基于共享RAM的电动机保护装置的设计
2018-11-08洪广焦
洪广焦
(正泰电气股份有限公司,上海,201614)
0 引言
随着集成电路技术的快速发展,ARM,DSP芯片大量应用于微机保护。其中以DSP+ARM[1]的双核硬件架构为主流。将管理和保护等功能分开,ARM实现人机交互、与上位机通信等功能;DSP实现电气量的采集、变换、逻辑运算、控制等功能。这样的系统特点是功能按CPU分,能够实现故障定位到板,开发保护功能方便,但不易实现测量功能,各CPU间连接线多,会影响系统的可靠性,近几年国内外出现多CPU用LVDS总线链接,实现每个插件实现各自功能,因而维护检修方便,但是总线抗干扰能力强,设计要求高,成本也高。不适合35KV及以下的网外市场,而本文提出了一种,利用共享快速存储并采用集成测量芯片的架构实现电动机保护装置的设计方案,他继承了一部DSP+ARM的功能按CPU分的优势,又摆脱了设计LVDS的设计难度,同时实现低成多CPU之间快速数据传输。
1 电动机保护装置系统设计
电动机保护装置采用了DSP+ARM+计量芯片的机构设计,CPU之间通过共享FRAM实现数据传输。从而减少处理器和存储器的线路连接便于功能删减。而计量芯片作为ARM的外设通过SPI读取数据。为了实现功能模块化,芯片按功能被定义为管理芯片,保护芯片,测量芯片。芯片又可分细分为人机界面模块、上位机通信模块、校时间模块;保护芯片包含采样模块,数据处理模块、保护逻辑模块;测量包含测量数据和计量数据。
这其中,最难的是保护。因为保护芯片中的数据处理模块和逻辑模块,包含了模型保护。它是指采用前沿的电机保护理论实现电机的等效保护。如反时限过流算法,过热保护等。状态检测模块可分为电机运行状态和电机外围电路状态,通过监测电机以及外围电路的状态实时准确的实现电机保护,减少误动作。
电动机保护装置保护功能主要包含、过流、零序过流、反时限、低电压保护、过电压保护、过负荷、启动时间过长、负序过流、过热保护,本文重点介绍核心保护算法反时限和过热保护。
2 硬件模块系统化设计
动机保护装置硬件采用了STM320F107作为管理芯片,TMS320F2802[2]作为保护芯片,ATT7026A作为测量芯片。所有芯片功能都可划分为输入,处理,输出三个过程模块。其中输入可分为人机接口输入、数据输入为、模拟量输入和开关量的输入,处理可分为显示处理、保护功能处理和测量功能处理,输出可分为人机接口输出,通信数据输出、保护动作和信号输出。
其中,管理芯片模块、保护芯片模块和测量芯片模块都由各自的最小系统构成,相互之间通过共享RAM实现如图1所示。
电动机保护装置的采样电路,主要是采集电机运行的三相电流、三相电压、零序电流、零序电压等模拟量和多路开关量等。模拟量采集电路主要由互感器和A/D芯片构成,开关量采集电路主要由降压电阻和光电隔离元件组成如图2所示。

图1 显示模块电路框图
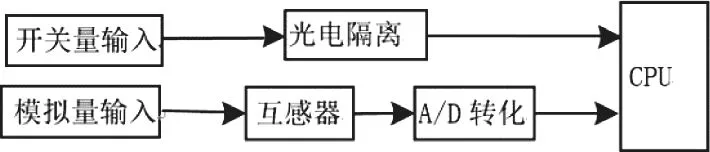
图2 采样电路原理框图
电动机保护装置采用了共享RAM的方式实现保护芯片和管理芯片的数据传输如图3所示。

