水下线状目标距离选通成像探测研究
2018-11-05姜朝宇王亚波
姜朝宇,罗 涛,王亚波,夏 珉
(1. 海军驻葫芦岛431厂军事代表室,辽宁 葫芦岛 125004;2. 武汉第二船舶设计研究所,湖北 武汉 430000;3. 华中科技大学 光学与电子信息学院,湖北 武汉 430000)
0 引 言
水下电缆、石油管线等水下目标,在海洋勘探、资源开发等领域得到越来越多的应用,这些水下目标一般都是直接暴露在水中,水中盐分的腐蚀、水藻等植物的繁殖、海底沙床的移动、渔猎活动、船只下锚、鲨鱼等都有可能将其损坏,需要对其进行定期的检测和维护。现有的检测方法一般是使用载有光学系统的遥控潜水艇(Remotely Operated Vehicle,ROV)来采集水下图像,操作员在控制台前通过观察分析传送回来的图像信息来检查和跟踪管道目标[1],这种检测方法总体来说具有单调、检测时间长和费用昂贵等缺点,因此国内外都开展了对水下现状目标成像结果的自动目标识别算法研究。
早在1988年,H. G. Nguyen等提出了基于灰度分割和Hough变换的检测方法。该方法先利用管道和背景的灰度不连续性,用阈值法将管道分割提取出来,然后用Hough变换检测得到管道的位置和方向信息,在当时就达到1帧/s的检测结果[2]。1991年J. O. Hallset 提出了矩形匹配的检测方法。先对图像进行直方图均衡化以提升整体对比度,然后使用Sobel算子提取边缘,分析清除杂乱的边缘后进行矩形匹配[3]。2015年H. H. Chen等提出用于水下ROV导航的缆绳检测算法,该算法包括颜色空间转换、Canny边缘检测和概率Hough变换3个步骤,对于混浊水体中的缆绳图像,当仅随机采样40%的Canny边缘点时,检测率可以超过95%[4]。
国内的相关研究工作起步稍晚,其中哈尔滨工程大学在2007 ~ 2010年间,对基于粒子群优化和模糊熵的水下图像分割方法进行研究[5],基于该类方法的图像分割结果对光照和噪声影响具有较好的鲁棒性[6]。
针对水下线状目标的光电自动探测需求,本文设计了基于水下距离选通成像原理的水下线状目标探测成像探测系统,针对其成像结果的图像特征建立识别算法,实现对水下线状目标的实时检测。通过在实验船池中对水下线状目标进行探测实验,验证了算法的有效性和探测的可靠性。
1 实验系统设计
相比大气环境,由于水体及内部悬浮颗粒的存在,对激光存在吸收、散射等物理现象,前者导致水下激光衰减严重,后者使激光传播方向发生偏折,造成光学成像系统接收到的光信号信噪比大大降低,水下图像存在着严重的质量劣化问题。为了解决水体散射所引入的图像质量劣化问题,采用距离选通水下成像系统对水下线状目标进行成像探测,系统中选通门的存在能够有效降低由水体散射引起的噪声。根据测量原理以及实际需求,设计基于距离选通水下激光成像原理的系统,系统示意图如图1所示。
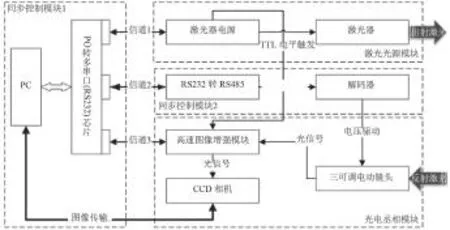
图 1 距离选通水下激光成像系统示意图Fig. 1 Sketch map of underwater range gated imaging system
距离选通成像系统由脉冲激光光源、高速选通相机和同步控制模块3部分组成,激光器发射出的短激光脉冲,经过扩束器进行扩束,前进达到目标所在区域。由目标反射回的光束,经由电动镜头和微通道板,到达CCD成像相机得到数字图像,并进一步由数据处理主板对图像进行处理分析。
系统中的同步控制模块可以精确地同步控制激光光束和选通相机快门开关的时间。当激光器开始发送脉冲时,距离选通过程开始。当光行进时,选通门处于关闭状态,因此不会捕获后向散射光。当被目标反射回的激光脉冲返回相机时,选通门打开,相机仅捕捉来自目标的反射光。一旦激光脉冲结束,选通门再次关闭。可见,通过精确的同步时间控制,距离选通系统可以有效抑制水体后向散射的影响。实验时使用的距离选通系统如图2所示。

