跨坐式单轨车辆的耦合转向架
2018-11-16任利惠黄有培孙达力
任利惠 黄有培 冷 涵 孙达力
(1. 同济大学铁道与城市轨道交通研究院,201804,上海;2. 北京维时正喜科技有限公司,101300,北京//第一作者,教授)
目前,我国的跨坐式单轨车辆类型主要有日立模式和庞巴迪模式,两者的差别主要体现在走行部。
日立模式的单轨车辆采用两轴转向架,具有2对走行轮、4个导向轮和2个稳定轮,悬挂系统采用空气弹簧,车体与转向架之间的纵向力采用橡胶堆传递[1]。由于使用了两轴转向架,日立模式单轨车辆的承载能力较强,在单轨车辆中运量最大。但两轴转向架也造成客室地板面距轨面较高,车辆高度尺寸大。
庞巴迪模式的跨坐式单轨车辆采用单轴转向架,转向架设置1对走行轮、4个导轮和2个稳定轮,悬挂系统采用沙漏型橡胶弹簧,牵引装置采用空间4连杆结构,不仅传递车体与转向架之间的纵向力,同时抑制转向架的点头运动[2]。单轴转向架配合车体设计,实现了客室的低地板化,降低了车辆高度。
不论日立模式还是庞巴迪模式的跨坐式单轨车辆,由于其车体均直接坐落在二系悬挂之上,通过曲线时依靠二系悬挂的纵向变形来适应车体与转向架之间的回转角度,则二系悬挂会对转向架产生回转约束,使得走行轮在圆曲线上均不能处于径向位置[3-4]。
研究表明,走行轮侧向力、侧偏角和侧倾角是影响走行轮偏磨的主要因素[5]。当走行轮不能处于径向位置时,势必将产生侧偏角和侧偏力,从而引起走行轮的偏磨。减小侧偏角能够明显地减小走行轮的偏磨。导向轮的径向力是评价跨坐式单轨车辆曲线通过安全性的主要评价指标之一[6],减小导向轮的径向力能够提高曲线通过的安全性。