图3 CPU 系统电路原理框图
电动机保护装置的控制电路主要由保护跳闸电路和信号开出电路组成,保护跳闸电路主要由继电器和防互锁路组成,信号开出电路主要由开出信号继电器组成如图4所示。
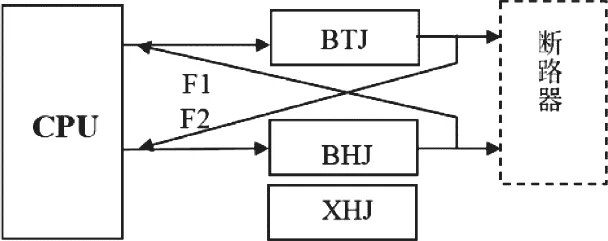
图4 开出电路原理框图
BTJ——保护跳闸继电器;BHJ——保护合闸继电器;XHJ——信号继电器;F1、F2——互锁反馈信号。
3 软件核心算法设计
3.1 标准反时限保护的实现及测试对比
反时限保护,是电动机保护中很重要的保护方式之一。它是随过流值的增大而减少动作延迟时间的一种算法。这种保护方法的准确与否和反时限计算的准确有着密切的关系。目前行业内设四种模式的相电流反时限保护。但是标准反时限是最难准确实现,如式1所示:

其中,k -反时限系数;Is -启动电流。
目前行业内实现反时限算法主要由三类,直接数据存储法、曲线拟合法、神经网络法。最常见的是直接数据存储法。就是先通过现场试验得到反时限过流跳闸数据。随着电流增加跳闸时间减少的一组离散时间数据,通过查询存储表的形式来做跳闸判断。这种方法的特点是计算量小,可靠性高、容易实现。缺点是数据量大,一般在低压保护中使用。神经网络法是一种解决非线性关系的有效算法,但是由于算法复杂度大,不适用于微机型嵌入式保护装置。而曲线拟合法是目前微机保护最适合采用的反时限保护算法。首先IEC明确的反时限保护算法模型,就是采用这种算法描述。国内等标准基本性能指标用IEC25[3],因此只要我们所设计的产品满足IEC反时限标准,就是满足国标。现详述保准反时限速实现。经过研究,目前采用两种方法来实现。
方法一是通过存储 f (I) = ( I Is)0.02每隔一定的间距,存储数据,然后用线连接这些数据点实现。这种方法实现简单,运算速度快(都是一次函数),缺点是动作时间精度稍低,存储数据量大,应用于380V和660V低压电动机保护可以满足需求(反时限动作保护最高只要求做到8倍)。
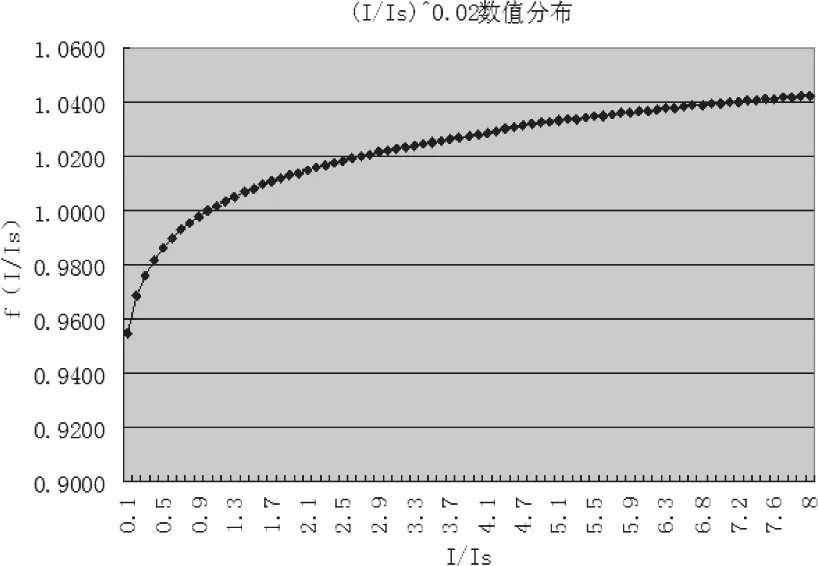
图 5 I/Is0 02 数值分布图
从图5可以看出来,3倍电流以前,曲线的斜率比较大,而随着倍数的增加曲线数据斜率越来越小,也就说明3倍电流以后数据变化不大,因此编程中可以利用这一特性减少预先存储表的大小,4倍前采用0.1为间隔,4倍后采用0.5为间隔。
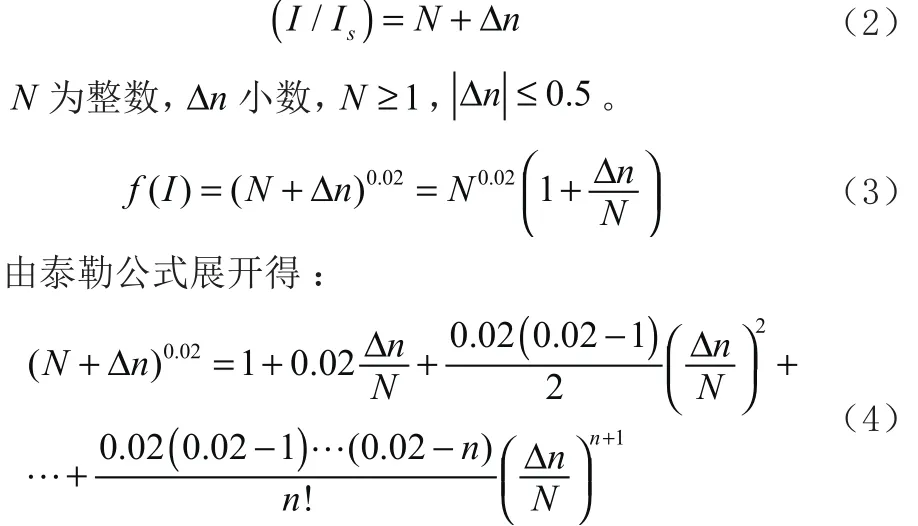
方法二是通过泰勒展开。因为 f (I) = ( I Is)0.02项,在反时限过流保护启动并累加积分的过程中 I >Is=>IIs> 1 。可以 I Is分解成一个整数和一个纯小数的,如式(2~4)所示[4]:
反时限时间误差,国标要求满足±5%(1-I/80×IB)或±40ms(I为动作电流值,IB为基准电流),或动作电流I与计算电流Ic误差:土2.5%或土0.02In,Ic由动作时间经反时限公式计算值[6]。
测试条件:测试温度为20℃,相对湿度为55%,K=100,启动电流为1A。测试结果见表1[7]所示。

