三轴气浮卫星实验平台研制
2018-11-08李伟,员海,刘磊
李 伟, 员 海, 刘 磊
(西北工业大学 航天学院, 陕西 西安 710072)
当前,我国在“新工科”建设的背景下[1-2],迫切需要地方高校培养具有创新创业能力和动手实践能力的航天工程科技人才,我国航天专业教学方式面临着巨大的挑战。一方面,各高等院校“重课堂、轻实践”的思想观念根深蒂固,导致输送给相关航天单位的人才和工程实践活动脱节[3]。另一方面,航天工程的相关实验往往需要模拟空间飞行器的姿态运动,这就必须实现对空间微重力环境的模拟。有一些学生从本科阶段就开始从事飞行器设计或制导控制等相关专业的学习、研究,但是直至博士阶段,都很少接触实际的飞行器控制系统和相关的测试、仿真评估方法,进入工作单位后,这种状况严重制约了他们的研发活动。
鉴于此,我们针对航天专业本科生的培养特点,搭建了一套气浮卫星实验平台。该平台利用压缩空气,在气浮球轴承和底座球窝之间形成一层气膜,使得模拟航天器浮起,从而实现失重环境下的低摩擦力学环境,进而可以利用气浮转台开展飞行器的姿态控制系统实验,同时对实验条件建设、实验内容的组织与实施开展全面地探索。
