并排四足步行椅机器人设计研究
2018-11-14张彦陟
张彦陟
(闽南理工学院 光电与机电工程学院,福建 石狮 362700)
步行机器人近年来有了很大发展.尤其四足仿生机器人,一直以来都是研究人员关注的焦点问题.四足仿生机器人的结构,以美国Bigdog为最成功也是最典型.国内对于四足机器人结构的研究[1-4]以及步态的研究[5-7],多数都是针对这种结构.不过,四足机器人结构,四条腿的分布,基本上都是仿爬行动物结构.也就是按前后、左右方式分布.(图1、图2)

图1 美国BigDog

图2 山东大学Scalf
这种结构稳定、灵活、能在复杂的地面行走.在山地搬运货物具有极大优势.但一个无法克服的缺点是:上、下坡时背部总与地面坡度一致.如果货物没捆紧,就有可能滚落下来.
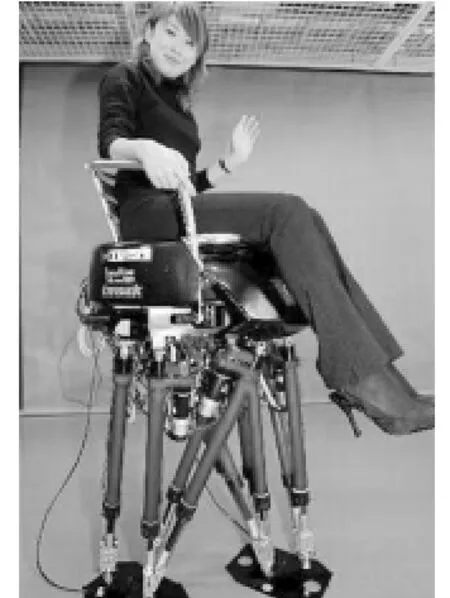
图3 日本WL-16
作为步行机器人的一个分支,步行椅机器人近年来也得到了快速发展.日本早稻田大学高西研究室研发了世界上第一台并联腿机构两足步行椅机器人WL-16,(图3).是由一只铝制椅子焊接在两组可伸缩的金属杆上构成的.这两组金属杆被螺丝分别固定在两块平板上,使得能像脚一样的行走.随后国内一些单位也开展了研究[8-9].不过,目前所研制的载人步行椅机器人腿部机构,支撑的金属杆虽多,也只能算是双足,其稳定性总难让人放心.而且由于没有膝关节,大大影响了其上下楼的可靠性.
本文从另一个角度来设计步行椅.用两个双足步行机器人组成一个步行椅.采用并排四足步行机构.由大腿、小腿和足部组成.能载人行走,上、下楼、在不平的地面上行走.智能化后能避障或自动选择行走路线.可用于行动不方便的人或载物在有台阶或崎岖的路上行走.[10]
这种构思来自生活中常见的抬石头工作.我们来看二人抬石头的情形.二人抬石头,一根扁担架在二人肩上,石头在中间,横走时,二人分立左右两边;竖走时二人一前一后排列.任一瞬间,每人至少有一只脚在地上,也就是说,任一瞬间,步行椅至少有两只脚在地上.这样,总有一个方向不用考虑稳定性,只需考虑一个方向.另外,再考查二人的排列方式,二人抬石头,可以横走,也可以竖走.(图4)

图4 二人抬石头情形
多数情况下一般采取横走方式.因为竖走容易绊脚,而且上下坡时石头会偏向一头,使得那一头不好迈步.因此,只有在特殊情况下(比如路太窄)才会采用竖走方式.横走的好处是:分列左右的人迈步不受影响;上下坡时所抬的石头不会影响抬的人.当然,缺点是路不能太窄.并排四足结构正是模仿二人抬石头的横走方式.
为了解决膝关节的问题,提出了一种全新的结构.其特点是采用了大腿和小腿分别驱动的方式,大大简化了结构,而且控制更灵活,容易实现智能化.
1 并排四足步行机构
1.1 腿部结构
人的肢体活动由骨骼、关节和肌肉共同完成,不同的运动形式,骨骼、关节和肌肉的组合结构也会有不同.如图5为手部结构.图6为全身的结构.可以认为,骨骼主要起到支撑作用;肌肉主要起到发力使关节弯曲的作用.

图5 手的骨骼、关节和肌肉

图6 全身的骨骼、关节和肌肉
本文提出的结构就是根据骨骼与肌肉的组成原理.原理如图7所示.

