光电循迹小车的运动控制系统设计
2018-11-08刘文泉朱春燕
刘文泉,朱春燕
(1.西北工业大学自动化学院,陕西西安,710072;2.西安工业大学北方信息工程学院,陕西西安,710200)
1 光电循迹传感器原理
智能循迹小车主要由STC89C52RC单片机开发板、HJIR1循迹模块、L298N驱动模块、电机模块、电源模块等组成,图1是智能循迹小车系统组成。采用STC89C52单片机I/O口控制L298N驱动模块,来控制四个直流电机的运动形态,完成规定黑色线循迹控制。
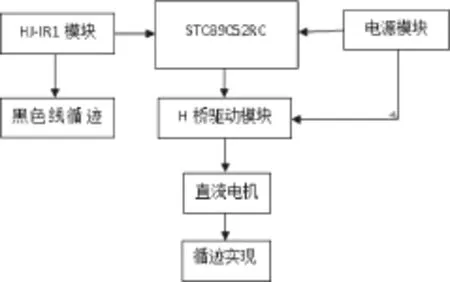
图1 智能循迹小车控制系统组成图
智能小车采用HJ-IR1光电循迹传感器,图2是红外发射管红外光线发射到黑色线时,由于黑色对红外光线的吸收高,因此反射回红外接收管的红外光线相对减少,此时I/O口输出高电平,如果红外发射管反射到其它路面则I/O口输出低电平。
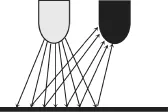
图2 黑色障碍物光路图
2 系统的硬件设计
2.1 单片机电路的设计
STC89C52单片机的最小系统,主要扩展包括:供电电路、复位电路和时钟电路。
2.2 传感器外设电路
光电循迹传感器电路如图3所示。当发射管发出的红外线遇到黑线时,黑线吸收了红外线,导致反射回来的红外线很少,所以光敏三极管不会导通,从电路中可以看出遇到黑线时输出端输出AOUT模拟量在5V,通过比较器比较在输出DOUT数字量高电平1给单片机。
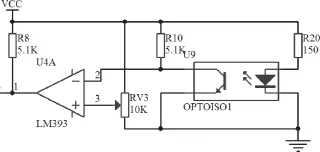
图3 循迹传感器电路图
2.3 电机驱动电路
电机的驱动电路如图4所示,采用L298N驱动芯片带动两个直流电动机进行运转,选用电机是抗干扰碳刷TT减速马达,抗干扰碳刷到电动机的作用是改变DC电机的电流方向。
2.3.1 H桥驱动电路分析
电动机控制电路的双H桥,包括八个三极管和两个马达。在电机运行时,根据三极管的导通情况来控制电机的电流方向。H桥电机驱动电路有三种状态,下面作一路电机的分析。
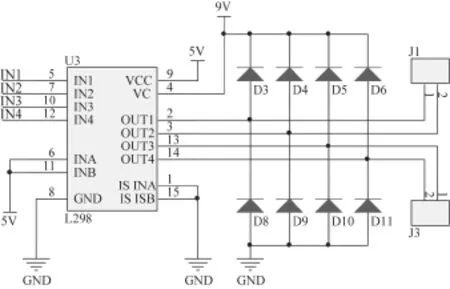
图4 电机驱动电路
状态一:首先ENA是使能端,是控制刹车使用的,IN1、IN2是控制电机的正转和反转。当输入高电平1进入使能端、IN1和IN2输入低电平0时,ENA和IN1的信号通过两个与门电路给三极管T1输送一个低电平0,而给三极管T2输送一个高电平1,三极管T2导通而三极管T1不导通。所以电机没有电流进入,从而直流电机不工作。
状态二:使能端还是给高电平1让其使能工作,然后给IN1输入高电平1,IN2输入低电平0,使得三极管T2和T3不导通,而三极管T1和T4导通,这样使电机反转。
状态三:分别给ENA、IN1、IN2输入高电平1、低电平0、高电平1,其使得三极管T2和T3导通,三极管T1和T4不导通,电机正转。
