基于雾计算的智能交通信号灯控制算法研究
2018-11-08乔佳利郑晓彦高金辉
乔佳利, 郑晓彦, 高金辉
(1. 河南师范大学 电子与电气工程学院, 河南 新乡 453007; 2. 河南广播电视大学, 河南 郑州 450008)
现有的交通信号灯[1-2]控制方法中,通过交通感应策略[3-4],利用当前的交通信息来优化交通灯的设置,这一策略的关键是如何预测即将到来的车辆。一般来说有几种方法, 第一种是使用路面环路探测器。然而,路面环路探测器需要部署较多,在安装过程中,道路需要被拆除,流量通常会中断,感应回路由于其他结构的原因也容易破碎,因此大规模部署不方便。 第二种是使用基于视频的交通检测系统。这个系统需要高度的人为干预。为此,提出了自动化的基于视觉的方法[5-6]。与环路探测器相比,摄像机可以提供更多的车辆信息。然而,视频图像识别仍然是一项具有挑战性的任务。此外,一些环境因素也可能影响检测的准确性。 第三种是使用无线传感器网络(WSNs)[7],这种方法有一些限制。其中一个问题是由于系统中可能存在大量的检测节点[8],维护成本较高。此外,WSN系统的安全性难以保证。检测节点可以被破坏,可以由攻击者产生干扰信号来误导控制节点 。 本文通过车联网和雾计算的网络架构,路边接入网检测即将到来车辆的流量信息传送给控制平台,然后对交通灯进行智能高效的控制,保证车辆与交通灯之间的通信。
1 系统构成
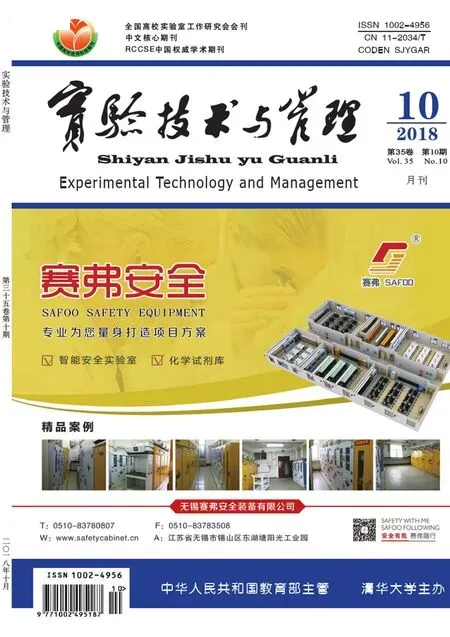
基于雾计算的智能交通信号灯控制系统,由车辆车载单元(OBU)(见图1)和路边接入网设备、车辆、交通信号灯、控制平台和雾计算组成系统,其架构见图2。车辆利用车载单元和路边节点单元通信以此收集过往车辆信息,发送给控制平台,然后控制交通灯。这样的车辆通信网络是被称为“VANETs”,一个VANET主要由4种实体组成:控制平台(Ta),路边单位(RSUs),嵌入OBUs(若干车载单元)的车辆和交通信号灯。
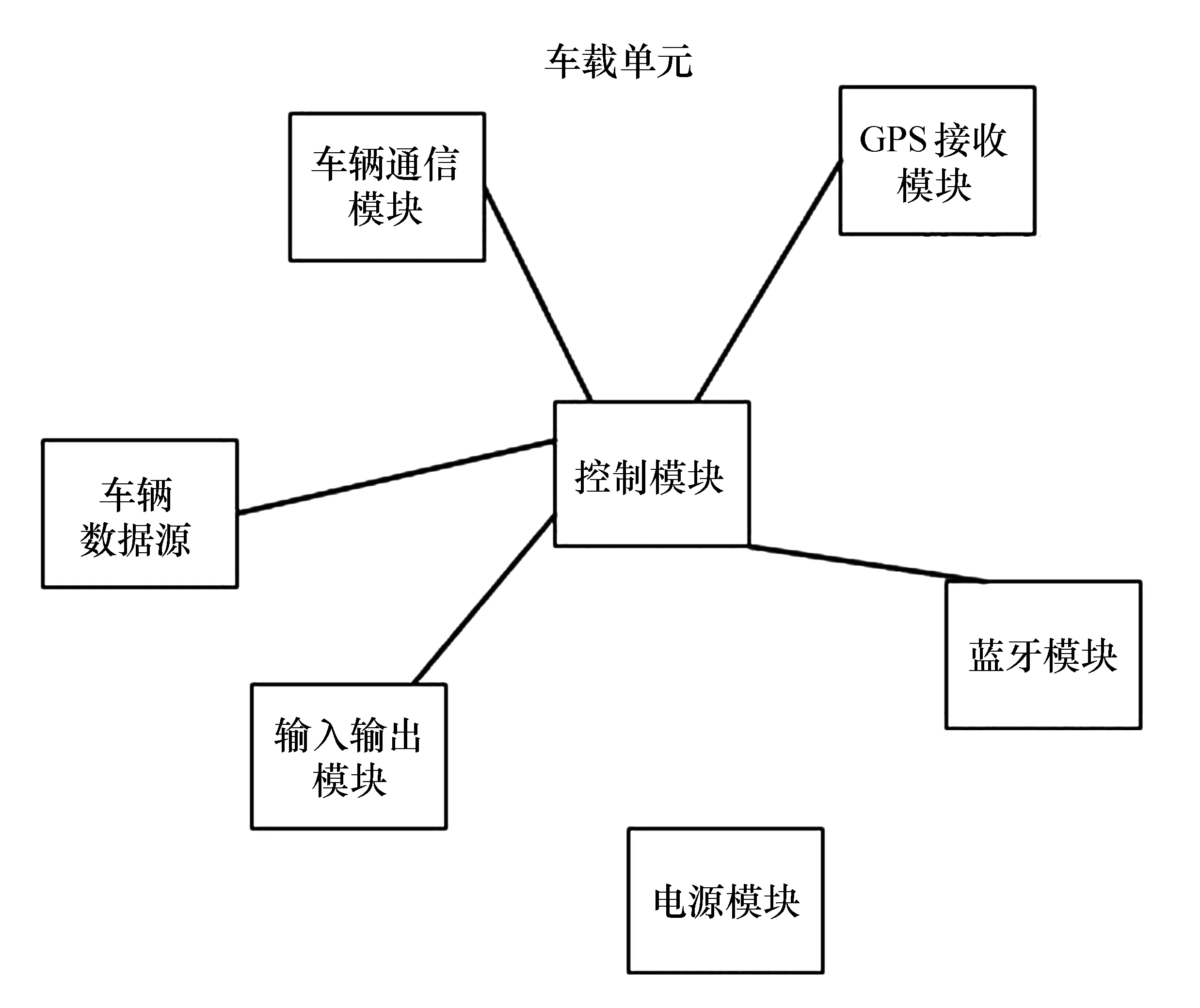
图1 车载单元(OBU)
图2 控制系统的架构
控制平台(Ta):Ta是一个完全信任的权威,它生成系统的全局参数。
路边单位(RSUs):RSUs部署在路边,以协助交通灯和车辆之间的通信。
交通信号灯:调整红色和绿灯设置,以控制十字路口的交通流量。
车辆:车辆通过无线通信向路边接入网设备报告其状态信息,路边接入网设备处理状态信息并将信息传递给控制平台进行处理,控制平台将处理的信息输送给交通灯,实现各个方向的交通红绿灯的控制。此外,假设每个车辆都配备了防篡改GPS,车辆的计算能力并不完全相同,所有的加密计算都是在可信设备中运行的。
2 控制算法
雾计算[9]是云计算的延伸概念,由思科首创。雾计算是一个系统级的水平架构,在网络的边缘连续提供了从云到终端的计算能力、存储容量和网络服务。在雾计算中,用户利用大量的最终用户客户端或接近用户的边缘设备来执行计算和存储的操作。在使用雾计算的交通信号灯控制方案中,交通灯可以作为一种雾装置,根据收到的信息,控制平台可以运行一个流量调度算法来调整交通灯[10-11],该方法具有低延迟的特性,算法是用哈希碰撞[12]谜题构造的。该算法由5个阶段组成:系统设置,拼图分配,验证,生成和决策。图3为算法的阶段组成演示图。

