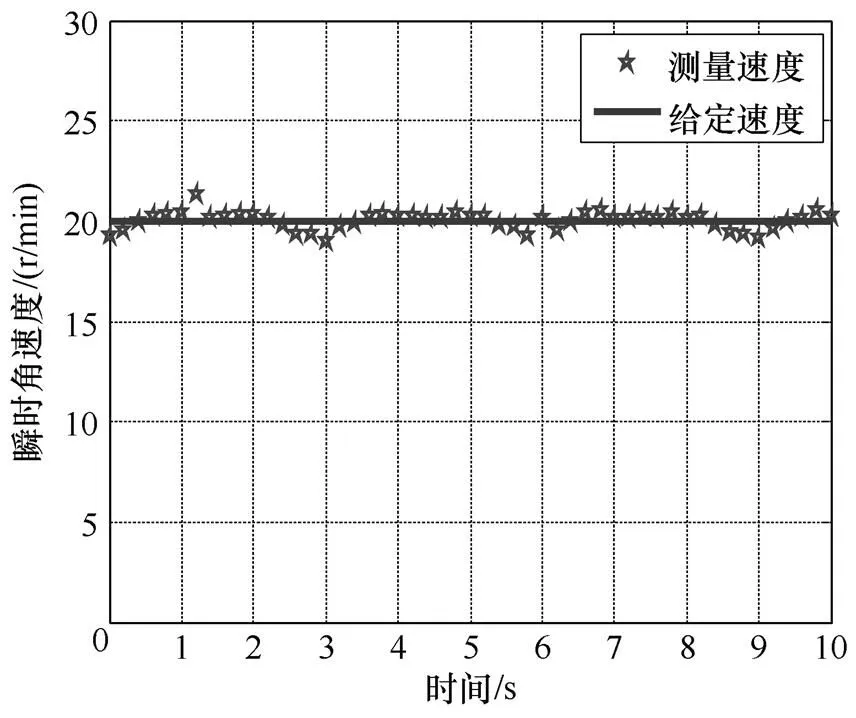
图7 速度为20r/min时测试结果
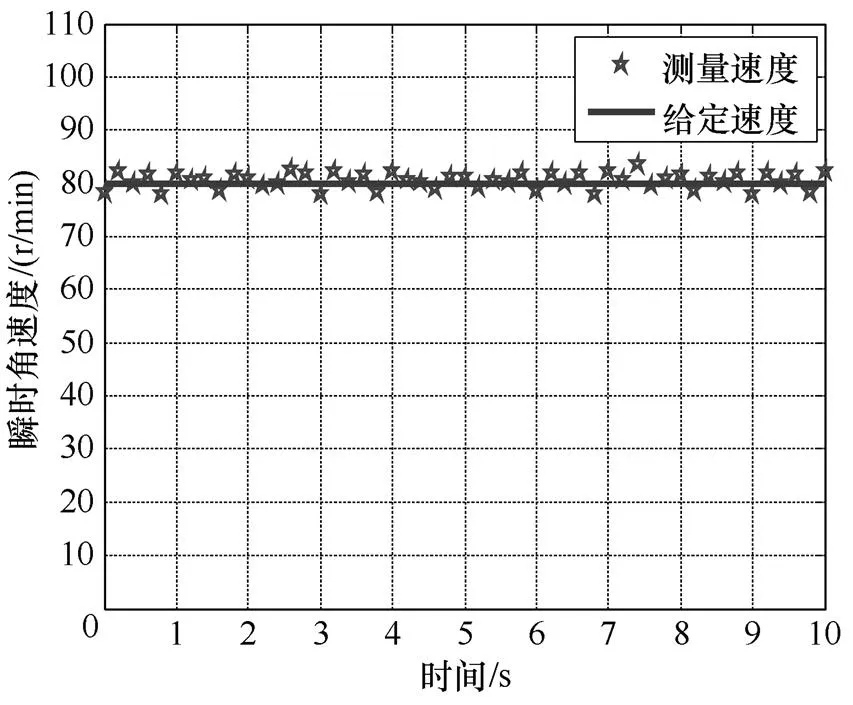
图8 速度为80r/min时测试结果
4 结论
本文提出了用于移动机器人的图像识别及位姿检测系统,分析了基于连续帧图像的移动机器人测速方法。与传统测速方法相比,不受外加设备条件的限制,具有一定的工程推广应用价值。通过优化算法降低了计算的复杂性,提高了实时性,为后续的深入研究打下了基础。
[1] 张鑫, 陈新楚, 郑松. 基于组态方法的移动机器人控制研究和实现[J]. 电气技术, 2014, 15(4): 11-15.
[2] 张红强, 章兢, 周少武, 等. 未知动态复杂环境下群机器人协同多层围捕[J]. 电工技术学报, 2015, 30(17): 140-153.
[3] 尹宇磊. 移动视觉测量机器人任务规划方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2017.
[4] 周智. 基于双目视觉的移动机器人室内三维地图构建方法研究[D]. 黑龙江: 哈尔冰工业大学, 2017.
[5] 崔家瑞, 纪建才, 胡广大, 等. 基于图像的换流站用避雷器仪表识别[J]. 电工技术学报, 2015(S1): 377-382.
[6] 王欣, 孙鹏. 智能变电站中指针式仪表图像自动识别方法[J]. 电气技术, 2016, 17(5): 7-10.
[7] 靳璞磊. 基于智能相机和工业机器人的自动分拣技术研究[D]. 江苏: 南京航天航空大学, 2016.
[8] 钟钜斌. 基于多种导航技术混合的AGV系统设计[D]. 杭州: 浙江大学, 2016.
[9] 余小欢. 基于双目立体视觉的微小型无人机的室内三维地图构建系统的设计与研究[D]. 杭州: 浙江大学, 2014.
[10] 倪健, 白瑞林, 李英, 等. 采用轮廓向量特征的嵌入<式图像匹配方法[j]. 计算机工程与应用, 2012, 50(30): 169-170. p>式图像匹配方法[j].
[11] 马云龙, 夏炯贤, 吴永明. 基于模板匹配算法高速运动分析系统设计与实现[J]. 计算机应用与软件, 2004, 21(7): 52-53.
[12] Singh C, Walia E. Fast and numerically stable methods for the computation of Zernike moments[J]. Pattern Recognition, 2010, 43(7): 2497-2506.
Design and implementation of the mobile robot position detection system
Li Jinxin Zhou Weihua
(Taizhou Vocational & Technical College, Taizhou, Zhejiang 318000)
Considering the large error of the position detection system of the mobile robot and the difficulty of installing the sensor, a system to realize the position detection of the mobile robot by using machine vision was designed. Moving target images were real-time collected by industrial camera. Combined with the LabVIEW development platform, the position information of mobile robot was calculated by pattern matching method. The test system has been developed and tested. The experimental results are basically consistent with the theoretical values and have high accuracy, which lays a foundation for further research.
mobile robot; machine vision; pattern matching; position detection; LabVIEW
2018-05-15
李金鑫(1998-),男,浙江椒江人,主要从事控制工程与智能制造方面的研究工作。
浙江省大学生科技创新项目(2017DKC06)
浙江省教育厅一般科研项目(Y201636417)
台州市科技计划项目(1701gy25)
