基于NURBS曲面叠差分析的桥面变形监测方法
2018-11-16向小菊周志祥
侯 旭, 向小菊, 周志祥, 楚 玺
(重庆交通大学 土木工程学院,重庆400074)
0 引 言
桥梁变形检测[1]是桥梁健康监测的重要组成部分,在大跨径桥梁的常规监测中,其形态变化主要是通过在有限的结构关键点布设传感器进行监测获取变形值,或通过经纬仪、水准仪、全站仪等设备测量选定点位的变形值。传统单点测量方法具有局部性和片面性[2-3],同时整体的变形信息难以获得。
相较于传统的测量手段,车载三维激光扫描可以获取工程实物上任意点的变形量,这对于分析桥梁整体变形有重大意义。三维激光通过获取的结构物表面信息建立结构物的三维模型[4],其测距精度可达到mm级[5]。近年来,有不少研究聚焦于三维激光扫描技术在工程中的应用。刘增良等[6]进行了大型立交桥车载扫描点云数据采集,建立了高精度的三维模型;Park等采用三维激光扫描技术对简支钢梁模型的变形进行试验研究,最大变形量与线性位移传感器直接测得的变形误差为0.16%[7];Riveiro等[8]通过静止式三维激光扫描系统获取了世界建筑遗产中一座石拱桥的真实三维形态,并与数值模拟分析相结合来估计其临界荷载;Soni等[9]针对古建筑拱桥的变形监测,在没有任何设计参数的情况下,采用三维激光扫描技术,对点云数据采用统计非参数方法处理,以获取拱的精确几何尺寸,来分析拱的变形。上述研究集中在三维激光扫描技术在工程结构变形监测中的可行性,其目的大多是获取桥梁的三维模型,而利用地面三维激光扫描技术来对大跨度桥梁的相对变形进行测量还尚未见报道。结构物的安全状态取决于其相对的变形,采用车载三维激光扫描技术测量桥梁路面的相对变形,需要解决两大方面的问题:一方面,针对实际情况制定合理的现场数据采集方案;另一方面,由于原始数据无法直接反映桥梁的相对变形,需要进行数据处理[10]。
本文依托于主跨432 m的特大跨钢桁上承式拱桥为背景,通过车载移动三维激光扫描系统获取桥面形态,并以水准仪的测量结果为基准,验证了该方法在变形监测中的可行性。
1 数据获取方法
1.1 车载三维激光扫描系统
车载三维激光扫描系统是以三维激光扫描仪(Laser Scanner)作为任务载荷传感器,并与搭载平台、定位定姿系统(Positioning and Orientation System,POS)、同步控制系统集成在一个移动平台上,在基于时间同步的条件下,自动给移动平台提供连续的定位信息,同时获取三维地理空间数据的测量系统。采用的POS一般由全球导航卫星系统(Global Navigation Satellite System,GNSS)和惯性导航系统(Inertial Navigation System,INS)组合而成[11],为移动式三维激光扫描系统提供位置、速度和姿态基准。既使面临GNSS信号失锁或多路径的城市峡谷,INS仍能提供精确、可靠的定位定姿数据,保证在任何位置都能不间断地进行移动数据采集。在车载移动测量中,三维激光扫描仪在垂直于汽车行驶方向作二维扫描,以汽车行驶方向作为运动轴,构成三维扫描系统。目的在于获取沿着车辆行驶方向的连续场景扫描点云数据,点云中的每个数据点包含地理空间中的三维坐标数据和回波强度信息。为了实现均匀采样,对扫描点的均匀性需要严格控制[12]。车载移动式三维激光扫描系统组成图如图1所示。

图1 车载三维激光扫描系统组成图
1.2 车载三维激光扫描方案
对大宁河大桥整体进行桥面几何形态数据扫描,分别记录下时间、温度、湿度。每次采集数据的路线都是按照桥跨来回通车线路进行一次完整的采集。车载三维激光扫描行进路线如图2所示。