为了克服现有日立模式单轨车辆的双轴转向架和庞巴迪模式单轨车辆的单轴转向架在曲线通过时不能处于径向位置的缺点,本文提出了跨坐式单轨车辆的一种新型转向架——耦合转向架。将两个相邻车体下的单轴转向架通过回转弹簧联系起来,通过设置合理的回转刚度,可以使得耦合转向架的走行轮在圆曲线处于径向位置,从而消除走行轮的侧偏力和回转力矩,同时减小导向轮的径向力,提高车辆的曲线通过性能。
1 耦合转向架
1.1 耦合转向架方案
跨坐式单轨车辆耦合转向架的原理如图1所示。将相邻两个车体下面的两个单轴转向架用提供摇头回转刚度的耦合机构连接,使之成为一种介于两轴转向架和单轴转向架之间的新型转向架,称为耦合转向架。

1——车体I;2——车体II;3——走行轮;4——导向轮;5——稳定轮;6——二系悬挂;7——耦合机构
1.2 耦合机构方案
图2给出了跨坐式单轨车辆耦合转向架的耦合机构的一种实现方案[7]。耦合机构采用两个扭杆弹簧的组合结构。在相邻的两个单轴转向架的端部各布置一个扭杆弹簧,两个扭杆弹簧通过纵向布置的拉杆连接,由扭杆弹簧提供耦合回转刚度。
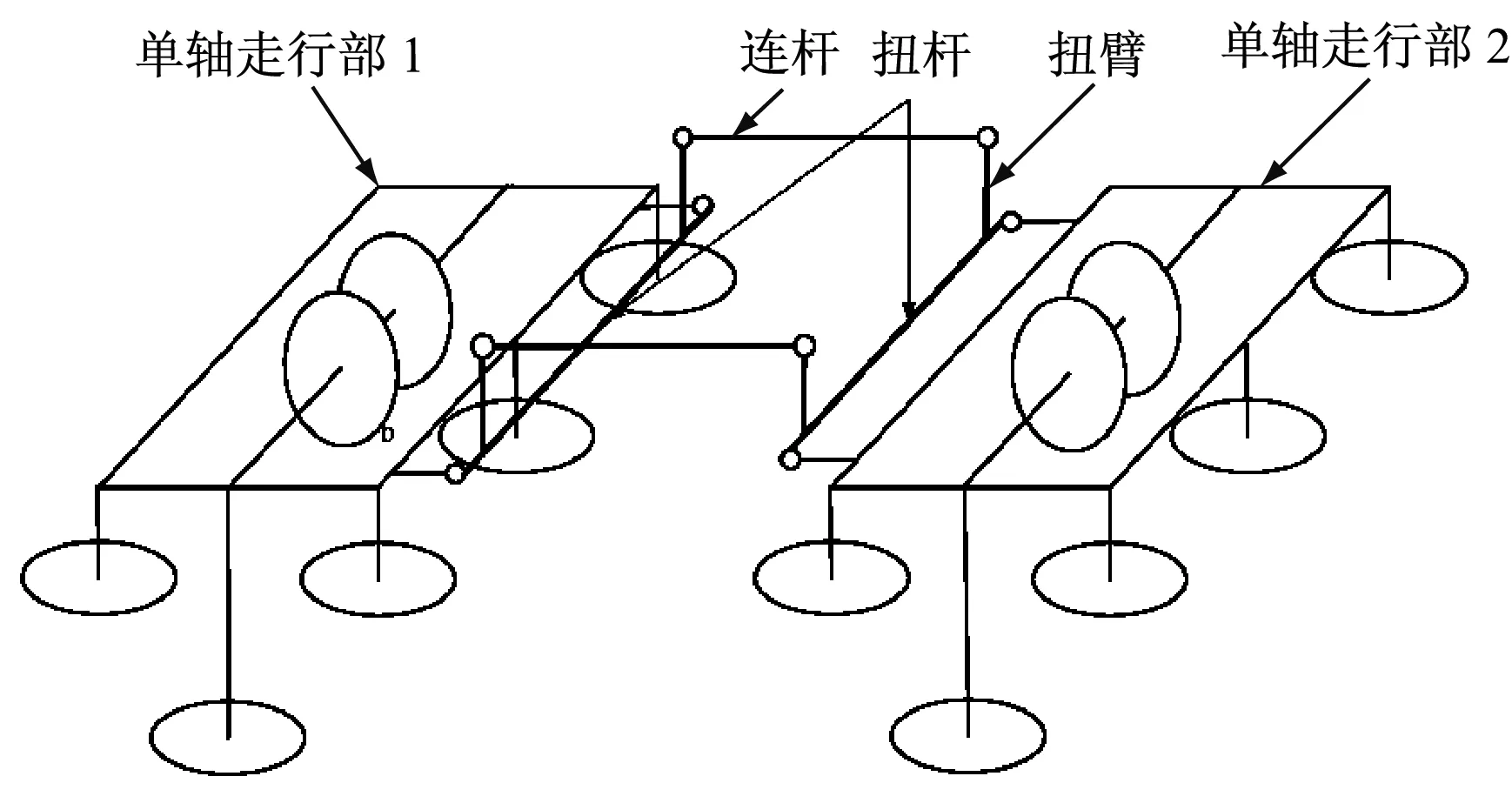
图2 耦合机构方案
上述耦合机构方案具有以下特点:①耦合回转刚度易于调整,耦合机构的回转刚度可以通过调节扭杆的长度、扭臂的长度、扭杆杆身直径来调整;②整个机构随动性好,对转向架其它自由度的运动影响小;③故障导向安全,耦合机构中无论扭杆、扭臂还是连杆,一旦损坏,则整个耦合机构立刻失效,耦合转向架变成单轴转向架,不会产生其他负面影响。
庞巴迪模式的单轴转向架只要经过简单改造,加装上述耦合机构,即可成为耦合转向架。
