基于超声图像处理的HIFU所致组织损伤自动检测方法:实验研究
2018-11-06钱盛友王润民江剑辉
田 灿,钱盛友 *,邹 孝,刘 备,王润民,江剑辉
(1.湖南师范大学物理与信息科学学院,湖南 长沙 410081;2.深圳普罗惠仁医学科技有限公司, 广东 深圳 518067)
HIFU治疗是近年兴起的一种非侵入局部治疗技术[1-2],其原理是使超声波在目标区域聚焦,并形成局部高能量密度,组织温度瞬间可达65℃以上,并产生凝固性坏死,从而达到治疗肿瘤的目的[3-5]。HIFU治疗肿瘤是基于热机制对组织的损伤,因此治疗过程中实时监测组织损伤非常重要[6-7]。通过HIFU治疗中获取的实时图像,利用机器视觉技术自动检测出生物组织变性的位置,可帮助临床医师快速、客观定位治疗损伤区域,更好地掌控疗效进程和制定进一步的治疗方案。现有超声监控手段主要基于回波信号[8-9]和超声声像图。相对于回波信号,超声声像图更具直观性。HIFU治疗过程中获取的超声监控图像可反映组织损伤情况[10-12]。冯艳玲等[13]对HIFU辐照前后图像焦域附近进行二维亚像素级相关分析;陈华等[14]采用线性判别分析(linear discriminant analysis, LDA)方法对图像提取的特征参数进行处理;颜佩等[15]提取减影图像小波系数Hu矩等特征参数对组织损伤进行识别。上述方法均依赖图像配准技术[16],且均需手动确定HIFU辐照区域,从而判别组织是否损伤。本研究根据HIFU辐照后超声声像图中HIFU损伤区域的特点,采用粗定位和损伤识别相结合的方法,探讨基于超声图像处理的HIFU所致组织损伤的自动检测方法。
1 实验系统与方法
实验系统主要由HIFU源、超声成像仪和计算机控制系统组成(图1)。HIFU探头为PRO2008系列(深圳普罗公司),以Philips EnVisor型超声诊断系统获取超声声像图,并由PCI8001图像采集卡输入计算机。测试对象为新鲜离体猪肉。将离体猪肉置于HIFU探头正下方,保存并分析HIFU辐照前后的超声声像图。辐照后对离体猪肉切片进行肉眼观察,记录其损伤情况及位置,作为评价检测结果的依据。
2 HIFU损伤区域粗定位
对HIFU辐照后超声声像图进行灰度化处理后,截取ROI,使其包围住测试样本。①设计灰度极大区域搜索算法,定位图像中所有亮斑;②结合数学形态学、连通域标记及Canny边缘检测算法提取测试对象的边缘轮廓;③利用欧式判据筛选出HIFU损伤候选区。
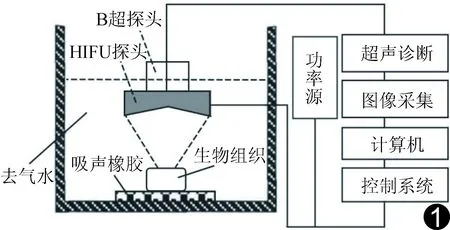
图1 实验系统示意图