图2 车载三维激光行进路线
本次桥面线形监测主要针对主桥线形,测点数据直接从三维激光扫描点云数据中提取和分析。按桥梁纵向共划分为左侧、中间、右侧3条测线(L、M、R线),每条测线17个测点,全桥共设51个桥面线形测点。桥面线形测点布置详见图3。

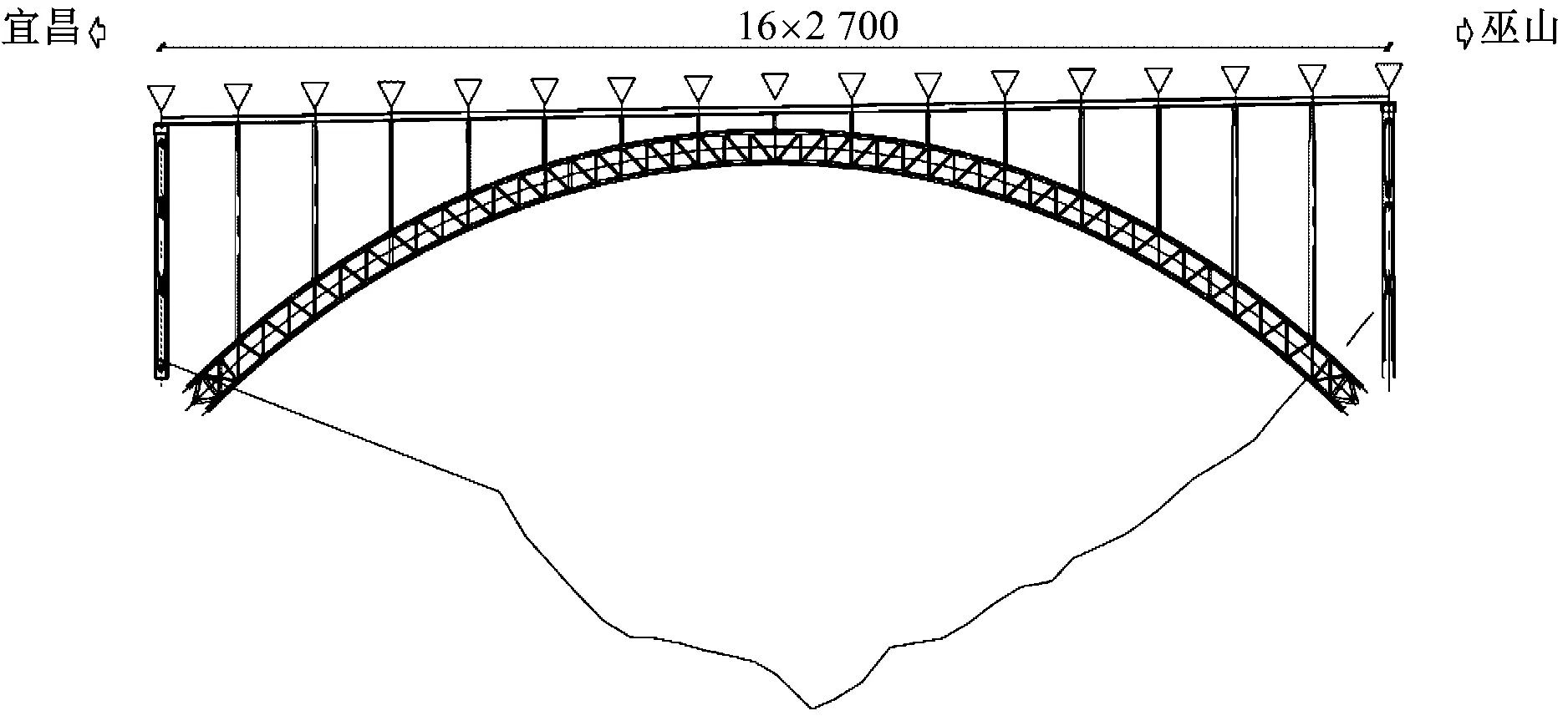
图3 桥面线形测点布置图(mm)
桥梁变形监测对各监测内容对应的测试条件(温度、湿度、交通状态等)进行了相应测试与记录。桥面全息变形、桥面线形均在桥面交通不封闭、车辆影响较小情况下测试所得,具体详见表1。

