基于JPDA的智能船舶多源信息融合技术研究
2018-11-05范新刚管日升
范新刚,管日升
(上海船舶电子设备研究所,上海 201108)
0 引 言
当前,在民用和军用领域对智能船舶需求日益迫切,而船舶智能化、无人化是智能船舶技术的主要研究方向[4],智能船舶为了达到无人化和智能化,在智能船舶平台中会配置多个或多种传感器,例如避碰声呐、红外光电设备、导航雷达、AIS系统、GPS/北斗等来实现自主航行的安全性和可靠性。然而如何处理多个或多种传感器上传的互补信息和冗余信息来消除或减少冗余信息以及降低信息的模糊性,是本文的关键问题[6]。
本文采用智能船舶多源信息融合技术,使用目标位置特性和运动特性双跟踪门限的联合概率数据关联算法(JPDA)减少落入跟踪门内的冗余信息,并在信息处理过程中采用极大似然估计法对多个或多种传感器上传的船舶自身运动参数、周围静态环境信息、它船参数、海洋环境信息和岸基指控信息等进行同源划分,来降低联合概率数据关联算法(JPDA)的计算量[5],最终实现对多传感器信息的高质量融合估计,为智能船舶航运实时提供决策和控制信息,保障智能船舶自主航行的安全性和可靠性。
1 智能船舶多源信息融合技术
1.1 改进传统JPDA算法的必要性
传统的联合概率数据关联算法(JPDA)对单一传感器和多目标跟踪的处理效果较好,本文的智能船舶平台配置了包括避碰声呐、红外光电设备、导航雷达、AIS系统等多个或多种传感器,每个传感器都可能得到多个目标信息。在本文中的智能船舶多传感器、多目标跟踪的环境下,采用传统的JPDA算法主要存在计算量太大问题[7]。在探测到大量的目标信息出现在跟踪波门的相交区域内,并且这些目标信息可能对应多个传感器,造成了多个传感器的探测信息源于同一个目标,最终导致有效的关联事件数量与探测目标数量呈指数增长,运算过程中的计算量也会呈指数增长甚至造成计算量的爆炸[5]。
本文为了解决智能船舶多传感器、多目标跟踪的环境下多传感器多目标导致的计算量太大问题,采用基于位置信息的跟踪门1和基于运行特性的跟踪门2的双跟踪门设计思路,把目标的位置特性和运动特性结合起来,从而有效地限制关联门出现的冗余信息,并将智能船舶的避碰声呐、红外光电设备、导航雷达、AIS系统等多种传感器上传的信息进行同源划分,减少关联事件数量,降低了目标和探测数据之间的关联概率事件,从而达到降低 JPDA算法计算量的目的。
1.2 改进的JPDA算法设计
联合概率数据关联算法(JPDA)具体设计内容如下:算法假设存在M个目标,其算法方程和变量描述为:
式中:A为目标变量;C为测量变量;M,N为已知的矩阵量;X和Y为相对独立的变量,其中X为零均值的状态噪声变量,Y为零均值的探测噪声向量;t为i时刻探测到的目标。
定义i时刻目标t的关联区域为:

设i时刻的有效信息为n(i)个,记为Ci,1,Ci,2,···,,i时刻的有效信息集为值落入跟踪门限内时,多个检测目标可能会出现在相交区域,联合概率数据关联算法(JPDA)计算每一个检测目标信息与第一个探测值相关联的概率。设为在i时刻的所有联合事件值的集合,h表示 θ (i)中元素的数量,在设1,2,···,m(i),表示测量值j与目标t关联的事件。
依据全概率公式和JPDA相关的计算公式,可以得到目标在i时刻的滤波值为:
本文中的JPDA算法采用基于位置信息的跟踪门1和基于运行特性的跟踪门2的双跟踪门设计思路,跟踪门设计过程中,除了考虑目标位置特性外,还考虑了运动方向等运行特性,把目标的位置特性和运动特性结合起来,从而有效地限制关联门出现的冗余信息,降低了目标和探测数据之间的关联概率事件,降低了 JPDA 计算量的目的[9]。
基于位置信息的跟踪门1,在i时刻以目标t的位置预测数据中心所建立的跟踪门1的体积为Vt(i)=ϕMγM/2|Wt(i)|1/2,其中自由度为M,
本文中的传感器为避碰声呐、红外光电设备、导航雷达、AIS系统等,可以提供目标运动方向或速度等运行状态相关的数据,故可在跟踪门1的基础上,引入速度特性。假设i时刻目标t的预测运动方向为θ和β,并且是落入跟踪门1区域内的一个有效回波探测目标,公式如下:

依据双跟踪门设计思路,降低落入跟踪门限交叉区域内的目标信息与传感器源的关联事件,本文根据传感器的集合进行极大似然法的同源划分,首先明确哪些探测目标值是哪个传感器探测的,即多传感器对多目标探测的同源分划。本文采用了极大似然估计法来解决这个问题[5]。
设在i时刻,在N个传感器对Q个目标的探测集合ZN中,每一传感器有mn(n=1,2,…,N)个探测结果。记i时探测结果集合为:

对某一{目标的探测信息集}合为:
Γli=Z1i1,Z2i2,...,ZNiN,其中i=1,…,Q,表示Q个目标集合,这就构成ZN个划分,共有L个可能分划集合,i=0,l=0时,为假目标集合。
1.3 智能船舶多传感器信息流设计
本文的智能船舶接收本船避碰声呐、测深声呐、光电传感器、导航雷达、AIS系统、GPS/北斗等传感器发送的航行数据和设备信息,以及接入岸基中心外部信息,通过自动感知和获得船舶自身位置、航速、航向等船舶运动参数,水深、港口设施、危险区等静态环境信息,它船位置、航速、航向等目标参数以及风、波、浪、涌、潮、气象等海洋环境信息和数据,结合智能化电子海图,为智能船舶航运实时提供决策和控制信息,以使智能船舶航行过程更加安全、可靠。
智能船舶获取雷达光电、避碰声呐、AIS等实时数据,实现实时监测目标的动态信息,通过本文的JPDA多源信息融合技术,解决传感器空间覆盖区域中的冗余信息,对各类传感器同步控制和协同探测,克服多种或多个传感器的应用环境、作用距离、目标识别能力不同等问题[1],通过采用信息优化技术、数据转换技术、数据相关技术、态势分析评估技术和融合推理技术,实现在航线选择、船舶避让等方面的优化,生成正确的航行决策[2–3]。智能船舶多传感器信息流设计框图如图1所示。

图 1 智能船舶多传感器信息流设计框图Fig. 1 Intelligent multi-sensor information flow design block diagram of the ship
本文智能船舶多传感器信息处理原理框图如图2所示。

图 2 多传感器信息处理原理框图Fig. 2 Multi-sensor information processing principle block diagram
2 仿真设计与结果分析
为进一步验证本文提出的JPDA算法有效性和可行性,采用Matlab(版本号R2015b)软件进行仿真试验验证,采用2个水下目标(目标M和目标N)进行模拟,2个目标都是匀速直线运动,探测水下目标的传感器选用避碰声呐,传感器测距标准差均为10 m,传感器的虚警概率为0.01,落入跟踪门限检测概率为0.85,对应正确量测目标落入跟踪门1的概率为0.99,对应正确量测目标落入跟踪门2的概率为0.99,各个传感器的扫描周期为1 s。仿真结果如图3~图5所示。

图 3 目标实际航迹仿真图Fig. 3 Target track simulation diagram

图 4 目标杂波和估计位置航迹图Fig. 4 Goals clutter and the estimated position track diagram
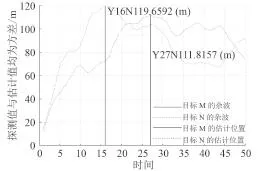
图 5 目标探值与估计值误差分析图Fig. 5 Target error analysis diagram agent and estimated values
其中图3为在上述设定条件下,仿真2个真实目标M,N的实际运动航迹和实时位置,实线2为目标M航迹,实线1为目标N航迹。图4为避碰声呐探测到目标M和目标N的杂波和估计位置,可见算法对杂波的处理效果还是比较明显,线1虚点为目标M杂波航迹,线2虚点为目标N杂波航迹,线1实线为目标M估计位置航迹,线2实线为目标N估计位置航迹。图5为2个目标的位置探测值与位置估计值误差分布显示。由此仿真结果可知,验证了本文采用此算法的可行性。
3 结 语
本文主要介绍智能船舶的发展前景,智能船舶多源信息融合技术是智能船舶集成系统的关键核心技术之一[1],描述了基于改进的联合概率数据关联算法(JPDA)的智能船舶多源信息融合技术,详细分析了JPDA算法模型,提出了智能船舶多传感器、多目标跟踪的环境下多传感器多目标导致的计算量太大问题,并给出了解决方法。基于位置信息的跟踪门1和基于运行特性的跟踪门2的双跟踪门设计,把目标的位置特性和运动特性结合起来,从而有效地限制关联门出现的冗余信息,以实现并增强智能船舶自主航行的安全性和可靠性,最后采用Matlab(版本号R2015b)软件进行模拟验证仿真,对仿真结果给出分析,验证了本文提出JPDA算法的有效性和可行性,本文对多传感器融合设计和智能船舶集成系统设计方面具有一定借鉴意义。
