脉冲星MCP探测器设计与在轨验证
2018-11-03徐延庭宫超林胡慧君张玉兔邵思霈史钰峰宋娟宋晓林
徐延庭 宫超林 胡慧君 张玉兔 邵思霈史钰峰 宋娟 宋晓林
(山东航天电子技术研究所,山东烟台 264670)
脉冲星是一种快速自转的中子星,它能够发出周期性的X射线。由于其周期非常稳定,不同脉冲星的辐射又具有自身的特征,这使得脉冲星能够成为用于导航的天然信号源,X射线脉冲星导航具有重要的实际工程应用价值,有着巨大的发展潜力[1-2]。但脉冲星X射线光子信号流量弱,需要灵敏度较高的探测器进行探测。微通道板(Micro-Channel Plate,MCP)探测器可以实现103~106高增益的电子倍增,从而实现微弱信号的探测。硬X射线调制望远镜(HXMT)卫星主载荷主要用于空间硬X射线的探测,MCP探测器作为搭载载荷所探测的X射线属于软X射线,二者在探测能段上有一定的区分。同时主载荷任务规划了对X射线脉冲星的观测,二者在探测目标上有共同之处。通过数据分析对比,可以获得更多脉冲星和空间X射线相关信息,为脉冲星导航技术研究提供更多经验。
文章论述了MCP探测器的设计,其中重点描述了X射线光子探头的设计,并对探测器在轨探测情况进行了介绍,最后对探测器数据处理情况进行了说明,给出了Crab脉冲星辐射脉冲轮廓的还原情况。
1 MCP探测器设计
1.1 MCP探测器基本原理
MCP探测器的基本原理如图1所示。

图1 MCP探测器基本原理图Fig.1 Basic principle of micro-channel plate detector
X射线光子通过输入窗和准直器(Micro-Pore Optic,MPO)打到光电阴极上,在光电阴极上产生电子,电子进入微通道板内,与微通道板内壁碰撞产生二次电子,电子在电场作用下产生多次碰撞,激发出的电子不断增多,发生类似雪崩现象,从而实现信号的倍增放大。倍增后的电子束入射到电荷收集阳极后在电荷收集阳极上产生电流信号,通过匹配电阻转化为电压信号后,由电子电路进行采集处理。其中,输入窗功能可以对紫外、可见光以及空间带电粒子进行屏蔽,同时保持1~10 keV软X射线的透过率。X射线光子探头采用聚酰亚胺镀铝薄膜作为光子探头的输入窗,其对X射线的透过率如图2所示。
为减少空间X射线背景辐射影响,需对X射线探测器的视场进行限制,使探测器只接收来自特定方向的X射线光子。因此,采用在探测器的前端加装X射线准直器的方式进行空间滤波。

图2 输入窗透过率曲线Fig.2 Curve of transmission rate of input window
准直器由对X射线具有很强吸收的铅玻璃制成,如图3所示。只有不与微孔壁发生碰撞的X射线光子才能到达探测器,微孔的直径和深度决定了所能接收的光子的视场。采用MPO器件作为准直器,其质量和体积得到大幅度削减。
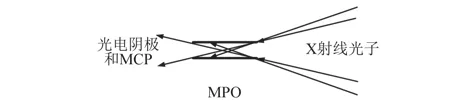
图3 MPO视场示意图Fig.3 MPO field-of-view diagrammatic sketch
X射线脉冲星的辐射能流强度非常低,为保证X射线探测器具有足够高的灵敏度,X射线探测器的光电阴极必须具备非常高的量子效率。高量子效率光电阴极可提高探测效率,缩短探测积分时间。在1~15 ke V的X射线能区,CsI材料具有量子效率高,稳定性好的优点。因此,本文采用CsI反射式阴极作为X射线光子的光电转换器件,CsI蒸镀在MCP的信号输入面上。
MCP是一种大面阵的微通道电子倍增器,具有很高的时间、空间分辨率。MCP工作原理如图4所示,在MCP的两端施加1~2 k V高压,当带电粒子或高能光子撞击MCP的输入端通道内壁时就会产生次级电子。次级电子在高压电场的作用下沿着微通道加速前进,通过与通道内壁的多次反复碰撞实现电子雪崩,最后在MCP的输出端输出大量的电子。两块MCP可以达到106~107的电子增益[3]。
电荷收集阳极为微带线结构,板基材为聚四氟乙烯,通过基材和匹配电阻实现50Ω的阻抗匹配。收集到的电信号通过屏蔽同轴电缆输出。
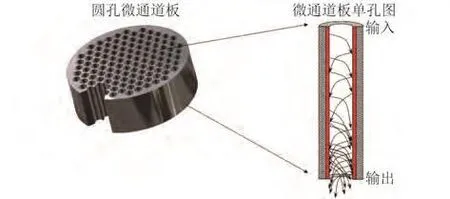
图4 MCP结构示意图及MCP的电子雪崩过程Fig.4 Micro-channel plate diagrammatic sketch and its electronic avalanche proces
1.2 整体电路设计
探测器子系统整体电路框图如图5所示。
综合控制器是探测器子系统的管理控制核心,实现如下功能:探测器子系统与卫星平台的接口,包括一次母线供电接口、遥控遥测接口、1553B总线接口和GPS信号接口;为光子探头密封门开启机构供电,控制密封门开启;通过RS422接口与高压配电器通信,控制高压电源输出,接收高压遥测数据;接收光子探头输出的脉冲信号,对信号进行调理、时间和数字转换(TIME-to-Digital Converter,TDC)处理,生成科学数据;将科学数据缓存,通过1553B总线下传。
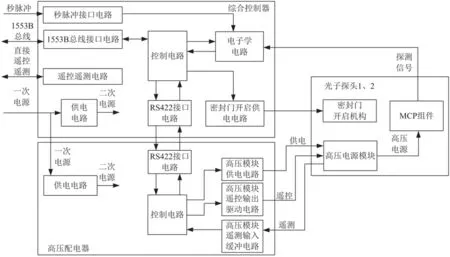
图5 探测器总体电路框图Fig.5 Whole circuit diagram of the detector
2台光子探头实现对X射线光子的探测。光子探头在密封门开启之后接收X射线光子,将光子转换为电子,对电子进行倍增放大之后形成电流脉冲信号输出。
高压配电器通过RS422接口与综合控制器通信,接收指令为光子探头中的高压电源模块提供供电电源和遥控信号,同时对高压电源模块的遥测信号进行采集并将遥测数据上传至综合控制器。
1.3 光子探头设计
光子探头实现X射线信号的光电转换和倍增放大,属于探测器的关键组成部分。X射线光子探头核心部件为MCP板,该板为微孔玻璃结构,易碎、易附着多余物,且难以清理,光电阴极材料采用了CsI,该材料易潮解。上述部件和材料特性对X射线光子探头的结构和机构设计提出以下要求。
1)减震
确保X射线光子探头在发射过程中能够承受振动、冲击等力学环境,振动敏感的 MCP不发生破坏。
2)密封
光子探头内部的光电器件MCP以及CsI光电阴极对洁净度、湿度要求较高,需要在密封环境下储存。为此光子探头需要配套密封机箱,确保在地面储存、运输以及发射阶段光子探头的性能不发生变化。
3)开启机构
卫星入轨后,为了探测X射线脉冲星源必须能够顺利开启密封门,否则会直接导致搭载试验失败。因此需要设计高可靠密封门开启机构,实现密封门的开启。
4)空间环境要求
X射线光子探头的结构和机构除了为内部功能部件提供减振和密封环境外,产品的结构还要适应空间环境要求,为功能部件提供抗力学、散热、辐照屏蔽、防静电和电磁屏蔽防护功能。探头结构如图6所示。