1 实验平台设计及组成
气浮实验卫星系统共包括气浮系统、机械系统、测量系统、控制系统、执行系统和电源系统等6个部分,如图1所示。
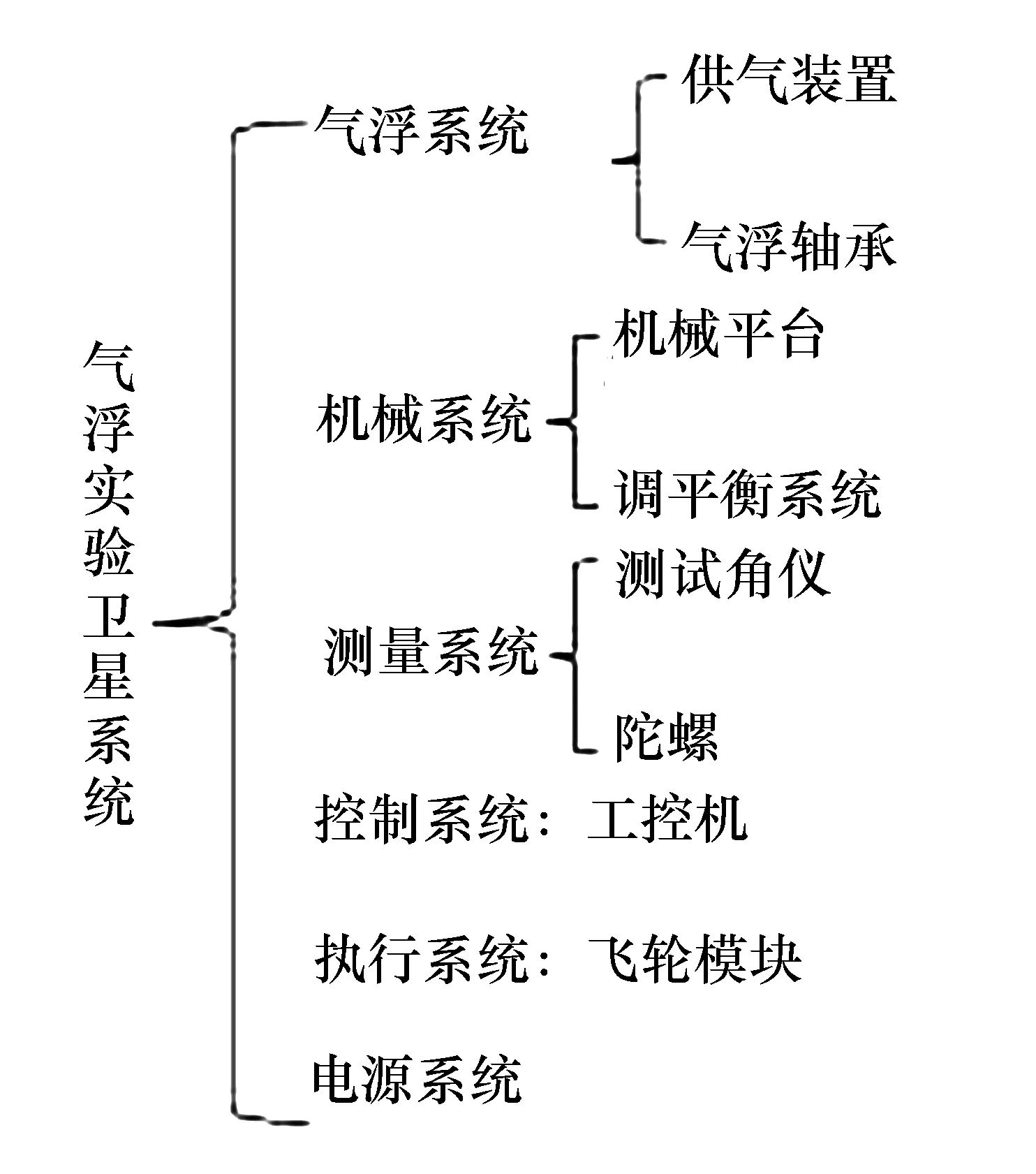
图1 气浮实验卫星系统组成
1.1 气浮系统
气浮系统主要由供气装置和气浮轴承组成,其作用是使气浮台能够在3个方向上转动,提供一个低摩擦、微重力的接近太空的力学环境[4-6]。
1.1.1 供气装置
供气装置由空压机、冷干机、QPS精密过滤器以及通气管路等组成。空压机提供高压空气供气浮轴承使用。空压机采用无油空气压缩机,型号FB-95/7(见图2),流量为204 L/min,容积为55 L,输入功率为1 120 W,工作时保存气体压力为0.4~0.8 MPa,气压低于0.4 MPa时自动开始压缩空气。根据气浮轴承的耗气量为2~3 L/min,需要高压气体压力为0.4~0.8 MPa,FB-95/7型空气压缩机可以满足要求。