2 曲线通过性能
2.1 耦合刚度的理论值
单轴转向架的走行轮通常固接在构架上,所以在理论分析时,可把走行轮和构架看作一个整体处理。以耦合转向架其中一个单轴走行部为例,当转向架在圆曲线上处于稳态时,其摇头运动的力平衡方程为:
Mgt+Mrt+Ms+Mc=0
(1)
式中:
Mgt——导向轮提供的摇头力矩;
Mrt——走行轮的回正力矩;
Ms——二系弹簧产生的摇头力矩;
Mc——耦合弹簧产生的回转力矩。
当转向架在圆曲线处于径向位置时,走行轮的摇头角Ψt=0,这时Mrt=0,Mgt=0,因此有:
Ms+Mc=0
(2)
由于悬挂系统的横向变形比车辆的名义定距2L小得多,可认为车体的中央部分近似与圆曲线相切,这时单轴转向架与车体的摇头角β=L/R(R为曲线半径,L为车辆定距之半),则二系弹簧产生的摇头力矩为:
Ms=2b2Ksx·L/R
(3)
式中:
b——二系悬挂的横向间距之半;
Ksx——二系悬挂的纵向刚度。
同理,当转向架处于径向位置时,相邻两个单轴转向架之间的摇头角为2α=2a/R,其中a为耦合转向架的前、后走行轮的纵向间距之半,则耦合弹簧产生的回转力矩为:
Mc=Kφ·2a/R
(4)
式中:
Kφ——耦合弹簧的回转刚度。
将式(3)、(4)代入方程(2),可以得到耦合转向架在圆曲线处于径向位置时,耦合回转刚度与二系弹簧纵向刚度之间的关系:
(5)
当Kφ与Ksx满足式(5)时,耦合转向架的前、后走行轮就能在二系弹簧和耦合弹簧的共同作用下趋向径向位置。
2.2 动力学仿真
