360全景技术让行车更安全
2018-11-07李玉玉
李玉玉
(安徽省汽车工业学校,合肥230001)
1 引言
驾车时我们通常会参考位于车身两侧的后视镜和车内的后视镜,观察车辆两侧和后方的状况,虽然在驾驶时可以保证较高的安全性,但在泊车时仅仅依靠这三个后视镜所提供的信息却远远不够[1]。当我们坐在汽车驾驶位时,车身周围存在着大大小小高矮不一很多的盲区,或许平时你以为自己可以看见的地方,由于高度过矮,也变成盲区范围。

为了解决车身周围的盲区,K.Kate,M.Suzuki,Y.Fujita,Y.Hirama等四人于2006年首先提出全景环视的概念
2 360全景影像概述
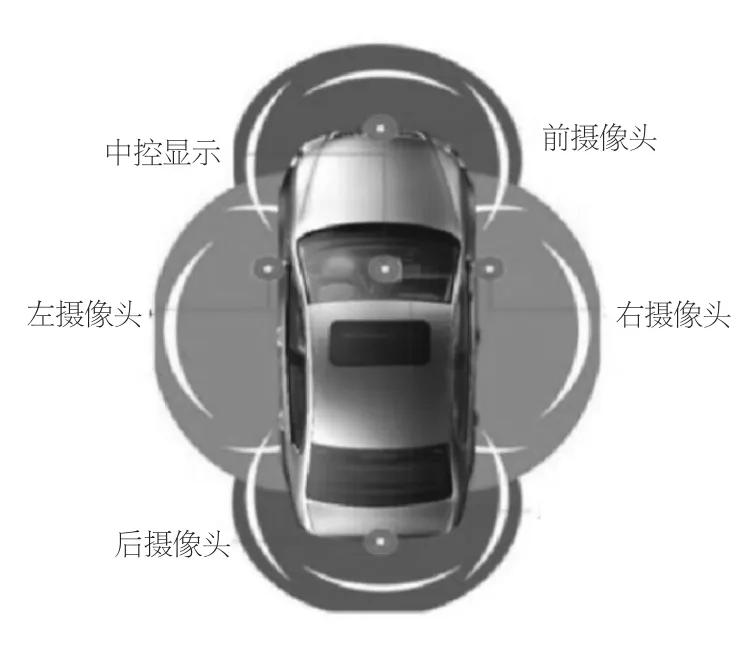
360度全景影像系统同时采集车辆四周的影像,图像的获取往往利用安装在车身前后左右4个超广角摄像头SWVC(Super-Wide-View-Camera)捕捉车辆周围状况。但由于采用SWVC后影像会产生“鱼眼失真”的现象,所以必须通过数学算法进行画面合成和画面修正,合成一幅车身周围的全景鸟瞰图,通过鸟瞰图可真正实现360°无死角,直观地呈现出车辆所处的位置和周边情况。系统大大地拓展了驾驶员对周围和环境的感知能力,使驾驶员在处理车辆起步、行车转弯、泊车入位、窄道会车、规避障碍等情况时从容不迫、轻松自如,可以有效减少刮蹭、甚至碰撞碾压等事故的发生。
360°超清全景采用COMS+DPS技术算法,纠正弧度变形,经过无缝还原技术,塑造行车真实场景。3D图像成像无缝连接,让车身周围一览无余,让驾驶者得心应手。
四路超清录像高清随行循环录制无论是前行,倒车,打左转,打右转都会自动切换,让你体验轻松驾驶。
采用国际领先的MCCD图像传感器思路摄像头同时采集车辆四周的影响汽车启动后行车时,可以360°全自动不漏秒循环记录。超清星光级夜视效果全超清分辨率昼夜模式自动贴换,超清智能补光撤车规级摄像头8层镜头,逆光和夜视光线环境都能更大提升补光功能,高感光智能采光技术夜间拍摄效果更超清画质精准倒车轨迹左右转向或者倒车时,轨迹线随着方向盘的变化而变化,且显示屏上的画面也随着变化根据车轮角度和车身参数,经过周密计算,指示车辆前行或后退使车身经过的位置,辅助准确驾驶。
Super HD超清画质24小时智能停车监控不光是白天还是黑夜,总有黑手游荡,有道可视360°全景行车记录仪,365天全天侯监控,让黑手无半点可乘之机。
馈电保护功能低电压保护,智能断电,停车熄火后,自动由电瓶供电,有人经过或者碰瓷自动进行全景记录;当电瓶耗电剩余25%之后,不在开机记录,保证下次开机打火足够用电。
双核超强内核,双核CORTEX-A9处理器,MAIL400图行加速器,主频1.6GHz更加强劲、主流水准硬件配置,多任务运行无压力。
随着360全景的发展,360全景的功能越来越丰富,增加了一些汽车主动安全方面的功能如:前视广角输出显示、左右盲区显示、DVR行车记录功能、LDW车道偏离预警、BSD环视盲区检测预警、MOD移动物体检测等功能[2]。
逻辑及显示界面也越来越丰富,支持2D全景+单视(前/后/左/右)及 3D 全景+单视(前/后/左/右)等多种显示模式。
360度全景影像系统,使用的是光学传感器,利用视觉感知车身周围环境的一种方式,但每种传感器都有自己的软肋,因摄像头在雨雾环境下就会“失明”,强光和弱光环境它也不能很好地处理。针对这种情况,出现了360度全景影像系统与雷达融合的技术。

与光学传感器相比,车身雷达明显分辨率较差,不过它在测距功能和恶劣天气下明显更胜一筹。虽然光学传感器在恶劣天气下能力受限,但它依然能识别色彩(交通灯和路标),而且在分辨率上依然有优势。通过将雷达等传感器和全景系统的融合,并利用综合信息更准确地感知周边环境,让汽车驾驶更安全更可靠。
随着道路车辆不断增多,拥挤的城市地少车多,开车不难泊车难。因泊车操作产生的纠纷和事故也在呈逐年增加之势。360度全景泊车辅助系统可以为驾驶员提供车辆周围360度的全景鸟瞰图,帮助驾驶员清楚了解并掌握车辆周围环境、与障碍物的相对距离,扫除视野盲区,轻松、方便、安全地完成泊车操作,成为当今汽车辅助驾驶领域的研究热点。
3 结论
本实用新型公开360度全景安全行车影像监控系统,包括图像分割控制器和若干个摄像头,所述图像分割控制器包括外壳和设置在外壳内部的图像分割控制模块,所述图像分割控制模块包括电源模块、摄像头模块、图像分割微处理器和储存器,所述摄像头将收集的图像信息输送到摄像头模块,经摄像头模块将模拟信号转化为数字信号送到图像分割微处理器,储存器将收集到的图像信息储存备用。本实用新型在车身上设置多个摄像头,能够全方位实时监控,实时录像汽车的四周环境,便于安全行车。本影像监控系统内设储存器,用于储存摄像头拍摄到的图像信息,便于使用者日后提取查看。
