千瓦级机电伺服控制驱动器研制
2018-11-05龙海峰姜迪开刘俊琴林强强
龙海峰 姜迪开 刘俊琴 林强强


摘要: 本文介绍了一种千瓦级伺服控制驱动器功能组成以及控制方法,分析了主要电路结构,通过相关特性试验,证明了该控制驱动器具备良好的性能和较高的可靠性,探讨了千瓦级控制驱动器产品在机电伺服控制领域的应用前景。
【关键词】千瓦级 机电伺服 控制驱动器
1 概述
随着电力电子技术及控制技术的高速发展,机电伺服产品以其结构组成简单、加工装配容易、制造维修方便等优点越来越受到各方用户的青睐。如今,工业伺服领域大量应用各种永磁直流电机,而千瓦级直流有刷电机在伺服领域更是得到广泛重用。因此,研制一款性能优良、可靠性高的千瓦级有刷电机伺服控制驱动器是该类机电伺服产品研发过程中十分重要的课题。本文介绍的伺服控制驱动器具有以下特点:
(1)充分发掘了控制芯片潜能,使一台控制驱动器同时操控两台千瓦级有刷电机。在保证产品性能的基础上,减小了产品的空间体积。
(2)采用基于M57962L的IGBT驱动保护电路,有效避免了功率器件的损坏,大幅提升了产品的可靠性。
(3)突破传统方式,采用更加可靠的软件控制策略,进一步提高了产品的性能和使用寿命。
2 硬件设计
2.1 控制方式
针对有刷电机的控制方式大致有以下三种:采用专用集成电路控制芯片、基于常规单片机、利用高性能的数字信号处理器(DSP)。利用专用集成电路控制芯片组建的控制系统简单、成本低廉,但是由于集成電路控制芯片在硬件上完成了从位置检测、译码,到脉宽调制输出的所有工作,系统功能不能进一步扩展,限制了专用集成电路控制芯片在一些特定场合的应用。大部分情况下,单片机发挥了作用,但是基于一般单片机的有刷电机控制系统无论是处理速度及精度上都难以和高性能的数字信号处理器相比。DSP的快速运算能力能够使数字控制系统实时地进行运算,其结构能够使控制系统能够实现更加复杂的控制算法,形成全数字式的有刷电机伺服控制系统。为了提高控制驱动器的性能,本产品采用电机控制专用DSP芯片TMS320FL2407A。
2.2 硬件组成
电机控制驱动器主要由三大部分组成,即电源变换板、控制电路板和功率板。
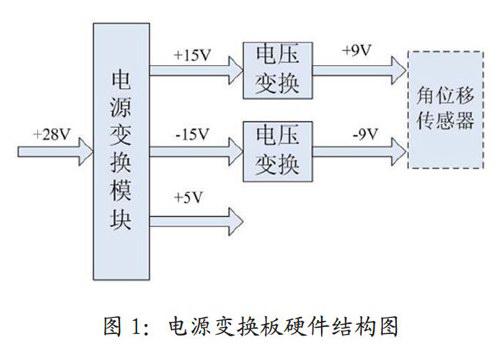
电源变换板主要由士15V和+5V电源变换模块以及外围电压转换器组成,其硬件结构如图l所示。
控制板主要由看门狗电路、电源管理芯片变换电路、DSP外围电路、SRAM电路、CPLD电路、A/D变换电路、D/A变换电路、信号放大电路等组成,其硬件结构如图2所示,
功率板主要由功率电路、电源变换电路、光电隔离电路、吸收保护电路和电流采样电路组成。功率器件选用IGBT模块(F4-150R12KS4),并配以专用驱动芯片M57962L,缓冲吸收保护电路采用RCD电路。其硬件结构如图3所示。
2.3 过流保护设计
对功率器件采用的过流保护可分为软件过流保护和硬件过流保护两种。软件过流保护实现方便,但要经过信号的A/D采集、转换、中断响应和软件处理等,所需时间相对较长。特别是在环境比较恶劣的情况下,当电流上升很快时,往往出现保护失败的现象。基于电流截止负反馈的保护是硬件上常用的过流保护方法,但是单纯地依据电流来判断功率器件的工作状态也不是十分到位,依然会出现一些应对不及时地情况。
针对以上问题,本产品在功率电路设计上选用了IGBT专用驱动芯片M57962L,它集成了驱动、光电隔离和过流保护等功能,所采取的过流保护是基于V。。管压降的过流保护法。这种过流保护法是根据功率器件在某一温度下管压降Vce与电流Ic的对应关系确定保护门限值,从而实现过流保护功能的。它具有极高的响应速度,且可根据功率管的实时工作状态实现电流保护,相对于以往的保护方式更有效。具体电路实现如图4所示。
3 软件设计及控制策略
DSP的软件主要包括主程序、零位采集程序和电机控制的定时器中断程序三部分。主程序负责完成DSP系统参数的初始化、控制参数的初始化、循环等待以及对看门狗置位;零位采集程序主要完成零位偏差值的采集;用于电机控制的定时器中断程序又包含以下程序模块,即位置闭环控制模块、电流闭环控制模块、PWM波发生模块、信号采集/处理/发送模块。本系统充分利用TMS320LF2407A强大的中断处理能力来处理位置捕获、电流采样、PWM波形产生以及闭环算法等。
4 试验及结论
为了考核该千瓦级控制驱动器的性能,对其进行系统带载的位置跟随、频率特性及暂态特性试验考核,其指标全部满足系统要求。
综上所述,该有刷电机控制驱动器已经实现了既定的功能,性能指标也较好地满足要求,在工程化产品研制中需在干扰的处理方面和性能优化上作进一步研究。本产品通用性较强,可扩展应用到相关工业伺服领域,市场开发潜力巨大。
参考文献
[1]王益全,张炳义等.电机测试技术[M],科学出版社,2004.
[2]徐德淦,电机学[M].机械工业出版社.2004.
