基于GPR反射波信号多维分析的隧道病害智能辨识
2018-11-05郭毅飞
郭毅飞
(朔黄铁路公司原平分公司)
1 引言
当今时代,以先进科学技术实现对隧道病害的智能化分析与辨识,对隧道病害的及时发现和解决,提高隧道的使用寿命和安全性具有重要意义。目前,GPR反射波信号技术是常用的隧道病害智能辨识方法,因此,对GPR反射波信号多维分析相关内容进行探究具有现实意义。
2 GPR探地雷达系统组成及工作原理
探地雷达是采用中心频率在10MHz~3GHz的高频电磁波探测地下或建筑物内部结构与特征的电磁探测技术,主要由发射天线、接收天线和控制单元构成,原理与反射地震学和声呐技术相似,即发射天线向地下发射高频短脉冲的电磁波,当电磁波遇到电性差异大的分界面或目标体时反射回地面被接收天线接收,根据接收天线记录的电磁波双程走时、振幅和波形等信息,可以确定地层结构或目标体的埋深和位置等。接收天线接收的电磁波根据传播路径主要分为空气波、地面直达波、反射波和折射波,根据研究需要选取不同雷达波进行分析计算,GPR常以脉冲反射波波形的形式记录接收到的雷达波,测线上不同测点的记录道构成完整的雷达记录剖面图。波形的正负峰分别以灰阶或不同颜色显示,等灰线或等色线表示反射层或目标体。
2.1 探地雷达系统组成
探地雷达系统主要由以下几部分组成:
1)控制单元
控制单元是整个雷达系统的管理器,计算机(32位处理器)主要对如何测量给出详细的指令。系统由控制单元控制发射机和接收机,同时跟踪当前的位置和时间。
2)发射机
发射机根据控制单元的指令,产生相应频率的电信号,由发射天线将一定频率的电信号转换为电磁波信号并向地下发射,其中,电磁波信号的主要能量集中向被研究的介质方向传播。
3)接收机
接收机将接收天线接收到的电磁波信号转换成电信号并以数字信息方式进行贮存。
4)辅助元件
电源、光缆、通讯电缆、触发盒及测量轮等辅助元件。
2.2 探地雷达工作原理
探地雷达工作时,向地下介质发射一定强度的高频电磁脉冲,高频电磁波以宽频带脉冲形式通过发射天线被定向送入地下,被接收天线接收。高频电磁波在介质中传播时,其路径、电磁场强度与波形将随着通过介质的电性特性和几何形态而变化。因此,通过对时域波形的采集、处理和分析,可确定地下界面或地质体的空间位置及结构。
3 GPR反射波信号的多维分析
3.1 GPR反射波信号的时域分析