图7 机器人腿部结构

图8 腿部结构几何关系
图中,OB、BC为支撑杆,OB可视为大腿骨;BC可视为小腿骨.AF和ED为可伸缩杆,可视为大腿与小腿的肌肉.A、O、E、F、D 均为铰链联结;OBF 为固定角度;DBC为固定的三角形.于是,AF的伸缩,导致OB绕O点转动,可视为大腿抬起与放下;ED的伸缩,导致DBC绕B点转动,可视为小腿抬起与放下.AE可绕O点转动,其转动角度取决于AF与ED的长度及C点的状态.当C点固定时(着地时),AF、ED的长度决定了AE与地面的角度及O点坐标;当C点悬空时,AF、ED和O点坐标决定了C点的位置.
由图5和图6中可看出,人体的手、脚关节的转动,其实都是在一个平面上进行的,要扭转,必须由其他关节来实现.因此,本文提出的结构,也限制在一个平面内转动.
1.2 腿部各点位置关系
由图8,总可以推导出O点与C点的相互位置关系.
设从O点引出一条水平线OP,则有:

式中AF为变量,其余均为常量
B点坐标确定后,就可解出三角形OBC.即可求出C点相对于O点的位置关系.上式在EB确定之后,只有一个变量ED.

综上所述,要求得O点与C点的位置关系,只有二个变量.LAF和LED于是
设当以C点为坐标原点时,O点坐标:

则当C点悬空时,即以O点为坐标原点时,C点坐标

由(1-4)和(1-5)可以看出,无论是 O 点还是C点,都可用f(LAF,LED)函数表示.只是坐标符号相反.
由图7还可看出,驱动AF与ED分别连接臀部AOE的A点与E点.这样,AF与ED的变化,都可控制AOE与OP的角度变化.这就韵味着,AF、ED在控制C点坐标变化的同时,又能控制AOE即上身的倾斜变化.
1.3 双足并排情况
为了方便分析,将图7结构用简化图形(OBC)表示,则双足并排可表示为图9:
双足并排时,O点重合,假定OB1C1为前脚,OB2C2为后脚.站立时,C1、C2处于不同位置,而O1、O2却位于同一点.虽然 O1、O2位置相同,但坐标原点却分别是C1、C2.下述的脚标xy表示在xy平面内考察.
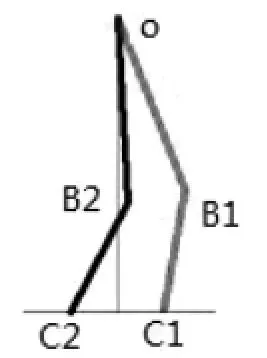
图9 双足并排简化

图10 后足抬起

图11一后足放下
O1x,y=f(L1AF,L1ED);C1xy=0;O1相对于C1的坐标
O2x,y=f(L2AF,L2ED);C2xy=0;O2相对于C2的坐标
虽然O点重合,但相对于不同的坐标系,其值是不同的.对于C点,当C点抬起时:
C1x,y=-f(L1AF,L1ED);C1抬起时以O1为原点
C2x,y=-f(L2AF,L2ED);C2抬起时以O2为原点
对于同一个O点,因C1和C2位置不同,LAF和LED就有不同值.
当O点向右平移时,C1、C2的x坐标向左移动;
当后脚(C2)抬起后还要向前移动,C1固定在地面,作为坐标原点,O2与O1重合,C2相对于C1的坐标可以表示为:

同样地,当轮到(C1)抬起后还要向前移动时,C2固定在地面,作为坐标原点,于是,其坐标表达式为:

1.4 并排四足情况
将二个双足并排在一起就成为并排四足结构(图 12).

图12 并排四足结构简图
并排四足结构避开了前后排列四足的缺点.前后排列四足的躯干与地面平行,遇到地面倾斜时躯干也跟着倾斜.而并排四足结构躯干垂直于地面,与人的躯干一样,即使遇到倾斜的地面,也能保持直立,因此,特别适合于载人或载物.
本结构由于每条腿都能单独编程,在任何情况下都能使上身直立.
虽然按左右排列的结构是三维空间,我们仍然可以按平面方式描述每只脚的运动情况.只是将Z坐标分别定在左边或右边的O点.
我们还是用O1、O2、O3、O4标记这四只脚的O点.用C1、C2、C3和C4来标记这四只脚的C点,于是有
O1x,y=f(L1AF,L1ED);C1=0;O1相对于C1的坐标
O2x,y=f(L2AF,L2ED);C2=0;O2相对于C2的坐标
O3x,y=f(L3AF,L3ED);C3=0;O3相对于C3的坐标
O4x,y=f(L4AF,L4ED);C4=0;O4相对于C4的坐标
虽然O点重合,但相对于每只脚,有不同的坐标系,其值是不同的.对于各个C点,当抬起时,其坐标分别为
C1x,y=-f(L1AF,L1ED);C1点坐标以O1为原点
C2x,y=-f(L2AF,L2ED);C2点坐标以O2为原点
C3x,y=-f(L3AF,L3ED);C3点坐标以O3为原点
C4x,y=-f(L4AF,L4ED);C4点坐标以O4为原点
虽然O点在xy平面内看是重合的,因C1、C2、C3、C4位置不同,LAF和LED就有不同值.
当 O 点向右平移时,C1、C2、C3、C4 的 x坐标向左移动;
假定C1,C2为左边两只脚,移动时交替迈步,每一瞬间总有一只脚在地上.所以,当一只脚抬起时,坐标原点为另一只脚着地点C.即