图2 FB-95/7型空压机
冷干机和QPS精密过滤器如图3所示,它们的作用是将空压机压缩的高压空气进行干燥和过滤处理,过滤空气中固体微粒、水滴及油雾等气溶胶类杂质,给气浮轴承供给干燥清洁的空气,从而可以避免气浮轴承表面快速氧化腐蚀,提高轴承使用寿命。

图3 CY-10AC型冷干机和过滤器
1.1.2 气浮轴承
气浮轴承是整个系统中最关键的部分,由球窝、气浮球和轴承支柱组成,用于支撑整个气浮实验卫星的重量,同时可以提供三轴的转动自由度。利用气浮技术为气浮实验卫星系统提供一个低摩擦、微重力的接近太空的力学环境,从而实现对气浮卫星的三轴姿态控制全物理仿真。
考虑到气浮轴承成本的限制以及其承载能力和运动范围的要求,本次实验设计使用的气浮球轴承不同于一般的半球型轴承,而是采用超半球型轴承,如图4所示。轴承直径120 mm,承载能力大于150 kg,且可以保证滚转和俯仰的运动范围大于正负30°。轴承支柱高度500 mm,球窝布局在轴承支柱的顶端,具体如图5所示。

图4 气浮轴承

图5 轴承支柱及球窝
1.2 机械系统
气浮实验卫星机械系统主要包括机械平台和调平衡系统等,如图6所示。

图6 完成调平的机械平台实物图
1.2.1 机械平台
机械平台是整个系统的主要承载单元,设计时必须要对其进行受力分析和强度校核,并且进行刚度计算,使其变形在容许范围之内。机械平台采用上下层布局方式,设计过程中为了考虑质心调节系统的要求,采用对称设计。气浮轴承通过轴承盖固定于上下平台中间位置,下平台中间挖空使得轴承支柱贯穿,满足气浮轴承工作需求;上下层及轴承盖之间分别采用4个工字梁连接,上下平台上面分别设计有间距25 mm的M6螺纹孔,便于调平衡系统以及其他部件的安装。除此之外,为了便于后期传感器以及飞轮供电线路的连接,在上平台稍偏中心的位置挖了一个孔,用于线路的布置和安排。
完成机械平台的结构布局形式后,需要对其进行模态分析和静力分析、判断结构的强度和刚度是否满足设计要求。利用ABAQUS对其进行模态分析和静力分析,结果见表1。
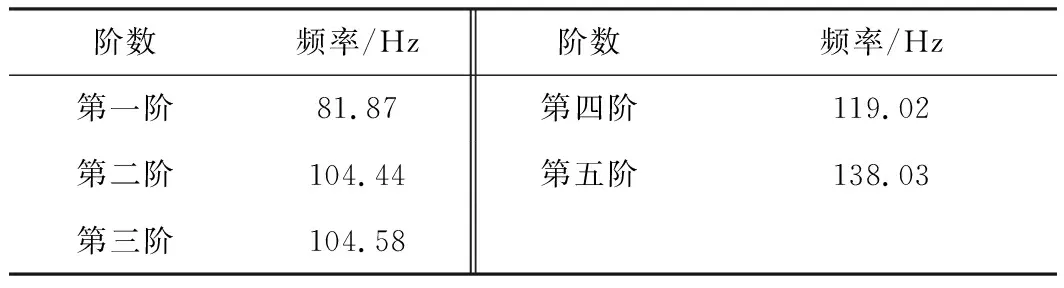
表1 机械平台前五阶模态分析结果
从表1中可以看出机械平台基频为81.87 Hz,满足设计要求。
图7和图8是机械平台静力分析的结果,平台材料为铝,密度为2.71 g/cm3,弹性模量和泊松比分别为70 GPa和0.3,边界条件设置为轴承盖下端固定,载荷加1 000 N,分析其应力分布和变形大小,从而判断结构的强度和刚度是否满足设计要求。
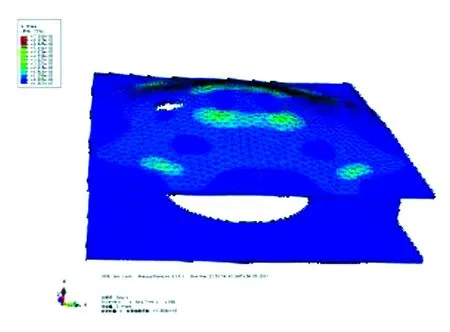
图7 机械平台静力分析应力图

图8 机械平台静力分析变形图
从图7和图8可以看出,平台在承受1 000 N力的情况下最大应力约为0.483 6 MPa,铝的屈服极限为80 MPa,强度满足设计要求,且有很大的设计余量;最大位移约为0.013 38 mm,考虑到系统正常工作的前提是质心调平衡要将重力偏心力矩调节在0.1 N·m,对100 kg台体即要求重心和轴承回转中心偏差要小于0.1 mm,因此结构变形引起的位移满足条件,结构刚度满足设计要求。
1.2.2 调平衡系统
调平衡系统是保证整个系统高性能正常工作的关键和灵魂[7-9],用来调节三轴气浮实验卫星的质心,保证质心和气浮轴承的转动中心重合,从而减小和消除不平衡重力偏心力矩,减小其对气浮实验卫星系统姿态控制实验的影响。

图9 不同质量等级质量块实物图
为了保证质心位置调控的快速性和准确性,设计了不同质量等级的质量块,如图9所示,从左到右质量分别为26、213、613 g和1.5 kg,配合使用大质量块和小质量块便可以对质心位置进行快速且高精度的调节。
1.3 测量系统
姿态传感器是气浮实验卫星系统姿态确定的重要组成部分,其原理是测量系统相对于惯性空间的姿态信息,根据测量信息得到系统相对于惯性空间的姿态[10-11]。主要包括三轴陀螺仪(见图10)和三轴角度仪(见图11),陀螺仪和角度仪分别对气浮实验卫星的角速度和角位置进行测量,从而实现气浮实验卫星的姿态确定。