2.1灰度极大区域搜索 超声声像图中HIFU损伤区域呈现为局部亮斑,可将其视为灰度极大区域,其灰度值在中心处最大,向四周逐渐变小。具体算法:①遍历图像中所有像素点,寻找灰度最大值点,如灰度最大值>灰度阈值(T),则该点可视为亮斑中心点,并保存其坐标值,以此为中心形成1个尺寸合适的矩形窗口;②将矩形窗口中所有像素灰度赋值为0后,再次遍历图像中所有像素点寻找灰度最大值点,以此类推,直到图像上灰度最大值≤T为止,完成图像上所有灰度极大区域的搜索。
由于超声声像图中大部分亮斑为扁平状,因此窗口应设计为宽大于高的矩形。通过前期实验测试,最终认为以最大灰度值为中心,上下分别取5个像素点、左右分别取9个像素点,即矩形窗口尺寸为19×11,可较好地包围住1个亮斑区域,同时又不影响相邻的亮斑区域。通过分析图像的灰度直方图发现大部分像素分布在灰度均值(G)附近,形成1个单峰,亮斑中心点T应设在单峰右侧(灰度值较大)像素数目较少处,故最终确定最优T为2G。
2.2测试对象边缘轮廓提取 数学形态学是以形态结构元素为基础对图像进行分析的数学工具[17],其基本运算为膨胀和腐蚀。通过这2种基本运算可以生成许多其他的形态学运算。设f(x,y)是输入图像,b(x,y)是结构元素,用结构元素b对输入图像f进行膨胀和腐蚀的运算定义分别为:
(f⊕b)(s,t)=max{f(s-x,t-y)+b(x,y)|(s-x,t-y)∈Df,(x,y)∈Db}
(1)
(f⊙b)(s,t)=min{f(s+x,t+y)+b(x,y)|(s+x,t+y)∈Df,(x,y)∈Db}
(2)
先腐蚀后膨胀的过程为开运算,其定义为:
f·b=(f⊙b)⊕b
(3)
由于离体猪肉边缘存在声波反射,使其边缘分布多个零散亮斑,如在原图上直接提取猪肉边缘,则这些亮斑处会明显凹凸不平。为获取平滑的边缘轮廓,本研究利用开运算得到ROI背景图,而后对背景图进行阈值分割,并在二值图像的正反图像中2次使用连通域标记保留最大连通域[18],去除分离的白色和黑色干扰区域后,得到完整的目标区域二值图像;最后利用Canny边缘检测算法得到目标区域的边缘轮廓图。
2.3筛选HIFU损伤候选区 利用灰度极大区域搜索算法定位图像中所有亮斑后,为排除边缘亮斑噪声干扰,计算所有亮斑中心至边缘线的欧式距离,筛选出HIFU损伤候选区。
设边缘轮廓图中灰度值为1的点横坐标为X,纵坐标为Y,如存在n个亮斑,第i(i=1,2…n)个亮斑中心点横坐标为m(i),纵坐标为n(i),计算第i个亮斑中心点至边缘线的距离(d)为:
d[X,Y,m(i),n(i)]=

(4)
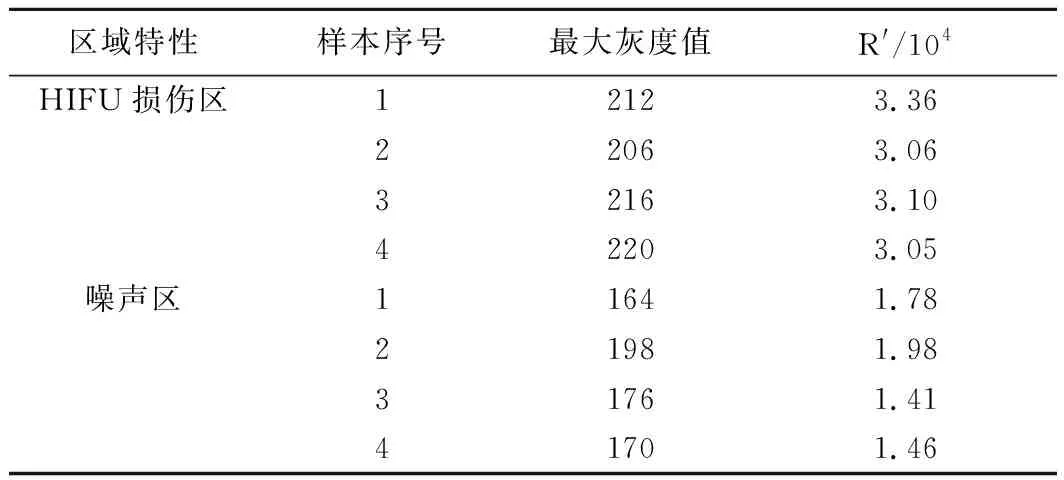
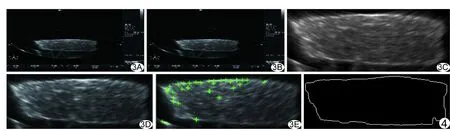
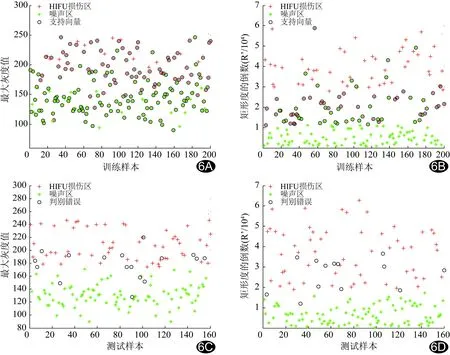