表1 各监测内容对应测试条件一览表
1.3 对比数据获取方案
1.3.1监测方法
桥面线形观测采用NA2徕卡精密水准仪(精度0.1 mm)配合铟钢尺,按照《国家一、二等水准测量规范》(GB/T12897—2006)二等水准观测方式进行测量,水准观测的视线长度、前后视距差和精密水准仪重复测量次数均符合规范中对“二级精密水准仪”的要求。在测量前,首先对水准仪i角进行检查,将基准点与桥面线形观测点组成闭合环线,按照奇数站“后-前-前-后”、偶数站“前-后-后-前”的观测顺序测量,并对观测成果进行平差。
1.3.2测点布置
该桥2014年9月布测初始监测基准点,在现场测试之前对基准点高程进行复核,保证基准点高程准确性。该桥共布设4个平面控制点,控制点均采用不锈钢测钉,冲击钻在地面钻孔后使用植筋胶植入,并用红油漆进行标识。控制点平面示意图见图4,同时该桥还布设了4个高程控制点。控制点均采用不锈钢测钉,冲击钻钻孔后使用植筋胶植入,并用红油漆进行标识,高程控制点示意图见图5。平面控制点以及高程控制点平面示意如图6所示。




图4 平面控制点




图5 高程控制点
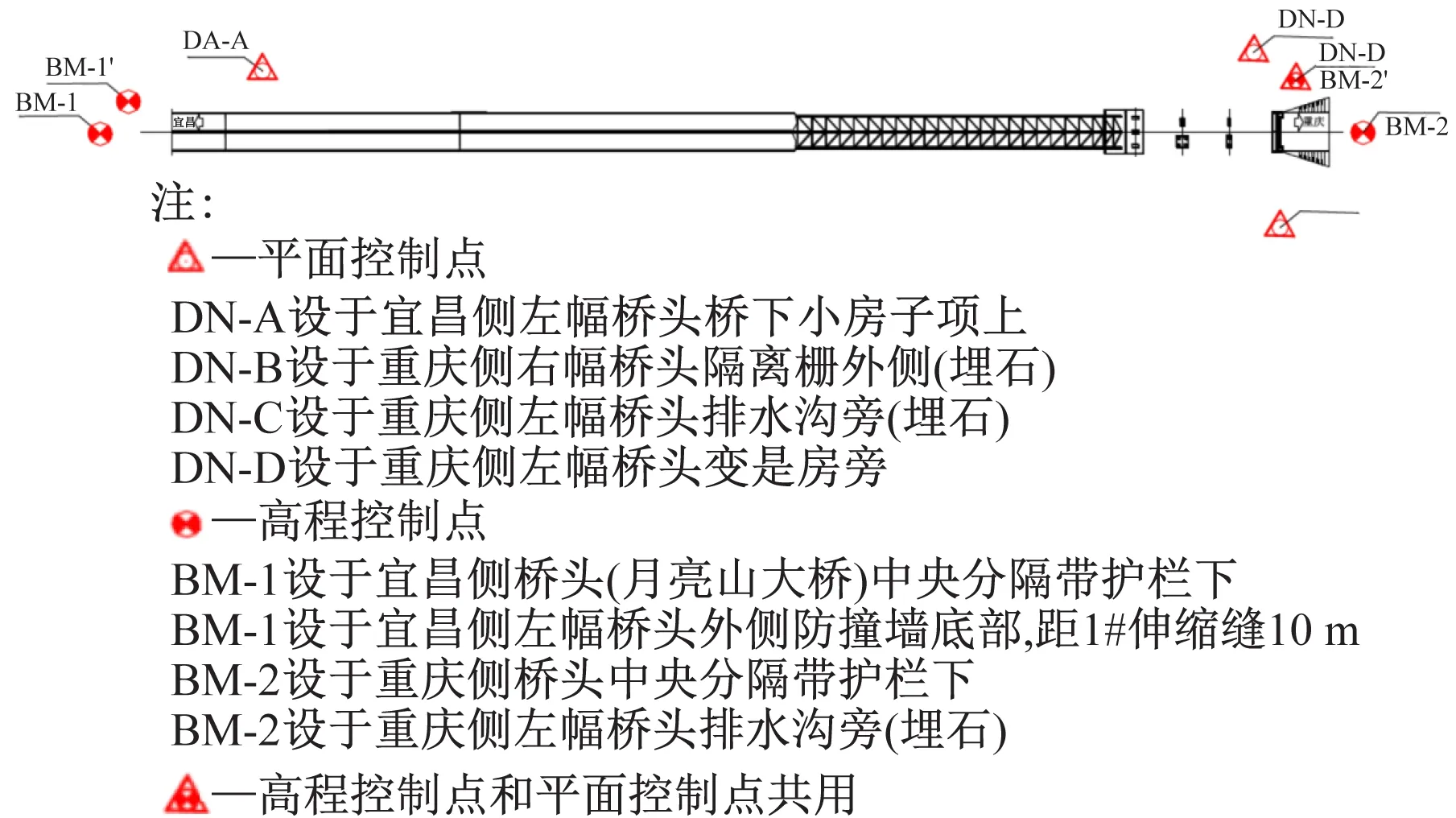