假定C3、C4为右边两只脚,移动时交替迈步.每一瞬间总有一只脚在地上.所以,当一只脚抬起时,坐标原点为另一只脚着地点C.即

在此基础上,可以根据不同的步态,编制出移动控制程序.
2 机械设计
图13为步行椅机械设计图.
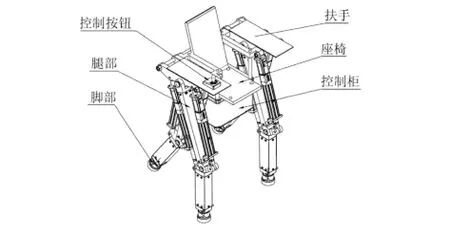
图13 步行椅设计图
机械设计中,以座椅作为躯干.座椅的结构尤为重要.由图12可看出,四个O点虽然深度不同,但其x,y值在运动中应保持一条线.由于各个O点在空间有一定距离,要保持一致,要求座椅结构非常牢固.不至于由于受力点不同而使髋关节(坐椅)发生扭曲.腿部的设计,以大腿、小腿为主干,髋关节和膝关节的设计必须保证旋转时不能扭曲.每个足踝装有压缩弹簧来吸收来自地面的冲击.足底装有橡皮,既能缓冲地面的冲击,又能保护地面不致被破坏.有关参数见表1.

表1 步行椅机器人参数
每只足底还装有压力传感器,使控制中心随时得知任一只脚着地和抬起的信息,并可根据各条腿的压力比例计算出重心位置.
为了验证其原理的合理性,对其行走过程进行了仿真.并将控制接口与仿真软件相连,使得实际控制情况与仿真所见的完全一致(图14).
仿真界面中,上图表示左边两条腿;下图代表右边两条腿.垂直细线代表重心位置.左边的表格显示的是各种参数及数据.以便观察运动过程中这些数据的变化情况.