图10 TL630-0050三轴陀螺仪

图11 TL766D-RS232三轴角度仪
1.4 执行机构
执行机构由与3个体坐标轴平行的三正交飞轮组成,用来提供3个方向控制力矩。飞轮系统由电机、驱动器、轮子以及安装架等组成,部分简图如图12所示。电机选用60A3A02030型低压伺服电机。轮子材料为铝材,直径为300 mm,厚度为16 mm,转动惯量为0.034kg·m2,可以满足气浮实验卫星在干扰力矩0.1 N·m下100 s不饱和的指标要求。
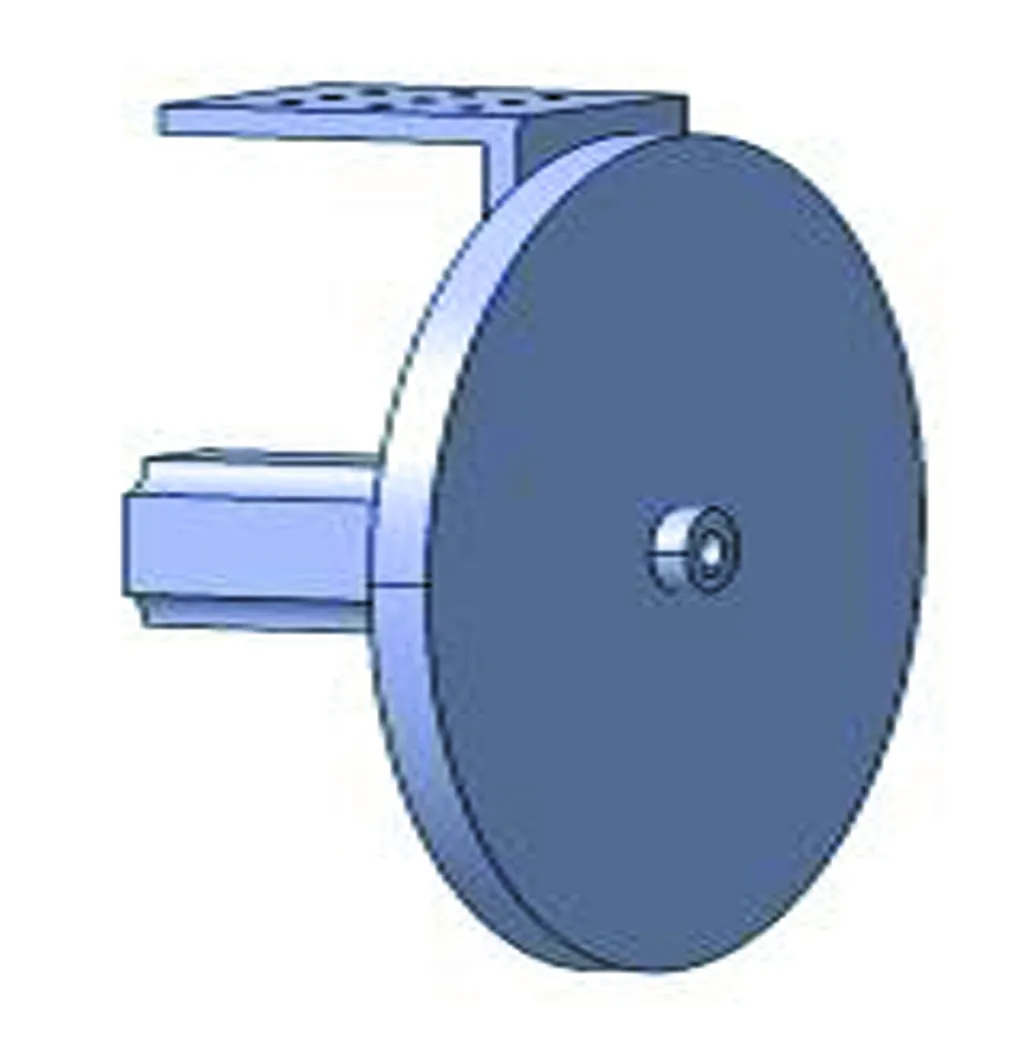
图12 飞轮系统组成部分简图
1.5 控制系统
控制系统是整个气浮实验卫星的大脑,主要实现测量信号采集、控制指令计算、运算处理与决策,并实现控制指令发送、信息传递、监测、计算,同时具有记忆保存实验数据等作用。控制系统主要包括工控机和接线盒等组成,工控机由机箱、控制卡、数据采集卡和模拟输出卡等组成。本次气浮实验卫星控制系统采用PS PXI -3050控制器,该工控机同时包含有PS PXI -3361多功能数据采集卡和PS PXI -3381 32通道模拟输出卡等。工控机实物图见图13。

图13 PS PXI -3050工控机实物图
1.6 电源系统
电源系统是整个气浮实验系统的能量来源,主要包括36V8AH电池(见图14)、逆变器和转换电源等组成,用来给气浮实验卫星系统的工控机、飞轮、陀螺仪和倾角仪等部件供电。
表2详细列出了整个系统的所有耗电部件以及其供电电压等。

