港珠澳大桥沉管隧道最终接头测控技术
2018-11-07张秀振
张秀振
(中交一航局第一工程有限公司,天津 300456)
0 引言
沉管隧道是在水下将管节不断依次重复沉放、对接的一种工法,在最终沉放管节的端部必然会产生施工间隙,将此间隙进行连接的施工就是最终接头[1]。通常最终接头的施工方法有干地施工法、水下施工法、止水板施工法、V形箱体施工法等。
港珠澳大桥沉管隧道全长6 704 m,隧道两端分别位于海中东、西人工岛上,其中沉管段总长5 664 m,共33个管节。最终接头采用整体式主动止水最终接头技术[2],钢壳内灌注混凝土形成三明治组合结构[3],位于E29与E30之间,管底高程-27.937 m,处于半径5 500 m的平曲线上。
1 龙口姿态测量
最终接头位于E29与E30之间,龙口姿态的测量通过E29、E30管节对接面姿态的测定来完成。主要内容为测定E29、E30管节安装完成后近最终接头端的端钢壳整体姿态情况,包括管节轴线方位角、端钢壳竖向倾角、端钢壳横向偏差、里程偏差等,通过测量相关特征点进行端钢壳端面所有标定特征点坐标的精确推算并进行精度评估最终接头纵断面如图1所示。
1.1 端面特征点计算
1.1.1 管节坐标系的定义与特征点布设
在管节首、尾节段端面上高程分别为3.5 m、3.8 m、7.0 m、14.9 m处使用自贴式反射片布设8个端面特征点,单根管节共16个。特征点布置如图2所示。

图1 最终接头纵断面示意图Fig.1 Schematic diagram of final joint vertical profile

图2 特征点布置示意图(端面)Fig.2 Schematic diagram of feature point layout(end face)
以水平状态下管节底面所在水平面为XOY平面,以近最终接头端管节端面底边线中点为原点O,管节端面中心点连线所在竖直平面为YOH平面。E29、E30管节坐标系X轴均以指向右行车道为正,Y轴均以指向S8端为正,H轴以竖直向上为正。E29管节坐标系如图3所示。

图3 管节坐标系示意图(E29管节)Fig.3 Schematic diagram of immersed tube coordinate system(E29)
1.1.2 端面特征点计算
管节预制完成后通过标定可以得到管节端面任意特征点P在管节坐标系下的坐标(X,Y,H),管节端面底边线理论中点O在工程坐标系的坐标为(X0,Y0,H0),安装后管节尾端横倾为A,管节纵倾为B,管节轴线方位角(首尾中心点连线)为C。
按照管节坐标旋转纵倾→旋转横倾→平移至工程坐标系→平面旋转轴线方位角的顺序进行坐标转换[4],得到P点的工程坐标(X1,Y1,H1)。X1=-Xcos Acos C-Xsin Asin Bsin C-Ysin Bsin C+Hsin Acos C-Hcos Asin Bsin C+X0
Y1=-Xcos Asin C+Xsin Asin Bcos C+Ysin Bcos C+Hsin Asin C+Hcos Asin Bcos C+Y0
H1=-XsinA cos B+Ysin B-Hcos Acos B+H0
1.2 端面特征点测量影响因素分析
针对端面特征点坐标计算公式进行各变量的全微分[5]。

再根据坐标计算公式进行偏导数求取,得端面点坐标分量同各变量的偏导数。
从端面特征点坐标分量的全微分公式可以看出,影响端面特征点坐标计算的主要因素为尾端端钢壳中心坐标(x0,y0,h0)、端钢壳特征点管节坐标(x,y,h)、尾端横倾A、管节纵倾B、轴线方位角C的测量精度。
1.3 测量方法及精度评估
根据沉管隧道施工工艺及现场实际情况,通过沉管隧道贯通误差预计[6]、导线布设方法[7]、陀螺定向边加测[8]等一系列研究,经多次优化和验证,形成了一种新的沉管隧道控制网网形“双线形联合锁网”,大大提高了沉管隧道贯通测量精度。
龙口端面特征点测量方法主要有3种:1)通过隧道内贯通测量进行测定;2)在二次标定时对双测量塔特征点进行标定并在安装时使用双测量塔测控系统测量;3)安装完成后利用人孔井直接投点法将测量基准引入管内进行测量。
尾端横倾A和管节纵倾B主要通过2种方法测定:1)在管节一次标定时标定管节特征点并在管节安装后贯通测量时进行横倾测定;2)在管节一次标定时标定倾斜仪,二次标定时进行校准并在管节安装时进行纵横倾测定。
轴线方位角C可通过2种方法测定:1)在管节一次标定时标定管节特征点并在管节安装后贯通测量时进行轴线方位角测定;2)在管节二次标定时标定测量塔特征点并在管节安装时进行轴线方位角测定。
根据测量方法进行测量精度分析,可以得出各分项测量误差,然后依据测量误差传播定律[9],综合计算得到对接面特征点测量精度,评估结果见表1。