所以通过一路电机的分析我们可以得出四路电机的工作状态,在编写程序的时候怎样给芯片定义高低电平决定了小车的运动状态。
2.3.2 小车运动控制逻辑
小车在L293D驱动芯片控制下可以得到电机控制逻辑:当使能端ENA为高电平时,如果给引脚IN1输入低电平而给引脚IN2输入为高电平,则电机正转;如果引脚IN1输入高电平而引脚IN2输入低电平,则电机反正转;IN1和IN2都输入低电平时,电机停止。表1是小车的运动逻辑。
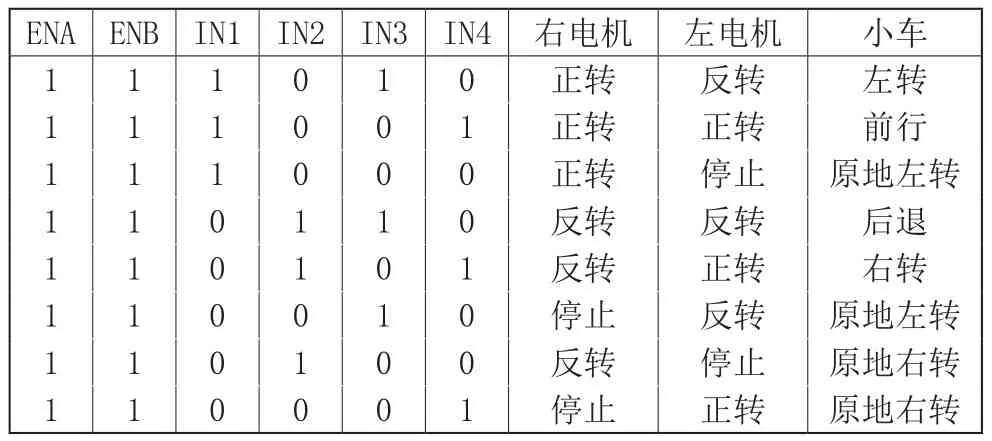
表1 小车运动逻辑
3 系统的软件设计
设计采用C语言编译。该方案使用软件设计的模块化结构。光电循迹小车的主程序流程如图5所示。
图6所示为小车的状态,红色代表传感器,黑色代表循迹路线,直行时传感器的电平为00100 。当单片机读到P1口的低四位为00100时,就执行直行函数。
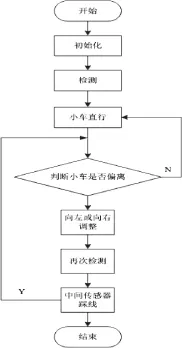
图5 主程序设计流程图
小车的向右偏移的四种状态。四种状态则分别对应程序里面四种函数:
若P1口低四位状态=01100,小车轻微向左偏离轨道,则执行向左微转函数;
若P1口低四位状态=01000,小车中度向左偏离轨道,则执行向左中转函数;
若P1口低四位状态=11000,小车严重向左偏离轨道,则执行向左大转函数;
若P1口低四位状态=10000,小车马上向左偏离轨道,则执行向左死转函数。
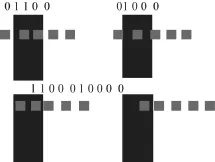
图6 小车向右偏移
小车的向左偏移的四种状态。四种状态则分别对应程序里面四种函数:
若P1口低四位状态=00110,小车轻微向右偏离轨道,则执行向右微转函数;
若P1口低四位状态=00010,小车中度向右偏离轨道,则执行向右中转函数;
若P1口低四位状态=00011,小车严重向右偏离轨道,则执行向右大转函数;
若P1口低四位状态=00001,小车马上向右偏离轨道,则执行向右死转函数。
4 系统调试
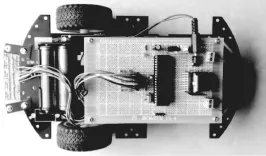
图7 小车实物图
在安装好小车之后首先要检查电源线、信号线、元器件引脚之间有无短路等情况。以小车前进为例,通电之后观察小车轮胎的转向,如果一个或者两个轮胎都反转,则接线错误,需要调整接线位置;如果轮胎不转,则说明接线没有导通,要重新接线检测,重新接线之后还不能转动,则说明直流电机坏了或者程序出现错误,可以通过换电机进行调整。小车原地打转或者前进时候冲出跑道,不能正常循迹,可以通过调节红外传感器的可调电阻,改变传感器灵敏度,及传感器距离地面的高度。安装调试完成之后实物图如7所示。在软件调试过程中,利用ISP软件调试,支持计划刻录编译和调试软件WAVE 6000。
5 总结
本课题研究的智能小车的循迹系统,能够实现按照预定轨道沿着黑色标记线运动。保证光电传感器的正常灵敏的工作,使小车不受到外界干扰而偏离黑线运动;并保留了扩展功能,方便以后的扩展和进一步的开发。