图 2 实验使用的距离选通系统实物图Fig. 2 Photo of real objects used in range gated imaging experiment
实验在华中科技大学船池实验中心进行,实验前制作一块上深下浅的背景板放置于水中,用以模拟不同的水下环境。为了模拟水下线状目标,实验时先将目标板两端悬挂在推车上,缓缓放入水下。然后将直径3cm的黑色电力电缆两端悬挂放入水下,分别置于背景板的深颜色和浅颜色背景前,将推车推动到不同成像距离处采集实验图像,实验采集图像的分辨率为1 292×964像素。实验采用的背景板设计图和电力电缆如图3所示。
实验采用的是常规电力电缆,由4根相互绝缘的内部导线和外面绝缘保护层制成,绝缘保护层的主要成分为聚氯乙烯,外观呈黑色。由光学知识可知,由于黑色物体吸收照射到表面的绝大部分光谱范围,当将电缆放入水下进行成像时,理论上采集到的图像上会呈现出黑色的线状分布。同时由于目标板的上部分颜色较深,下部分颜色较浅,将黑色电缆放置在深颜色和浅颜色的背景前,就可以改变电缆所处的背景环境,从而检验目标检测算法的鲁棒性。
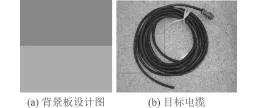
图 3 实验所用背景板设计图和线状目标Fig. 3 Design of background plate and baseline target in experiment
2 实验数据处理方法
图4为实验采集到的一幅图像。可以发现,由于水下成像较强的吸收和散射影响,采集的图像整体质量相对较差,目标特征不明显。在进行目标检测之前,需要有针对性的对图像进行增强处理,以突出目标的细节特征。

图 4 实验采集图像Fig. 4 Acquisition photo in experiment
2.1 图像预处理
图5为图像4中第500行的灰度值分布图,观察该图可以发现图像中相邻像素的灰度值变化非常大,存在明显的脉冲噪声,选择使用中值滤波算法来消除脉冲噪声的影响。
图6为使用5×5的方形窗口进行中值滤波后,原图像中第500行的灰度值分布图,可以发现,图像中的脉冲噪声得到了有效抑制,相邻灰度值的变化变得更加平滑。
图7为图4中图像的灰度分布直方图,可以看出,图像的灰度级集中分布在[10, 40]的一个小区间里,对比度明显过低,需要拉伸图像的对比度。
对比度拉伸(灰度拉伸)是一种应用广泛的图像增强方法,它是将原图像的灰度函数经过一个变换函
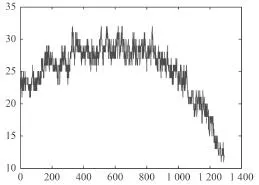
图 5 图像中第500行的灰度值变化图Fig. 5 Grayscale value variation of line 500 in the image

图 6 中值滤波后的灰度值分布图Fig. 6 Distribution map of gray value after median filtering
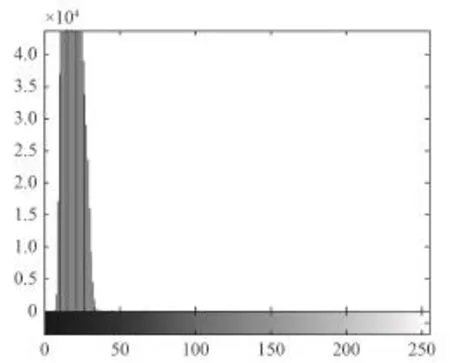
图 7 图像的灰度直方图Fig. 7 Grayscale histogram of the image

数变换成一个新的图像函数,其数学表达式为[7]:其中M为图像最大灰度值。采集到的图像灰度级为[0,255],即M=255。在针对实验图像处理中,取a=0,b=M,c=0,d=M,可以将图像灰度区间扩展到整个图像灰度动态范围[0, 255]上,从而增强了图像的动态范围。处理后的图像如图8所示。可以发现,通过对比度拉伸的简单处理,图像的对比度得到了明显的增强,目标的细节特征更加突出。
经过中值滤波和对比度拉伸后,图像中的脉冲噪声得到了充分抑制,但是图像中的噪声仍然很严重,需要进一步选取性能好的滤波算法进行处理。针对水下图像的特点,一般选择小波方法进行去噪处理。
可以发现,通过本节所用的图像增强方法,图像的质量得到了明显的改善,图像中的目标细节特征更加突出,可以通过后续步骤提取出目标特征并进行检测。