表1 最终接头对接端面特征点姿态测量精度(中误差)评估结果Table 1 The result of the measurement accuracy(middle error)of the end face feature point attitude measurement±mm
通过最终接头对接端面特征点、横倾、纵倾及轴线方位角测量方法的对比,以及测量精度评估结果的分析,贯通测量方法可作为本工程龙口姿态测量最优选择,人孔井投点方法可作为校核手段。
2 最终接头制造及标定
2.1 最终接头制造
最终接头顶板长度11.922 m,底板长度9.526 m,截面厚度同标准管节,立面总高度11.4 m。考虑到最终接头安装完成后的止水效果,制造时除对尺寸严格测量外还应控制端面水平向偏角以及竖向偏角。
2.2 最终接头标定
在最终接头预制、舾装完成之后,对其进行标定,为最终接头安装及贯通提供参数依据,为测控系统提供高精度的安装参数。
2.2.1 特征点布设
最终接头需要布设的特征点包括:端面特征点、内部贯通点、顶部特征点和测量塔特征点。
1)端面特征点布设
最终接头端面特征点布设与标准管节相同,在侧墙内边沿处使用自贴式反射片布设10个端面特征点,最终接头两个端面共布置20个端面特征点。端面特征点可为最终接头轴线计算提供数据依据。
2)管内特征点布设
最终接头内部布设2个贯通点特征点,在最终接头安装结束,提供贯通比对和倾斜初值。
3)管顶特征点布设
最终接头顶部轴线两侧共布设4个管顶特征点,为方便架设仪器,各个特征点距离边线均应大于1.0 m。
4)测量塔特征点布设
最终接头纵向轴线位置上布置了测量塔和人孔。在测量塔顶部沿轴线方向设置2个外伸支架,外伸支架垂直于轴线,在外伸支架两端共布设4个测量塔标定特征点。
2.2.2 最终接头标定方法
根据最终接头施工工艺流程,最终接头标定工作是在浮态条件下进行的,标定期间,需要提供相对比较稳定的条件,以提高标定精度。
1)独立工程控制网建立
为便于最终接头标定,在船体甲板上,以最终接头纵向方向为X轴,建立独立控制网,如图4所示,采用边角网的形式进行测量。
控制点高程通过假定其中1个角点高程,使用闭合水准测量方法进行测量,在平面控制网测量阶段可使用三角高程的方法进行复核测量。
2)浮态标定

图4 最终接头独立控制网示意图Fig.4 Schematic diagram of final joint independent control network
依据最终接头倾斜仪数据,通过船舶压载水系统将船体甲板调平,利用独立工程控制网点架设全站仪进行标定。浮态标定的技术难题是控制基准面和测量基准面不平行,标定期间应根据船舶姿态情况适时关闭仪器自动补偿器,确保测量仪器与船舶运动状态一致。最终接头标定见图5。

图5 最终接头特征点标定Fig.5 Final joint feature point calibration
3 最终接头安装测控
3.1 安装定位系统
3.1.1 定位系统组成
最终接头安装定位系统主要由高精度定位GPS、高精度自动照准全站仪、精密倾斜仪、不同距离无线数据传输设备、数据处理计算机及视频设备等组成。
3.1.2 定位系统精度分析
1)平面精度分析
最终接头双测量塔测控定位误差来源主要包括:测量塔特征点标定误差、沉放定位时RTKGPS定位误差、倾斜仪测量误差、测量塔水中形变误差等[9]。
测量塔特征点标定误差:m0=±2.0 cm
沉放定位时GPS RTK定位误差:m1=±2.0 cm
倾斜仪测量误差:m2=±1.1 cm
测量塔水中形变误差:m3=±1.0 cm
综合以上误差,测量塔定位中误差:

2)高程精度分析
GPS天线高度的量测误差为:m0=±1.0 cm
沉管沉放GPS RTK高程误差为:m1=±3.0 cm倾斜仪误差为:m2=±1.1 cm
采用测量塔法沉放时对接面的高程绝对精度估计[9]:

最终接头安装定位系统精度可以满足最终接头安装设计及施工精度要求。
3.2 预警辅助系统
最终接头安装过程中的重大安全风险之一是最终接头与E29/E30管节端面的碰撞,为规避风险、确保安全,在测控系统中增设了防碰撞预警辅助系统。预警系统在最终接头端面安装声呐测距设备,通过声呐发出声波反射在E29/E30钢帽上,以获取最终接头与E29/E30端面间距离,并在软件上实时显示,若小于提前设置的安全距离,系统将自动报警提示,此时须及时调整最终接头至安全状态。最终接头实时位置状态如图6所示。
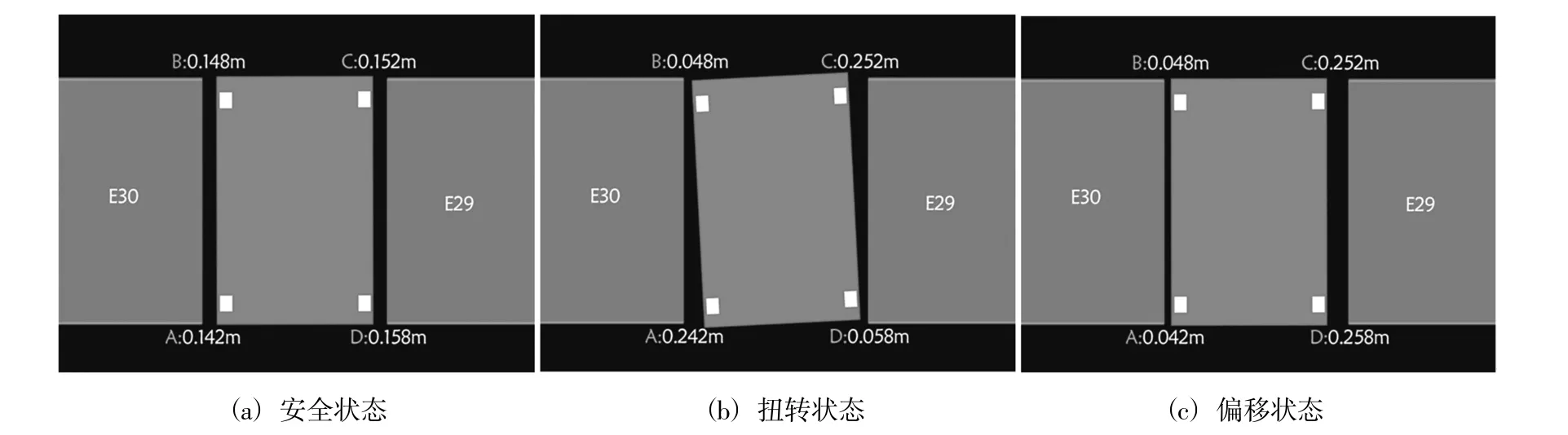
图6 最终接头状态示意图Fig.6 Schematic diagram of final joint state
3.3 姿态控制系统
最终接头内部安装的精密倾斜仪可以实时测定最终接头的姿态。当最终接头出现倾斜时,该系统可以实时显示其姿态数据及调整量。
在坞内使用吊点处4个测点标定倾斜仪初始值,在姿态调整软件中输入倾斜校正参数。预设最终接头可能出现的最大倾斜角度作为倾斜报警值,在实时调整过程中超出报警值时,软件通过红色闪烁限差圆进行提示,最终接头安装暂停,用起重船缆绳调整至姿态正确后继续施工。
在最终接头顶部外侧4个吊点附近各布设1个姿态测点,测点调整量实时显示在系统界面中,根据软件显示对吊机进行相应操作,姿态调整如图7所示。
图7 吊缆姿态调整示意图Fig.7 Schematic diagram of attitude adjustment of lifting cable
3.4 最终接头安装精度
最终接头安装完成后打开安全门,通过沉管隧道控制网“双线形联合锁网”进行贯通测量,测量结果显示最终接头安装达到毫米级精度:最终接头首端(E29对接端)偏北2.6 mm,尾端(E30对接端)偏北0.8 mm。
4 结语
最终接头是沉管隧道施工的关键工序,而最终接头测控技术是其精确对接和沉管隧道顺利贯通的保障。本文的研究成果成功应用于港珠澳大桥沉管隧道的最终接头施工,解决了龙口姿态的精确测定、最终接头浮态条件下的标定、安装过程的精确定位和姿态控制等技术难题,实现了最终接头毫米级安装精度。对类似工程具有参考和指导作用。