在UM软件中建立图3所示编组型式的跨坐式单轨列车的动力学模型。模型包括3个车体和4个转向架,其中2个端部转向架采用单轴转向架,2个中间转向架采用耦合转向架,参数选自文献[8]。

图3 列车编组型式
图4给出了耦合转向架以均衡速度通过半径为100 m、超高率为12%曲线的仿真结果。可以看出:在圆曲线上,耦合转向架的摇头角近似等于零,这时耦合走行轮的侧偏力和回转力矩也近似等于零,耦合转向架走行轮以径向姿态通过圆曲线,明显减小走行轮的偏磨;在圆曲线上,耦合转向架所有导向轮的径向力近似相等,都接近初始预压力,这说明耦合转向架可明显减小导向轮在圆曲线上的载荷,提高通过曲线的安全性;在圆曲线上,耦合弹簧的力矩和二系悬挂的摇头力矩大小相等,方向相反。
根据图4的仿真结果可以画出耦合转向架在圆曲线的受力状态,如图5所示。由于二系弹簧所产生的摇头力矩正好被耦合弹簧的耦合力矩所平衡,这时前后走行轮处于径向位置,走行轮的侧偏力和

a) 转向架摇头角
回正力矩为零;导向轮的载荷仅由未平衡离心力引起,轨道梁同侧的各个走行轮的径向力相等。
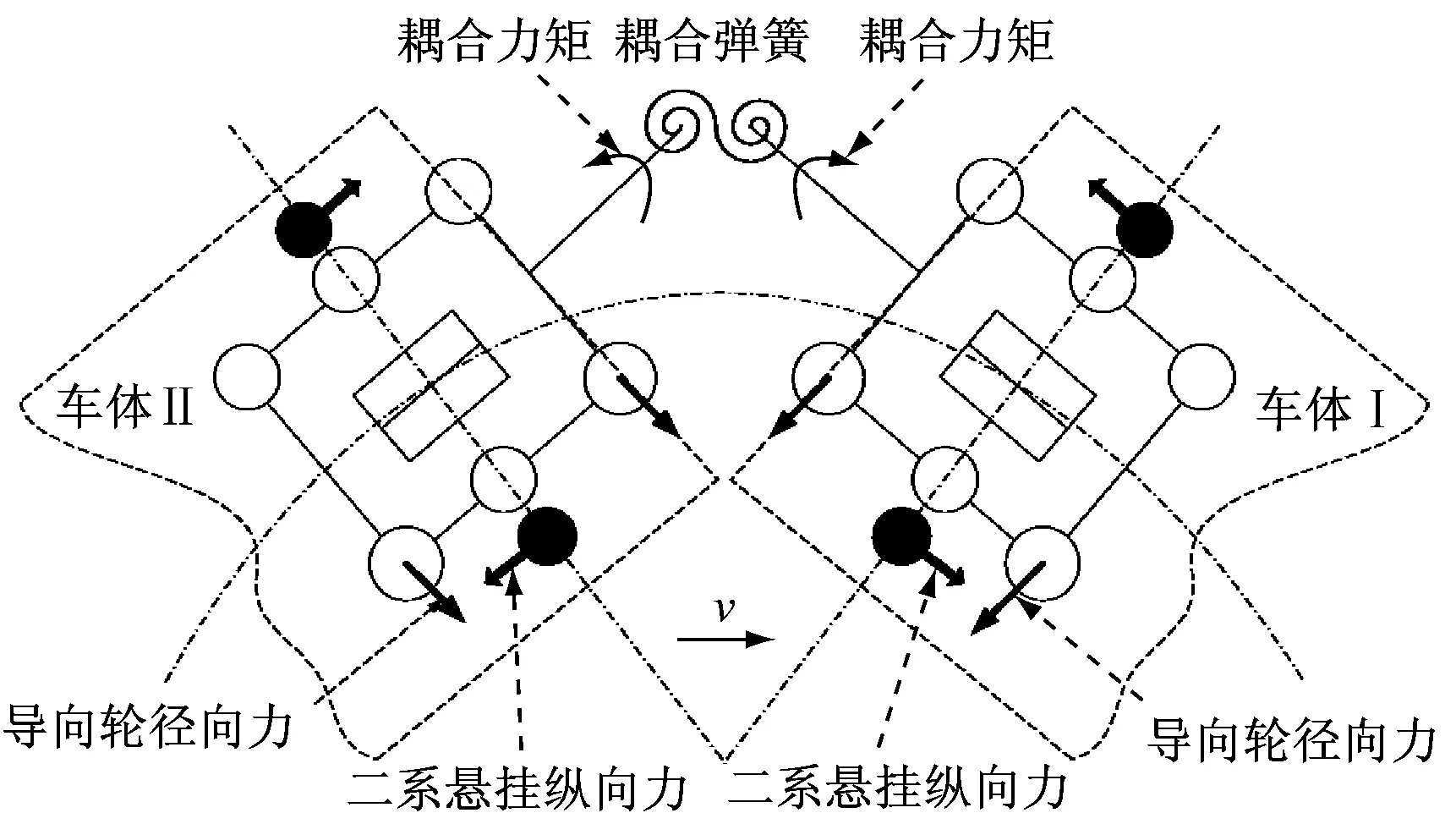
图5 耦合转向架在圆曲线的受力状态
3 结语
本文提出了一种新型的跨坐式单轨车辆转向架方案,将相邻车辆的两个单轴走行部通过回转刚度耦合在一起构成耦合转向架。只要设置合适的耦合回转刚度,耦合转向架的前、后走行轮在圆曲线上能处于径向位置,从而消除走行轮的侧偏力和回转力矩,减小走行轮通过曲线时的偏磨;同时可减小导向轮的径向力,增加车辆的运行安全性。
耦合转向架克服了两轴转向架和单轴转向架曲线通过的缺陷,具有良好的曲线通过性能,其为跨坐式单轨车辆的发展提供了新的解决方案。
