太阳能智能车运动模型设计
2018-11-16
天津冶金职业技术学院 电气工程系,天津 300400
一、引言
现代社会中,监控设备应用广泛。市场上有很多的监控设备,但都具有一定的局限性,一般为固定的、机械式的、不能移动的监控设备。要想实现不同区域不同位置的监控,就必须安装多台设备,如此一来,成本高昂、布置复杂、智能化程度低。
本文给出了一种可移动的太阳能智能车系统的设计,该系统以太阳能智能车为核心,可以通过搭载的监控模块对周围环境信息进行监控(如采集和监控气体浓度,检测温度、湿度、有害粉尘等环境参数)。太阳能智能车在运行过程中可将传感器采集到的数据和现场情况实时发送到上位机或手机中,还可通过上位机或手机远程实时控制太阳能智能车的运行及机械手抓取物体。系统以太阳能作为辅助电能,大大增强了续航能力,还具有节能、低碳、环保等特点。
本文重点介绍了系统的运动模型并编制了软件程序。太阳能智能车可代替人工进入人类不便进入或对人体有害的工作生活环境中,实施高频率、高精度的监控工作,并可通过加载不同模块进行其它功能的扩展,还可广泛应用于居家安保防盗、养老院、物流车间、商场智能巡逻、远程特种作业等领域,应用前景广泛。
二、监控系统框图
监控系统的整体框图如图1所示。监控系统以太阳能智能车为核心,主要由单片机控制模块、传感器模块、太阳能电池板模块、循迹模块、手机WIFI控制模块、测距、循迹、避障模块、机械手控制模块、显示模块等组成。监控系统利用太阳能电池板将光能转化为电能,储存在高性能蓄电池中,利用此电能作为系统的辅助电源,可大大增强其续航能力;传感器负责采集相应信号交给单片机处理,处理结果可通过无线WIFI网络传送到上位机或手机;高清摄像头采集到的作业环境情况可通过无线WIFI实时传送到上位机或手机。监测系统在运行过程中可实现指定信息的监测以及避障、循迹、测距、报警、远程控制机械手抓取监测物等功能。各功能模块的功能如下:

单片机核心控制模块:监测系统采用的处理器是基于ARMCortex-M3内核的32位STM32F103VET6单片机。单片机作为监控系统的控制核心,接收控制信号,处理采集的各种传感器检测信号,控制各个模块统一协调工作。
传感器模块:可根据用户需求选择加载不同类型的传感器,负责采集各路传感器信息交给单片机处理;
高清摄像头模块:负责实时采集作业环境的视频画面,可通过手机或上位机实时视频监控;
报警模块:采集信息超出阈值,发出警报,将信息传送到手机或上位机;
手机控制模块:可通过无线WIFI与太阳能智能车通信,编制了手机的控制软件,通过手机控制软件可实时视频监控作业环境情况,还可控制太阳能智能车的行进方向和模式,变换运行速度、控制机械手臂抓取监控物;
计算机控制模块:太阳能智能车可通过无线WIFI与上位机通信,编制了上位机控制软件,功能和手机控制端类似;
测距模块:测距功能主要采用相应的算法通过前置的多对超声波传感器实现;
自动循迹模块:监控系统的车体下方有一组循迹红外线传感器,主要作用是使系统可以沿着设定好的轨迹自动行驶;
避障模块:采用了红外避障传感器实现,传感器发出相应信号,当信号遇到障碍物时反射回来,被接收器收到,使监控系统能准确避障;
显示模块:LCD可显示太阳能智能车距离障碍物的距离,并能显示车体运行状态;
电机驱动模块:采用电机驱动芯片L298N控制车体电机的转动。L298N为单块集成电路,高电压、大电流、四通道驱动,可直接对电机进行PWM控制,无须隔离电路。输出电压最高可达50V,可以直接通过电源来调节输出电压;可以直接用单片机的I/O口提供信号,而且带有使能端,方便PWM调速,电路简单,性能稳定,使用比较方便;
太阳能电池板:采用光伏技术,将光能转化为电能,储存在高性能蓄电池中,利用此电能作为监控系统辅助电源,大大增强系统的巡航能力。
三、监控系统的运动模型
监控系统的功能是由软硬件共同决定的。在硬件确定之后,监控系统的智能化运行主要依靠软件实现。通过软件设计可将不同类型传感器采集到的信号数据有效地处理,并通过主控芯片产生相应的动作,实现不同的功能。由于篇幅所限下面主要介绍监控系统应用的运动模型。
1、监控系统差速运动模型
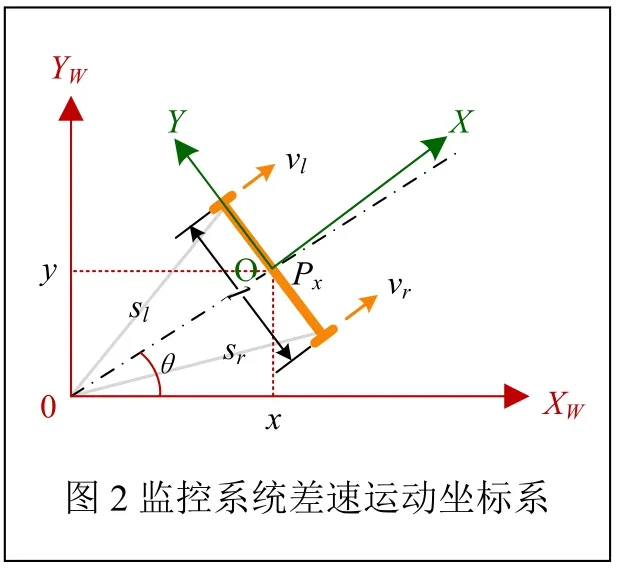
监控系统的运动控制,采用了四个直流电机驱动轮控制的结构,其中前面两个主要采用差速驱动方式,后面两个作为从动轮,主要用作支撑平衡。车体的运动是以其满足刚体运动特点和规律作为前提的,建立了如图2所示的坐标系,其中(X,Y,O)为移动坐标系,(XW,YW, 0)为世界坐标系,PX为系统的前进方向。
监控系统运用移动机器人运动学的相关理论和方法对其运动方式进行控制,主要运用了正运动学和逆运动学的知识。其中正运动学用来解决系统运动轨迹的问题,也就是根据系统的运行速度来计算其运动轨迹。比如在二维空间系统的位姿坐标为(x,y),则可以利用两个差动轮的速度(vr,vl)来计算其位姿,具体计算公式为:
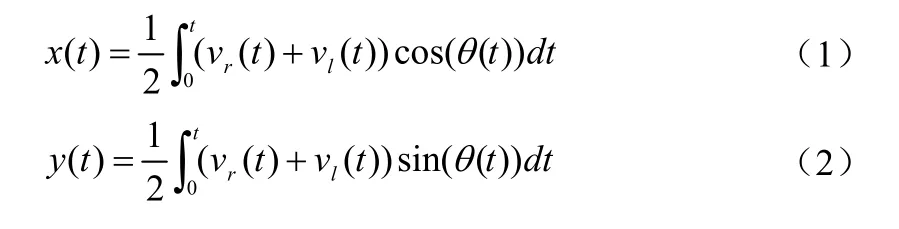

其中,l—前两驱动轮间的距离;
r—驱动轮半径;
vr—右前轮速度;
vl—左前轮速度。
逆运动学主要用来确定运行速度,即在运动轨迹和位姿已知的情况下,怎么求两轮差动速度(vr,vl)。在系统运行过程中直线和圆弧运动是最基本的,因此主要分析这两种情况。
(1)直线运动
如图3所示,如果左右两轮运行速度一致,这里面包括大小和方向两方面,则系统的运动轨迹很显然是直线。
图3中,当t=0时,两坐标系(XW,YW,0)与(X0,Y0,P0)重合,经过时间t后,系统运动到(Xt,Yt,Pt)的位置,如果左右两轮的速度一致,由公式(3)可得:

将其分别代入公式(1)、(2)得:

(2)圆弧运动
如图4所示,系统必须满足一定条件其运动轨迹才能为圆弧。通过图中轨迹可知,其条件可归纳为系统左右两轮的速度差必须保持恒定不变,方向相同并且在运行过程中速度不能变化。因此,时间t=0时,图4的两坐标系重合,经过时间t后运动到(Xt,Yt,Pt)。如果左右两轮的速度大小不一致,当右轮大于左轮时,运动轨迹在一、二象限,当右轮小于左轮时,运动轨迹在三、四象限。


当左右两个轮子的方向、速度值保持不变且速度差恒定时,由前面的公式(3)有:
乔瞧也把藕挑起来了,不过,她挑起来的藕都是断的。踩藕人见了,就说:“乔瞧你不要踩了,你踩出来的藕都断了,卖不出好价钱。”


求定积分得:


由公式(8)有:

由公式(9)有:

由公式 sin2α+cos2α=1,则有:

公式(12)可更改为圆的标准方程:

2、运动控制参数的确定
假定拟合方程式为:

其中,a、b、c—未知数;
v—监控系统做直线运动的速度;
D—相应的占空比。
那么通过实验,选取三组(v,D)不同的值,则可以求得a、b、c的值。

以vl=10cm/s,l=9.17cm为例,计算得出Δv=2.02cm/s,所以右轮的速度vr=12.02cm/s,进而根据式(14)可算出对应的驱动右轮的PWM占空比。
实际监控轨迹是不规则的,但是任何不规则的轨迹都可以用直线和圆弧的无限叠加来实现,不再赘述。
四、监控系统下位机主程序流程图
本设计主要给出了下位机的设计流程,完成的主要功能有系统初始化、车体运行状态的监测,包括检测太阳能智能车在运行过程中是不是能沿着设计好的路线自动循迹行走,能不能自动避障,能不能根据采集的不同传感器信号自主处理。下位机主流程图如图5所示。
流程描述:系统初始化设置,太阳能智能车体沿着设定好的轨迹自动循迹行走同时开始采集各路传感器信号。如遇到障碍物,则通过避障传感器使单片机相应位置位,自动进入避障处理中断程序;车体在运行过程中根据采集的传感器检测信号分辨出是哪路信号,使单片机的相应位置位,自动进入传感器中断处理程序。以单片机为核心的控制系统可实时检测系统的运行状况并进行相应处理。
五、试验结果
图6 为太阳能智能车的实物图。通过手机WIFI可控制太阳能智能车的所有运行情况,包括运动模式的选择,是手动还是自动;基本的运行如前进、后退、左转的、右转。还可以利用手机控制控制车体的运行速度。通过实验检测可实现如下功能指标:


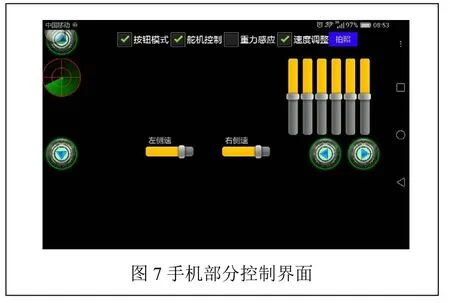
通过手机控制可使系统沿着设置好的轨迹自动或手动循迹行驶;在行驶的过程中可以自主壁开障碍物;超声波传感器可以测量前方物体3cm~80cm的距离;可自由控制机械手臂张开、闭合、向上、向下,并能夹取物体,向上5cm,向下5cm;LCD可显示太阳能智能车距离障碍物的距离,并能显示车体运行状态。编制了比较完善的手机WIFI控制界面,可以自由连通手机和太阳能智能车,界面尺寸12cm×8cm。手机部分控制界面如图7。
六、结论
本文给出了一种太阳能智能车系统的设计,该系统可通过搭载的监控模块对周围环境信息进行监控。系统可应用于室内外各种工作生活环境的监测,并可通过加载不同的模块进行其它功能的扩展。系统在运行过程中可将采集到的数据和现场环境情况实时发送到上位机或手机中。系统以太阳能作为辅助电能,阳光充足是可实时充电,大大增强了续航能力,符合国家倡导的节能、低碳、环保的产业方向。给出了监控系统的运动模型,应用运动模型编制了软件程序,给出了太阳能智能车的实物图和手机端软件界面,车体可通过无线WIFI和上位机或手机实时通连,结果表明监控系统具有较好的环境适应能力。