图14 步行椅仿真控制界面
3 行走试验
样机如图15,步行试验分四个阶段进行:
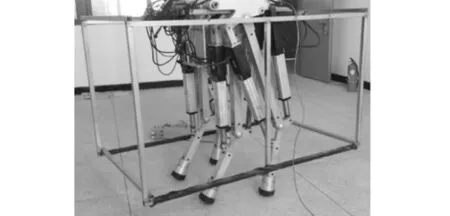
图15 步行椅样机
3.1 对伺服电机控制试验
通过伺服电机控制板,对电机进行控制试验.一方面对电机验收,另一方面熟悉控制指令.然后通过编程,实现对电机的电脑控制.提取相关参数,找出各种状态下控制电机的方法,以确保通过编程对伺服电机的完全控制.
3.2 对单腿结构的原理试验
单腿装配完成后,通过电脑编程,对单腿结构进行原理验证.将仿真情况与实际机构的动作进行比较,找出其中差别,从而纠正仿真软件中或结构中的各种错误.反复修正后,实际的单腿样品动作与仿真软件所表现的动作完全一致.
3.3 对整机联动的控制试验
因为有八只电机需要控制,并且要做到每一瞬间每只电机的动作不同.首先,使仿真软件中的电机与实际接线相对应.然后,使每只脚与仿真软件中的相对应.比如.总体分为左边与右边,每边又有左右之分.就以左左表示左边的左脚;左右表示左边的右脚.余类推.对应完成后,再对整体参数进行调试.比如,仿真要求的站立高度、前后间距、后脚抬起高度等,与实测的相关参数相比较,找出差别来源,进行修正和调整.完全符合后,再进行步态试验.
3.4 对步态的编程试验
行走试验作了以下项目:
3.4.1 站立与行走高度:要求保持步行椅重心不动,足底接触地面的位置不动而使上身的上下移动.站立与行走高度可以设定在一个范围.有两个因素限制了高度范围:一是几何合理性.就是式(2-1)(2-2)要有实数解.二是受力不能超出电机的最大推力.就像人一样,直立是最省力的,半蹲就很费力.步行椅也是同样道理.经过试验,高度可在800mm-1050mm之间设置.
3.4.2 步距设置:在步行椅中,步距不影响行走速度.只是速度快时步距要调大些,速度慢时步距要相对减小.步距大小也受到几何和力的限制.步距愈小愈省力.但太小稳定性就差.这里定为250mm-500mm.
3.4.3 行走步态:行走的步态有许多种.目前编出了二种.(1表示足站立地面;0表示足抬起)
这种方案左右一致,并排迈步(图16).
为了使机器人不倒,要十分注意重心位置的移动.
后脚抬起的时机,应该掌握在重心将近前脚着地点;当后脚迈到前方着地的时机,应该掌握在重
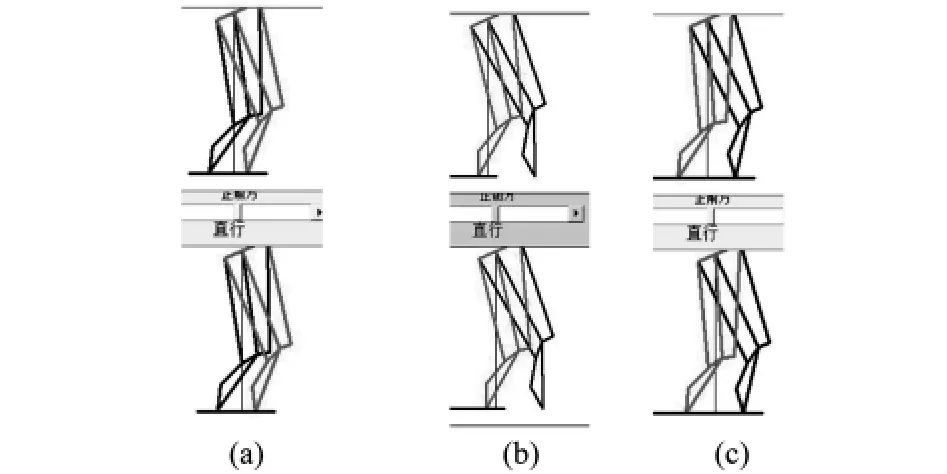
图16 并排迈步
心刚越过前脚着地点.如果后腿过早抬起,会导致步行椅向后倒;如果过晚,则又可能使步行椅向前倒.
如上图中,a.抬脚时,重心接近着地点b.放脚时,重心刚超过着地点c.着地后重心在中间.
这种方案称为蹒跚迈步(图17).

图17 蹒跚迈步
优点是可以确保重心始终在前后腿之间.缺点是,每次只能迈半步.而且上身会左右摇晃.
其他步态方案还在研究中.为了更好地研究步态,还开发了步态研究平台.以便于更好地观察步行时的细节,以便修改步态(图18).
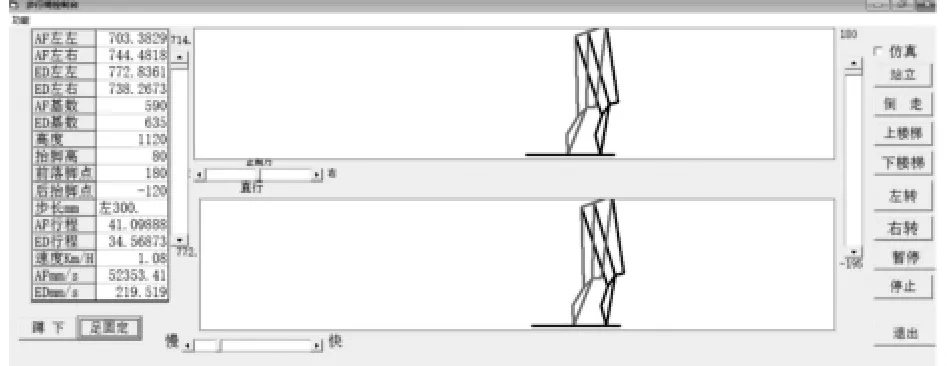
图18 步态分析平台
除了行走试验,还有转弯、变速、上楼、下楼(抬高、下移为定距离)等.所有动作都能通过编程实现.
4 结论
研制了一种新型并排四足步行椅机器人.在腿部结构上,大腿和小腿分别用电机直接驱动,结构简单,控制灵活.在整体结构上,与现有的大多数机器人不同,采用并排方式,模仿人直立动作,在任何情况下都能保持上身直立.能很好地解决行进中的跨越障碍、上下坡时上身倾斜问题.此外,本结构采用直流电源,用蓄电池供电,无噪音,对环境没有影响.而且,随着科技发展,蓄电池容量愈来愈大,续航时间起来越长.直流电机也将向着效率更高、重量更轻的方向发展,将来,并排四足步行椅机器人定会成为老年人喜爱的出行伴侣.