表2 耗电部件及其输入电压

图14 36V8AH电池
从表2可以看出,电源系统必须提供36 V直流、220 V/50 Hz交流,以及9~36 V直流电,因此,选用36 V、8 Ah电池直接给飞轮系统提供36 V直流电。用36 V直流转220 V/50 Hz交流逆变器,将直流电转成交流电供PS PXI-3050控制器使用;TL630-0050三轴陀螺仪功率较小,直接使用控制器模拟输出卡提供12 V电压供其使用;TL766D-RS232三轴角度仪由于所需功率较大,使用控制器模拟输出卡无法提供,直接使用36 V电池电源可能导致传感器烧毁,因此需要单独配备一个电源转换器,将220 V/50 Hz交流电转换成24 V直流电供TL766D-RS232三轴角度仪使用。
2 实验平台应用分析
该平台可以用于卫星姿态动力学实验的教学,教学内容的设置可以从简单到复杂逐步展开。随着学生对卫星姿态动力学概念及基本理论的掌握,利用可编程模块调动学生自主科研能力及兴趣,不断提高学生的科研水平。
2.1 姿态确定实验
姿态动力学模型采用经典的卫星姿态动力学方程组[12],将动力学方程组线性化后作为系统状态方程,选择系统3个欧拉角作为被测量,采用LS-SVM辅助卡尔曼滤波算法进行卫星姿态确定实验。仿真参数选择采用气浮实验卫星系统的参数,即转动惯量Ix=6 kg·m2、Iy=7 kg·m2、Iz=9 kg·m2;力矩Mx=-0.2 N·m、My=0.02 N·m、Mz=0.05 N·m;初始条件设置见表3。表3中:、θ和ψ分别为气浮卫星的滚动角、俯仰角和偏航角;ωx、ωy和ωz分别是气浮卫星的角速度在惯性坐标系[12]的3个分量;下标“0”表示初始状态。限于篇幅以滚转通道为例进行实验,实验结果如图15和16所示。

表3 初始条件
从图15滚转通道EKF结果与SVM辅助EKF结果对比可以看出,采用最小二乘支持向量机辅助卡尔曼滤波的结果更好,通过计算均方根误差发现,仅采用扩展卡尔曼滤波结果和真实值的均方根误差为0.022 1,采用LS_SVM辅助EKF的结果和真实值的均方根误差仅为0.010 2。图16给出了滚转通道LS_ SVM预测非线性误差效果,图中蓝线是真实的非线性误差,红圈是算法预测得到的非线性误差,从图中可以看出算法的预测结果与真实误差基本一致。