图6 平面控制网及高程控制点平面示意图
2 数据处理原理
2.1 NURBS曲面
曲面重构是将离散点云数据重构生成连续曲面的过程,对于车载三维激光扫描获取的桥梁点云数据而言,其曲面重构的精度需要满足桥梁的变形监测要求,这就对曲面重构的算法提出了更高的要求。
针对这一需求,提出了基于NURBS曲面重构算法的桥梁曲面构造方法。NURBS曲面可以精确地表示二次规则曲线曲面,从而能用统一的数学形式表示规则曲面与自由曲面,而其他非有理方法无法做到这一点;另外NURBS曲面具有可影响曲线曲面形状的权因子,使形状更易于控制和实现;最后NURBS曲面方法是非有理B样条方法在思维空间的直接推广,多数非有理B样条曲线曲面的性质及其相应算法也适用于NURBS曲线曲面。NURBS曲面具有优良的局部形状控制能力和几何不变性,具备桥梁点云的曲面重构及变形分析能力,在复杂曲面建模技术领域得到越来越广泛的应用。
NURBS曲面的定义为[13]:
(1)
u∈[0,1]
式中:Vi,j(i=0,1,…,n;j=0,1,…,m)为给定特征网格顶点的位置矢量;Wi,j为对应顶点的权因子。其中,基函数递推式为:

(2)
k≥1
(3)
节点矢量两端各有k+1个节点相同,以使曲线通过控制多边形的首末端点,并与首末两边相切。其节点矢量分别为:
U=[u0u0…ukuk+1…ur-k-1
ur-kur-k+1…ur]
(4)
W=[w0w1…wlwl+1…ws-l-1
ws-lws-l+1…ws]
(5)
式中:
u0=u1=…=uk=0
ur-k=ur-k+1=…=ur=1
w0=w1=…wl=0
ws-l=ws-l+1=…ws=1
NURBS曲面用统一的表达式精确地表示了标准的解析形体和自由曲面,既可以调整控制顶点,也可以利用权因子,具有计算稳定、线性变换时的几何不变性等特性。利用这一性质,本文将NURBS曲面叠差变形测量方法应用于大视场的桥面变形测量中。将变形前的NURBS曲面作为原始曲面S0(u,v),设变形后的曲面为S(u,v),NURBS曲面叠差分析模型如图7所示。
通过计算基于桥梁点云数据的NURBS原始曲面上每个关键点的控制向量的位移函数,即可得出桥梁曲面变形的形局部状改变量。利用上述NURBS曲面相关性质,可以实现对三维激光扫描获取的大跨度桥梁点云数据变形进行测量。
2.2 曲面拟合
利用2.1节中的算法,对采集的桥面三维点云数据进行处理,如图8所示在主跨两侧伸缩缝位置挖空。基于八叉树原理[14]建立点云数据的搜索结构。再进行降噪、染色、对齐等一系列处理得到初步处理的点云数据。然后再基于NURBS曲面对处理后的点云数据进行曲面拟合,主跨段路面曲面拟合效果如图9所示。可以清楚看到路面特征[15],如图10所示。

图7 曲面叠差分析模型


图8 主跨两侧伸缩缝位置

图9 拱桥路面点云拟合NURBS曲面图

图10 路面效果图
3 桥面变形分析结果
通过NURBS曲面进行桥跨路面曲线进行拟合,分别将两次得到的三维模型进行3D分析。相比于桥跨的路面变形,桥跨支座处的基础视为不动。在此基础上,对桥跨路面桥面形态变化进行了对比。由于点与点匹配会出现较大的误差,在对齐方式上采用基于特征对齐。由于L、M、R三条线提取得到的结果差不多,提取M线上点的数据进行分析。
桥跨路面对齐完成后,两个桥面对应点之间的距离转变为温度作用下路面的变形数值,综合各点的变形值大小将路面划分为不同颜色段的桥跨路面变形色谱图[16],见图10。色谱对比以27 ℃下的桥面形态为基准,分别与22.7 ℃、15.1 ℃、7.6 ℃下的桥面形态进行对比。由此可知,扫描测量得到的桥跨路面色谱图能够反映路面上任意点的变形量,这对于整体变形分析意义重大。桥面全息变形与水准仪数据结果对比分析如图11所示。在变形色谱图的主桥跨中位置,如图3中M处,以0.5 m×0.5 m为范围分别均匀提取若干个点的变形值,并取其平均值作为主桥跨中变形值,对比结果如表2所示。

(a)27 ℃与22.7 ℃桥面相对变形

(b)27 ℃与15.1 ℃桥面相对变形

(c)27 ℃与7.6 ℃桥面相对变形
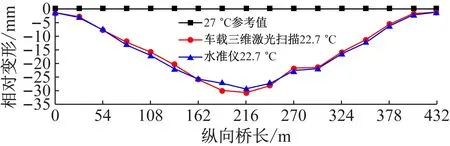

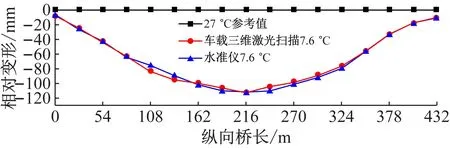
图11 沿桥纵向长度相对变形

4 结 语
本文提出并成功实践了针对特大跨桥梁(432 m)利用车载移动三维激光扫描系统进行桥梁变形监测的方法。首先从车载激光扫描数据中提取了大宁河大桥的NURBS曲面物理参数,通过对变形前后NURBS曲面位移函数的叠差求解,获得了大宁河大桥桥面的整体变形色谱。通过与常规测量方法比较得知,基于NURBS曲面控制点的曲面变形测量方法能够正确反映大跨度桥梁桥面的整体变形和线性变形,其测量误差在10%以内,基本满足工程测量要求。通过研究和试验,证明了车载三维激光扫描技术在大跨度桥梁变形监测中应用的可行性,为桥梁变形监测采用新技术提供了理论依据,同时为车载三维激光扫描技术的发展开辟了新的途径。