表1 一般反时限过电流保护测试数据
3.2 过热保护实现及测试对比
目前普通的电动机保护器,缺乏对电动机运行的环境或电动机本身的热容量等因素的影响.电动机是否需要保护其根本的判断依据应该是电机绕组温度是否超过其绝缘等级温度,在相同电流的情况下,对于环境温度高的电机其烧毁的可能性显然要大于环境低的电机,这就说明单纯通过电流的大小来判断电机是否跳闸并不是十分科学的,不能达到对电机在各种环境下的完全保护容易产生误动或拒动.基于这些原因,对电机绕组的温升特性实行数学建模、仿真,设计出电机绕组的合适温升模型非常必要。电动机过热保护是指电动机在故障运行时会产生热量超出了电机本身的承受,造成电机的不可逆烧毁,把电动机看成是一个等效电流的发热体,我们可以根据物体发热原理,通过电流等效设计以电流为变量的温升方程。如图6,定性示意了电机温升过程。

图6 电机动机在不同状态温升示意
过热保护跳闸后,装置的热记忆功能起动,禁止电动机再启动。跳闸接点和过热动作信号接点保持动作状态,直到热积累衰减到规定值才返回。紧急情况下要求立即起动,可通过装置的热复归开入量强制将热积累值清零。
过热保护传统算法中,假设异步电动机在额定工况时处于热平衡状态,向环境散热功率始终等于此时的铜损热量等效值 Δ PN=,而在过负荷情况下,时间Δt内,铜损热量等效值 Δ Pov=,引起定子绕组温升Δθ,如式(5)所示:

式中,Cr导体的热容量;C导体的比热容;m导体的质量。
对应于过负荷电流,Is=Iov/IN,在允许温升Δθ=θmθN下的允许过负荷时间t,如式(6)所示:

式中,θm,θN分别为定子最大允许温度和额定工况温度。
因为实际过负荷温升过程中的散热大于ΔPN,允许过负荷时间将大于上式中的t,故在(6)式中引入修正系数α,它与定子绕组的温升、散热特性有关,一般α=0.05,则修正后的反时限特性,如式(7)所示:

式中,Is是当前电流和额定电流的比值;α引入修正系数。A还可以通过不同电动机实际运行的热负荷算出来,一般可根据电机的热特性保护曲线计算,或由电机厂商提供。
在实际应用中发现,电动机产生的热量还和负序电流有关,尤其是负序电流大的生产环境中,负序过流产生的热量比正序电流产生的电流还要大几倍。因此,在过热保护中,新算法考虑到电动机正序电流和负序电流产生的综合热效应、热积累过程和散热过程,引入了等值发热电流 Ieq,如式(8)所示:

式中,K1= 0 .5,启动过程中,防止电动机正常启动中保护误动;K1= 1 .0,启动结束后;K 2 = 3 ~10,负序发热系数,模拟 I22的增强发热效应,一般可取为6;I1-正序电流分量;I2-负序电流分量。
保护动作方程,如式(9)所示:

式中,Ieq-电动机等值发热电流;Ie-电动机额定电流;τ1-电动机热积累定值,即发热时间常数;t-动作时间。
散热时,当电机停止时,其散热按指数衰减是按停机时发热等效值乘 e-t/T其中:T为电动机散热时间常数。当电机正常运行时(包括电机在某段时间内过载,温度上升,但未到跳闸,其后电机又恢复正常运行的情况),稳态发热等效值等于实际电流除以额定电流乘以额定等效值。当前发热等效值等于稳态发热等效值加超过稳态发热等效值按指数衰减后的值。当运行时,散热时间常数是停机时的一半。当电机运行电流超过过载保护定值电流时,其热等效值按电流的平方关系增加,在此期间只计算发热,即热容只增加,不衰减。当发生保护跳闸后,其发热等效值按指数衰减,当前发热等效值等于跳闸时发热等效值× e-t/T。当热积累设定值时,过热保护动作跳闸后,不能立即再次起动,要等到电动机散热到热报警水平的50% 以下时,才能再起动。
低电压电动机保护装置中,过热保护又被称为过载保护,和中、高压中的继电保护中所称的过热保护原理一样,是通过建立电流和电机发热的关系实现电机过热测量,并实现保护跳闸的一种保护。
测试条件:测试温度为20℃,相对湿度为55%,K1=1,K2=6启动电流为1A。测试结果[7]见表2所示。
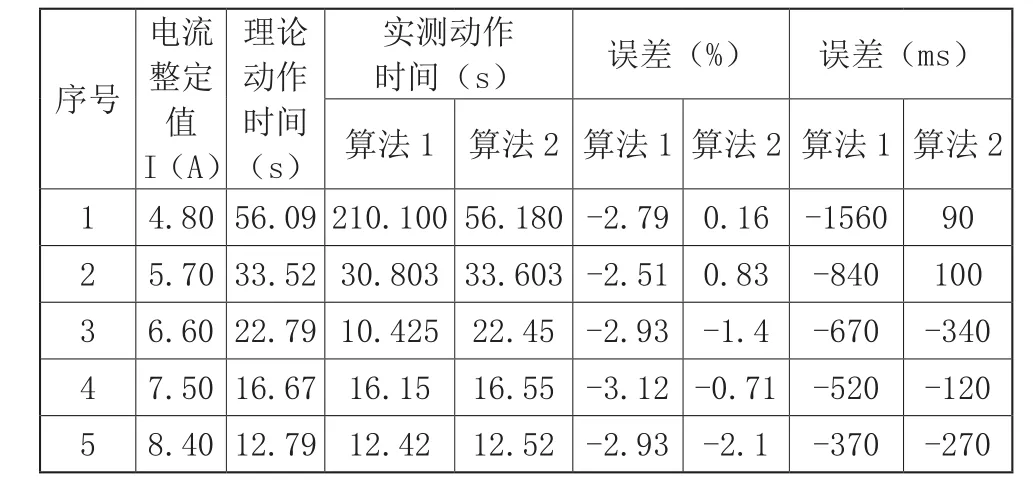
表2 过热保护动作时间测试数据
4 结论
本文通过学习研究目前行业内外电动机保护技术,研发了一款适合本公司市场需求的电动机保护装置。尤其对行业内存在的技术难点做了深入的研究。