图15 滚转通道EKF结果与SVM辅助EKF结果对比图

图16 滚转通道SVM预测非线性误差效果图
2.2 姿态控制实验
完成系统调试以及实验准备工作后,可以进行姿态控制实验,图17是整个系统三轴指向稳定的示意图。限于篇幅,以滚转通道为例进行姿态控制实验,实验结果如图18和19所示。
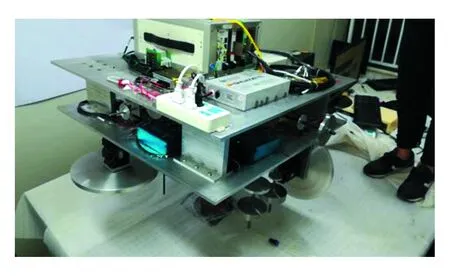
图17 三轴指向稳定气浮实验卫星系统
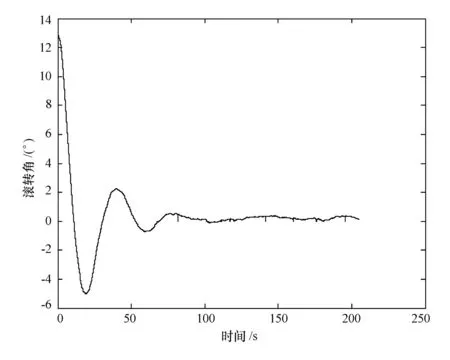
图18 滚转通道角度变化实验曲线
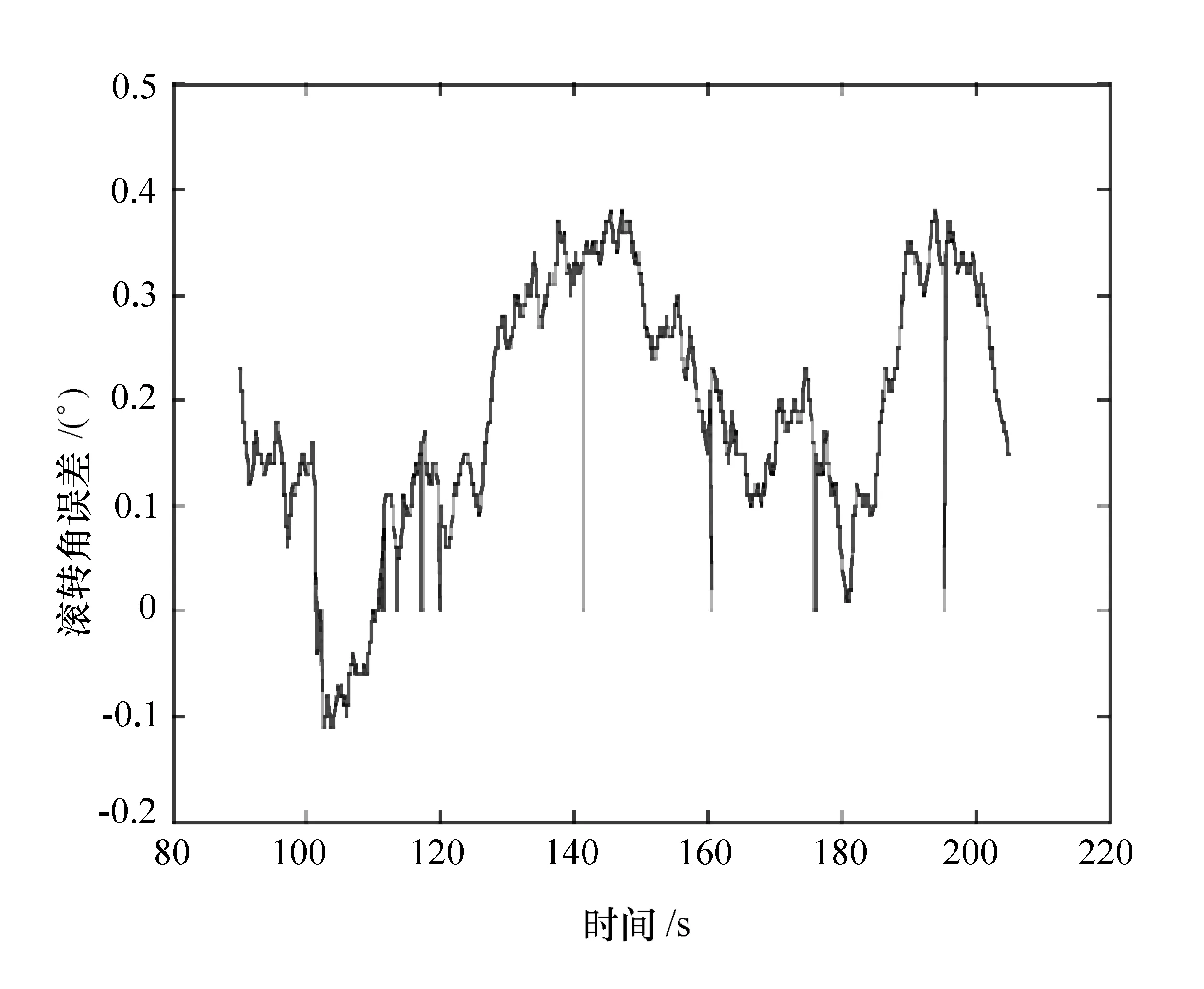
图19 滚转通道角度控制误差实验曲线
根据姿态滚转通道稳定实验所得到的数据绘制实验曲线。可以看出,滚转通道在给一定的初始姿态偏差后,系统可以最后实现稳定,从图19中可以看出,滚转通道最终稳定后滚转角误差在0.4°以内,满足实验要求。
3 结语
基于气浮原理搭建了一套三轴气浮卫星实验平台。该平台较好地模拟卫星飞行的微重力环境。在卫星姿态动力学教学实验中,可以帮助学生直观、深入地理解卫星姿态运动的基本概念及理论,其可编程功能能够激发学生的自主科研热情,有利于提高卫星实验的教学质量。此外,该平台也是卫星姿态控制科研项目中的重要部分,对于节约科研成本、保证科研项目进度等方面作用也比较显著。