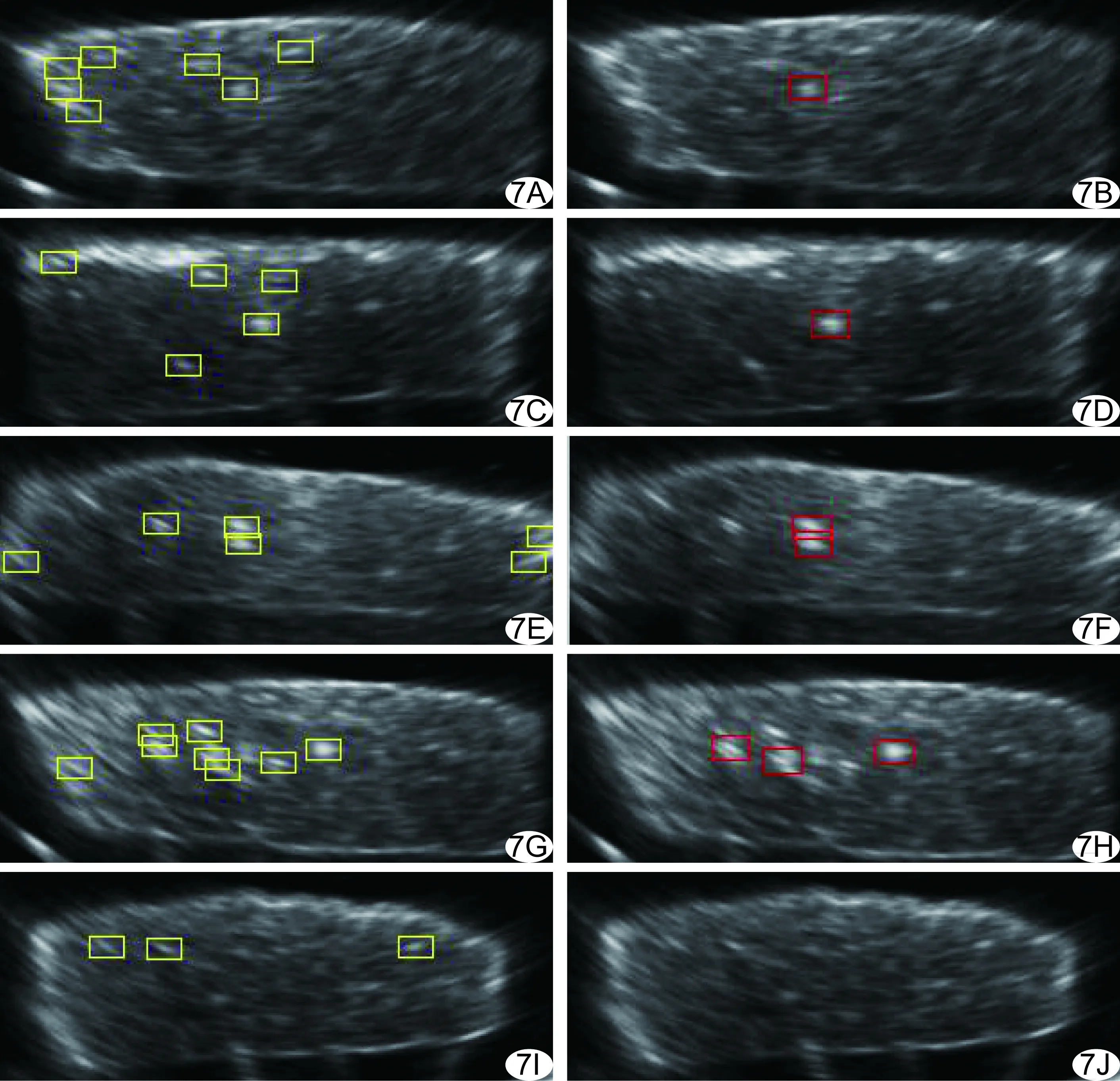
其中第i个亮斑中心点至边缘线的最小距离记为dmin(i),设距离函数阈值为Tj。排除dmin(i) 粗定位中,根据亮斑分布位置特性,可排除大部分噪声区。为进一步识别HIFU损伤,本研究最终选取可体现候选区HIFU损伤区和噪声区差异的2个特征参数,即最大灰度值和掩模(MASK)图的矩形度,并以支持向量机(support vector machine, SVM)分类器训练和测试对其进行对比分析。 3.1特征提取 ①由于HIFU治疗会导致图像中焦点处灰度值最大,因此选取最大灰度值作为特征参数。经由粗定位得到多个HIFU损伤候选区后,截取候选区作为样本并提取最大灰度值。将切片观察到出现组织损伤的区域判定为HIFU损伤区,无损伤区域视为噪声区。②矩形度特征参数的提取:由ROI原图与其背景图(通过数学形态学获得)相减得到差值图,选取其灰度直方图右侧波谷点的灰度值作为全局阈值,对其进行阈值分割,得到二值图像为含有所有亮斑区域的MASK图,截取其中与HIFU损伤候选区对应的部分,并提取矩形度。为证实MASK图矩形度的有效性,利用8幅ROI原图,分别获取8个HIFU损伤区(图2A)和8个噪声区对应的MASK图样本(图2B)。HIFU损伤和噪声MASK图样本形状存在差异,矩形度能够区分不规则形状,提示选取矩形度作为特征参数可有效区分HIFU损伤区和噪声区。 图2 候选区样本 A.HIFU损伤区MASK图; B.噪声区MASK图 设H为目标(灰度值为1的区域)的垂直高度,W为目标的水平宽度,A为目标的面积,矩形度(recognition rate, R)的定义为: R=A/(H×W) (5) 利用矩形度的倒数(R′)=1/R作为矩形度的数字特征。2个特征参数分别反映HIFU损伤区的灰度特性和几何特性。截取所有由ROI原图粗定位得到的HIFU损伤候选区和MASK图中对应部分作为样本,分别提取最大灰度值和矩形度用于SVM训练和测试。为验证这2个特征参数能否有效识别HIFU损伤区,随机选取4个HIFU损伤区和4个噪声区的最大灰度值和R′,在HIFU损伤和噪声图像中,2个特征参数均有一定差值(表1),提示可通过SVM对其进行分类识别。 表1 HIFU损伤区和噪声区的特征参数 3.2SVM分类 SVM算法的主要任务是寻找满足样本分类要求的最优超平面,实现对线性可分数据的最优分类[19-20]。本研究SVM分类器选择径向基核函数,并采用交叉验证的方法选取最优参数,完成对HIFU损伤区域的分类识别。