近年来,GPR反射波信号已被广泛应用到各领域中[1],尤其在隧道施工和维护期间,借助GPR反射波信号可以实现对隧道内部相关信息的掌握。某公路隧道回填层地质雷达探测如图1所示,该公路隧道的测线长度共计18m,包含了360道雷达信号,其中,S1是该隧道中非隧道病害区域的反射信号,将其定义为非病害信号;S2是该隧道中病害区域的反射信号,将其定义为病害信号。时域分析是GPR反射波信号常用的分析方法之一。
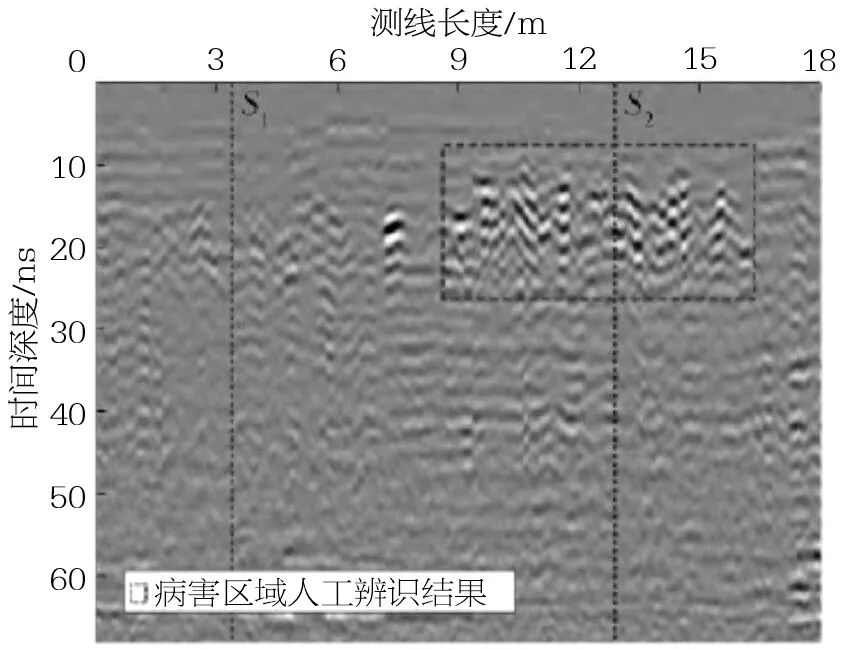
图1 某公路隧道回填层地质雷达探测示意图
在时域分析中,将电磁波反射信号设置为g(t),公式如下:

式中,t为时间记录;A(t)为GPR反射信号振幅函数;ω0为GPR反射信号中心频率;φ(t)为GPR反射信号相位函数。在一段时间间隔下,GPR反射电磁波信号会通过采样得到离散的信号,将其记录为S,其公式为:

式中,i为采样点;χi为采样点的信号值;N为采样点数。由此实现GPR反射信号的时域分析。
3.2 GPR反射波信号的频域分析
在GPR反射信号中,频域分析也是重要的分析方法[2]。该方法与时域分析方法相比,具有更加突出的优势。例如,该分析方法接收信息后,会进一步确定反射波信号中频率组成和分布等相关信息,由此实现对病害反射波信号频率特征的探究。在深入分析GPR反射信号的频域时,将离散非周期的雷达反射波信号设置为S,在相对离散的时间下,可以将其离散频域变换公式表示为:
式中,Xk为GPR反射信号离散的频率序列;j为反射波信号的估计土壤湿度;e为复指数;k为周期;χi指2π复指数序列下的周期,其与GPR反射信号的幅频和相频有密切的关系。
3.3 GPR反射波信号的时频域分析
GPR反射波信号的时频域分析方法主要是在时域分析方法与频域分析方法基础上研发出来的。频域分析可以借助傅里叶变换实现对频谱需要信号信息的提取[3]。目前,病害辨识中常用的时频域分析方法有傅里叶变换法和希尔伯特-黄变换法。傅里叶变换法是比较常用的时频域分析方法,希尔伯特-黄变换法是比较重要的时频域分析方法。希尔伯特-黄变换法由2部分组成,包括经验模态分解与变换[4]。在经验模态分解中,要对所有的信号进行假设,信号均由不同的本征模态函数构成,对于已经明确的雷达反射波信号g(t),应根据反射波情况计算雷达反射波信号上下包络线的平均值。同时,用已知的反射波信号减去均值后,得到候选的IMF函数,若该函数满足限定的反射波条件,则将其作为对应信号的最高频率分量。在此基础上,去掉高频序列信号,继续搜索后续的IMF分量,将其设置为ci(t),将剩余的信号设置为r(t),分解后的反射波信号公式如下:

4 GPR反射波信号多维分析下的隧道病害信号特征提取
4.1 隧道病害时域分析及特征的提取
在对隧道病害进行反射波信号多维分析时,主要以图1中的非病害信号S1和病害信号S2作为本次的研究对象。在隧道病害时域分析方面,首先从该角度实现对上述2道反射信号的综合分析。GPR反射波信号波形如图2所示,根据图中信息可以了解到,图2(b)中的虚线表示人工辨识环境下确定的隧道病害时间及深度范围。在反射波信号下的回填层不存在隧道病害时,其内部的介质会呈现出密实均匀的状态,主要是因为介质电磁的属性通常存在于回填层和围岩界面上。因此,GPR的反射波信号在回填层传播期间,反射减少,接收天线接收的反射信号可以将围岩界面反射电磁波作为主要信号。当回填层存在病害时,隧道病害的电磁属性与回填介质存在一定的差异性。在稳定的状态下,非隧道病害信号的最大振幅明显小于病害信号振幅,且最大振幅出现的深度要明显大于病害信号。根据图2中的波形信号显示,可以较科学地解释上述规律。
4.2 隧道病害频域分析及特征的提取
通常情况下,频域下的电磁波能量会在一定程度上随着反射波信号的传播而不断减弱,由此,会使电磁波的强度不断降低。若用β表示反射波信号的衰减系数,具体公式如下:
式中,ω为反射波信号的角频率;μ为磁导率;ε为介电常数;γ为介质电导率。
通过对该公式的分析,可以明确在GPR反射电磁波频率不断增加的情况下,反射波信号衰减系数基本上可以分为增加、平稳和急速下降3个阶段。同时,反射波信号衰减系数与频率之间存在着正向相关关系。
4.3 隧道病害时频域分析及特征的提取
目前,较多隧道病害采用时频域分析方法提取隧道病害的特征。在该方法中,希尔伯特-黄变换法是比较重要的分析方法,借助该方法可以快速且准确地提取隧道病害特征。GPR信号下,希尔伯特-黄变换法时频谱如图3所示。图中横坐标表示反射波信号的时间深度,纵坐标表示反射波信号的频率。在此基础上,5条本征模态函数分量的瞬时频率曲线构成时频谱,其中,最上方频率最大的曲线对应的是残余分量。对比非病害信号与病害信号的频率差异,非病害信号的本征模态函数分量,瞬时的频率主要集中于38ns和51ns时间深度上。病害信号的本征模态函数分量,瞬时的频率则分布于11~20ns。通过对希尔伯特-黄变换法下时频谱的分析,得到的关于信号在时域与频域中的分析结论具有一致性。