图 8 对比度拉伸后的结果Fig. 8 Result of contrast stretching

图 9 小波去噪结果Fig. 9 Result of wavelet de-noising
2.2 边缘检测
Canny边缘检测算子是John F. Canny于1986年开发出来的一个经典的边缘检测算法,目前在边缘检测性能和算法复杂性上的综合性能最优。Canny算子检测图像边缘的步骤首先要使用二维高斯滤波器对图像进行平滑,随后对图像灰度梯度的幅值和方向进行计算,最后为了实现对边缘的准确定位,对其进行非极大值抑制操作。
Canny算子本身具备较大的优势,使其在图像检测中能较好地保留边缘细节,取得不错的检测效果,也成为评价其他边缘检测方法的标准。将高斯滤波的分布参数 σ 选为2,双阈值中的高阈值 Th选为0.5,低阈值 Tl选为0.2。检测到的边缘如图10所示。
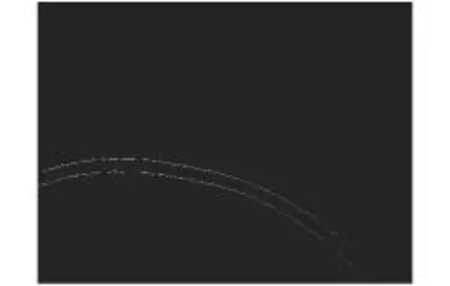
图 10 Canny算法检测边缘图Fig. 10 Canny algorithm detects edges
2.3 曲线拟合
考虑到Canny边缘检测后的结果中不可避免会存在虚假的边缘,即噪声边缘,需要采用抗噪声点干扰的曲线拟合算法来检测出图像中存在的曲线,从而提高算法的鲁棒性。基于此,选择RANSAC曲线拟合的方法,该算法的优点在于它能鲁棒的估计模型参数。
对于存在个别严重偏差的离散点序列,如果采用最小二乘法进行直线拟合,其拟合结果将会产生严重的误差。为了解决这一问题,本研究团队专门研发了改进型RANSAC算法,通过对RANSAC算法修正,引入预判函数,可以剔除距离较远的偏离点,得到一条理想的曲线[8]。
通过RANSAC迭代算法,用二次曲线拟合图像中的检测到的边缘,得到的检测结果如图11所示。

图 11 RANSAC算法拟合结果Fig. 11 RANSAC algorithm fitting results
3 水下线状目标探测实验结果
为测试算法性能,用距离选通系统在船池进行实验,在目标处于不同距离处拍摄了7组实验数据,目标对应的距离分别为12.5 m,15 m,17 m,18 m,20 m,21 m,22 m。同时,为避免实验的偶然性,每组实验采集2张图片数据。
3.1 算法稳定性测试
为测试算法稳定度,每组实验中使目标处于颜色深和颜色浅的2种背景中,使用前述算法进行处理,处理结果为:除12.5距离处目标处于深颜色背景中检测不到目标之外,其他距离处都能正确检测到目标,按目标距离和颜色深浅所得的检测结果如表1所示。
具体的检测结果如图12所示,可以发现12.5 m处背景颜色较深时由于目标和背景间的差别较小,无法检测到边缘,导致漏检。说明算法在目标和背景差别较小时,检测受到限制;同时,当距离达到22 m时,由于水下成像系统中的噪声干扰较大,会对检测的结果造成较大误差,特别是当处于颜色较深的背景中,目标和背景差别又较小,从而导致了图12(k)所示的情况。上述检测结果反映了算法的应用范围应为水下22 m左右。
3.2 算法速度测试
在实验算法测试环境下,对7组图片进行算法速度测试,每组图片的平均检测时间如表2所示。
从表2可以得知,算法的检测速度基本可以达到3帧/s的效果。
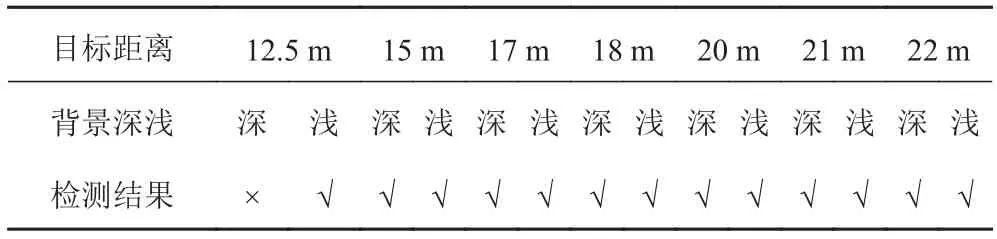
表 1 算法稳定性测试结果Tab. 1 Algorithm stability test results

图 12 算法检测结果Fig. 12 Algorithm detection results
3.3 总体检测率
以表1中的7组图片分析,本实验一共采集到14张图片,正确检测到目标13张,总体检测率12/14×100%=92.86%,说明本实验的总体检测率可以达到90%,同时考虑到本实验所用图片总数较少,可以进一步采集更多的图片来测试算法的有效检测率。

表 2 算法速度测试结果Tab. 2 Algorithm speed test results
4 结 语
本文基于距离选通光学成像探测系统,研究了长探测距离下的水下线状目标探测图像的处理算法,并通过水下探测实验研究了算法的有效性和可靠性。针对距离选通成像系统探测水下线状目标的图像特征,采用了结合图像中值滤波、对比度拉伸和小波去噪的图像预处理方法对图像质量进行提升,采用改进型Canny边缘检测算法对图像中存在的线状目标的边缘进行检测和识别,为了降低边缘检测带来的虚假边缘问题,采用了改进型RANSAC算法对水下线状目标进行曲线拟合。实验结果表明,本文提出的方法可在5倍水下衰减长度内,有效用于二次曲线状目标检测,在检测速度为3帧/s的情况下,算法的检测率可达到96%以上。且本实验选用的目标检测算法可以不受目标曲线阶数的限制,理论上可经过改进并用于任意阶数的曲线目标检测。