图3 算法的阶段组成演示图
在这个阶段,Ta为系统中的车辆和交通灯生成系统参数。在输入一个安全参数l,生成系统参数如下:
选择一个对称密钥加密方案δSSK(.)/DSSK(.);
选择一个密码散列函数SH:{0,1}*→{0,1}γ,γ是指定的密码谜题硬度;
项目输出系统参数(γ,δSSK(.)/DSSK(.),SH)。
系统中所有的车辆和交通灯都必须储存系统参数(γ,δSSK(.)/DSSK(.),SH)。考虑道路交叉点的场景,如图4所示。

图4 道路交叉点的场景演示图
我们使用一个单一的交通灯Rπ表示多个交通灯。在每个时间段τ,红绿灯Rπ生成一个k比特长度的随机种子ητ∈R{0,1}k,k是一个取决于l的参数。分发种子ητ给接近Rπ的车辆。交通灯Rπ具体方案如下:
产生一个随机会话密钥skτ,对称密钥加密方案的关键是δSSK(.)/DSSK(.);
利用GeoLock映射函数,根据监测区域Li的位置计算GeoLock值;
计算C1=GeoLock⊕skτC2=δskτ(ητ),和广播密文(C1,C2)。
在这个阶段,车辆接近Rπ首先解密密文获得谜题, 在协商时间内解决难题并生成一个证明。当车辆V1收到密文(C1,C2),它生成一个证明如下:
(1) 利用GeoLock映射函数计算GeoLock值;
(2) 计算skτ=GeoLock⊕C1,ητ=Dskτ(C2);
(3) 找到(ζi,ζ,)∈{0,1}*满足SH(ητ‖statusi‖ζi)=SH(ητ‖statusi‖ζi),statusi是状态信息;

3 仿真结果与分析
在仿真中我们评估哈希冲突,构建一个具有短输出的散列函数。图5显示了哈希碰撞谜题的难度和时间解谜。当哈希函数的输出位长度增加时,发现冲突的平均时间呈指数级增长。当哈希函数的输出位长度即谜题的难度从5到27时,发现碰撞的时间范围即车辆进行证明验证的时间延迟,从0.007 ms到87.0 s,该方案中协商的时间周期与解哈希碰撞谜题的时间有关。如果确定了哈希碰撞谜题的难度,经过协商的时间周期可能比选择的难度对应的哈希碰撞谜题的时间要大,因此该方案满足了雾设备的友好性,具有较低的延时性,可以更好进行智能交通灯的控制。
4 结论
雾计算为智能交通信号灯控制提供了一种新的方法,该方法对数据传输量要求较小,具有快速处理实时数据的能力,提高本地的存储和计算能力,消除数据传输的瓶颈。本文基于哈希函数提出了一种基于雾计算的智能交通信号灯控制方案。该方案中,交通灯即为一个雾化装置,为了减少交通灯的计算和通信时间,交通灯只需要播放一个单一的字谜和执行简单的操作就能够高效地控制交通信号灯,为最终实现城市智能交通提供科学的信息基础。