以正确识别率(correct recognition rate, Rc)和总识别率(summation recognition rate, Rs)来衡量系统的识别效果: 图3 灰度极大区域搜索 A.HIFU辐照前声像图; B.HIFU辐照后声像图; C.HIFU辐照前ROI原图; D.HIFU辐照后ROI原图; E.灰度极大区域搜索结果, 绿色标记处为亮斑中心 图4 离体猪肉边缘轮廓 图6 HIFU损伤识别 A、B.分别为最大灰度值训练、矩形度训练,红色“+”为HIFU损伤区,绿色“*”为噪声区,“o”为训练SVM时的支持向量; C、D.分别为最大灰度值测试、矩形度测试,红色“+”为HIFU损伤区,绿色“*”为噪声区,“o”表示该点判别错误 (6) (7) HIFU损伤区域粗定位见图3。利用数学形态学、连通域标记和Canny边缘检测算法提取的离体猪肉边缘轮廓图见图4。通过提取上述边缘轮廓,根据亮斑中心至边缘的距离筛选出HIFU损伤候选区,粗定位最终结果见图5。 本实验选取53张HIFU辐照后ROI原图,通过粗定位获得346个候选区,截取候选区和其MASK图中对应部分作为样本,以186个作为训练,160个作为测试。通过Matlab 2014a软件编程,将2个特征参数分别输入SVM中。SVM对训练样本的可视化图见图6A、6B,图中HIFU损伤区大致分布在噪声区上方,说明HIFU损伤区的2组特征参数大致高于噪声区,即2组特征参数对HIFU损伤和噪声具有一定区分能力。SVM对测试样本的测试结果见图6C、6D,错误识别基本集中在分界地带。最大灰度值的正确识别率和总识别率分别为83.33%和86.25%,矩形度的正确识别率和总识别率分别为91.25%和93.33%。 通过SVM训练后的模型,以矩形度对5幅ROI原图的HIFU损伤进行自动检测,见图7。与辐照后切片对比,发现图7仅红色标识处对应的猪肉组织呈白色亮块,提示采用上述方法可检测出HIFU损伤的位置,且可正确识别不存在损伤的图像。 图7 HIFU损伤自动检测结果 A、B.1处HIFU损伤粗定位结果; C、D.1处HIFU损伤识别后的最终检测结果; E、F.2处HIFU损伤粗定位结果及识别后的最终检测结果; G、H.3处HIFU损伤粗定位结果及识别后最终检测结果; I、J.无HIFU损伤粗定位结果及识别后最终检测结果 黄色框为HIFU损伤候选区,红色框中为HIFU损伤区 本研究采用先定位HIFU损伤候选区域,再通过SVM分类器进行识别的策略,同时利用灰度极大区域搜索算法实现HIFU损伤检测的自动化过程。与传统方法相比,本方法基于HIFU辐照后的超声声像图进行研究分析,解决了HIFU辐照前后图像必须进行配准的难题,有利于减少手动定位的误差,为有效监控HIFU治疗提供了重要方向。3 HIFU损伤识别



4 实验结果与分析
5 结论