5 GPR反射波信号多维分析下的隧道病害智能辨识研究
智能辨识是公路桥梁等工程中常用的识别病害的智能化方法。智能辨识的分析主要借助先进的技术,如互联网技术和无线电频率识别技术等,对工程或建筑物进行识别,通过上述技术反映出的相关信息,对接收的反射波信号进行多维化分析,从而了解相关的病害内容。一般情况下,通过雷达探测实现对隧道病害的智能化辨识需要以下3个步骤:①从实测角度,对信号辨识典型特征的样本加以总结,得到二分类模型,通过对单道反射信号中病害信号的自动化判断,完成对隧道病害水平的自动化辨识;②对每道病害信号实施希尔伯特-黄变换法,通过该变换法中的本征模态函数分量,确定反射波信号中病害的具体位置,完成对隧道病害的辨识;③通过图像形态学方法对上述反射结果进行运算,减少错误次数,最终得到隧道病害的辨识结果。
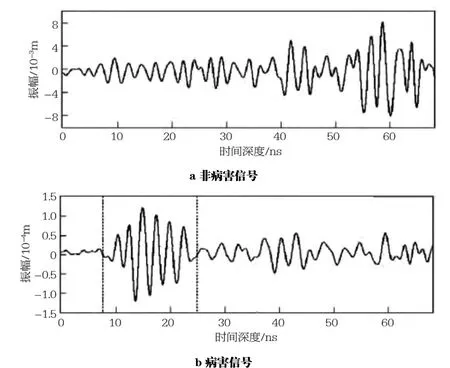
图2 GPR反射波信号波形
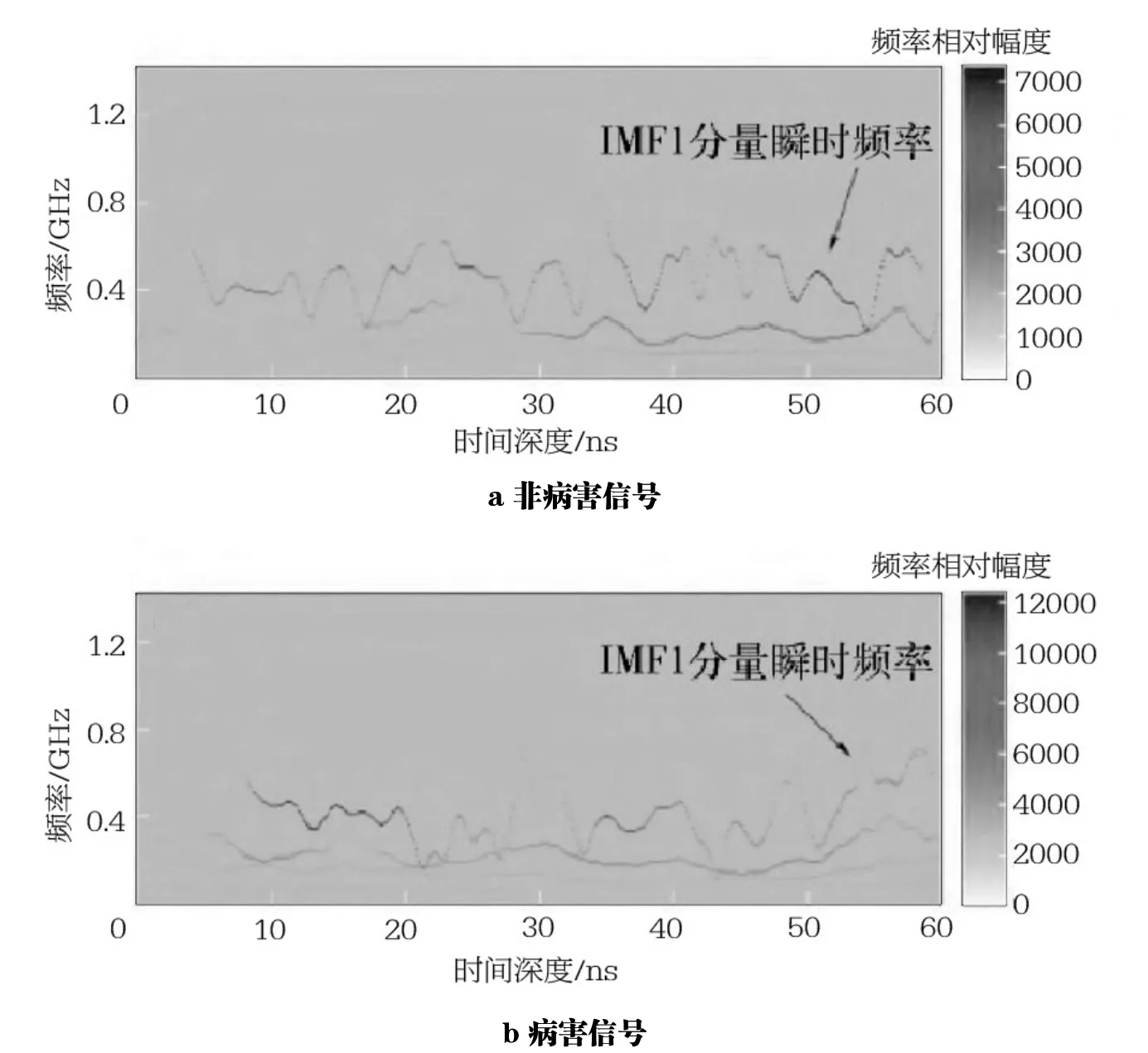
图3 GPR信号下希尔伯特-黄变换法时频谱
5.1 隧道病害水平分布范围的智能辨识
支持向量机是从统计学理论角度上发展起来的,属于二分类机器学习算法。在对隧道病害水平分布范围进行智能辨识期间,要采用支持向量机构建学习样本,结合人工对隧道辨识的具体结果,从不同隧道回填层雷达中探测所选取的数据。选取的数据信号分别为41道病害信号与41道非病害信号,分别取6个信号,将隧道病害信号记作负样本,将隧道非病害信号记作正样本。由于GPR反射信号容易受到噪声的干扰,因此,无论是正样本还是负样本,其隧道病害特征可能会与正常条件下得到的分析结论存在些许偏差。
5.2 隧道病害深度分布范围的智能辨识
在隧道病害智能化辨识过程中,借助GPR反射波信号实现对隧道病害深度分布范围的自动辨识尤为重要。通常情况下,病害信号多是来自于病害截面的反射波或由来自围岩和层面等位置上的反射波组成。与非病害反射波相比,病害反射波的振幅与能量都具有较多的特点。同时,病害反射波的传播距离更短,其所呈现的电磁波衰减更少。GPR反射波信号在经过希尔伯特-黄变换法后,所提取的本征模态函数分量,在一定程度上代表了反射信号的高频成分,以反射波信号中的病害信号本征模态函数为对象,通过搜索振幅的方式对病害信号中的病害反射波深度分布范围加以明确。其隧道病害深度范围的公式为:
式中,tu为隧道病害反射波上边界;td为下边界;tmax为本征模态函数分量振幅(包络最大值时间的深度);tmu为最大值上相邻的极大值点;tmd为最大值下相邻的极大值点。在此基础上的病害深度分布范围,与人工辨识结果基本一致。
5.3 隧道病害图像形态学的处理
对隧道病害水平分布范围与深度分布范围的智能辨识,从图像形态学角度实现对隧道病害的处理,可以快速掌握隧道病害。受诸多因素的影响,隧道病害水平范围与深度分布范围的自动辨识容易受到干扰,出现误判现象。基于此,在隧道病害辨识过程中,采用图像形态学的方法对得到的隧道病害辨识结果进行深入的分析和处理,可以有效提高隧道病害智能化辨识结果的准确性。首先,可以采用图像形态学中的腐蚀运算,除去相对零散的隧道病害标记,这种方式主要是消除可能存在误判的病害信号;其次,借助图像形态学中的膨胀运算,将较密集的隧道病害区域加以标记,将其规划为比较完整的隧道病害区,补充漏掉的隧道病态信号;最后,采用图像形态学中的开闭运算,得到隧道病害区域的分布图,隧道病害位置最终智能辨识结果如图4所示。通过图像形态学的处理,尽量避免原有隧道病害智能辨识结果的误判和漏判现象。
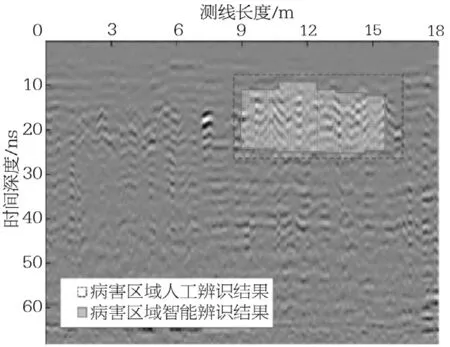
图4 隧道病害位置最终智能辨识结果示意图
6 结语
实践证明,探地雷达作为一种高效的无损探测技术,在隧道衬砌厚度、钢筋分布及衬砌背后空洞测量中取得了较为理想的探测效果,为隧道衬砌质量评价及其质量问题的改进提供了依据。探地雷达作为一种新的高分辨率且高效率的无损检测技术,具有施工快捷、数据采集与处理全自动化、探测精度高、目标物图像清晰且易为人们识别等特点,在隧道衬砌质量检测中有广泛的应用,在其他现代化工程建设中也有不可估量的发展潜力。
通常情况下,借助GPR反射波信号,可以快速实现对隧道病害的辨识,从而为隧道病害问题的解决提供有力保障。针对隧道病害智能辨识的现状,论文在研究中通过对GPR反射波信号的多维分析,从隧道病害时域及特征、病害频域及特征、病害时频域及特征方面,分析了如何借助GPR反射波信号多维分析,实现了对隧道病害信号特征的提取。此外,从隧道病害水平分布范围、深度分布范围、图像形态学处理等方面,研究隧道病害的智能辨识。希望本次研究可以为日后提升隧道病害智能辨识水平起到借鉴意义。