图6 X射线光子探头结构Fig.6 Structure of X-ray photon detector
图6 中,主体为探测器结构的主要部分,所有零部件均固定于主体,主体上还开有走线槽用于电缆铺设。密封门通过转轴与主体连接,密封门上镶有密封圈,密封门和主体通过压紧机构压紧,实现整个箱体的密封,密封门通过扭簧扭转开启,密封门同时设有门顶,门顶用于提供密封圈粘连或门轴静摩擦力较大时门开启的初始动力。压紧机构通过记忆合金驱动组件和电机驱动组件共同提供动力输出进行解锁。记忆合金驱动组件和电机驱动组件可以独立工作,工作过程中互不影响,也可以同时工作,提供的驱动力为两者之和。充气阀和泄压阀用于高纯氮气的充入和探测器发射过程中气体的自动泄出,二者结构相同方向相反,通过自动泄压防止在太空中探测器密封腔内余压过大,造成密封门开启困难,以及开启过程中气流冲击滤光膜而造成损坏。减振支柱用于探测器内部MCP组件的减振,减振柱采用硅橡胶或阻尼橡胶支撑,具有弹性和阻尼特性,减振支柱上下对称布置于MCP组件周围。减振支柱和MCP组件组成的振动系统的一阶振动频率需要控制在较低水平,同时避开卫星固有频率,可以获得理想减振效果。指向调节钉用于MCP组件指向精度的调整,该调节钉可以控制减振支柱的压缩力,从而调整减振支柱长度,进而调整MCP组件的指向精度,并使MCP组件的指向与光学基准镜的指向保持一致,光学基准镜的指向即代表了各MCP组件的指向,用于探测器安装于卫星探测器整体指向的校准。
MCP组件是光子探头内部的核心组件,MCP组件由输入窗(即滤光膜,材料由铝(AL)和聚酰亚胺(PI)组成)、准直器 MPO、光电阴极CsI、微通道板MCP、电荷收集阳极、高压电极和相应的支持结构组成,如图7所示。
MCP组件采用的微通道板属于真空器件,对灰尘十分敏感,少量的灰尘污染就可能导致MCP的放电损坏或性能下降。而且光电阴极材料CsI容易潮解,所以MCP的组装需要在千级干燥净化间的百级净化台上进行,组装过程严格控制洁净的和干燥度,组装过程中使用了专门的组装工装,MCP组装工装实物照片,如图8所示。

图8 MCP组装工装照片Fig.8 Photo of micro-channel plate assembling fixture
2 在轨验证
HXMT卫星发射入轨后,MCP探测器开启了密封门并进行了加电测试。经测试各部分功能正常后,进行了指向背景的测试和对Crab脉冲星的观测。
2.1 在轨背景测试
卫星主载荷有巡天、定点和小天区扫描三种探测模式,在主载荷未对准X射线脉冲星源的情况下,探测器进行了开机测试,测试背景值。开机测试探测器各通道计数率曲线如图9所示。
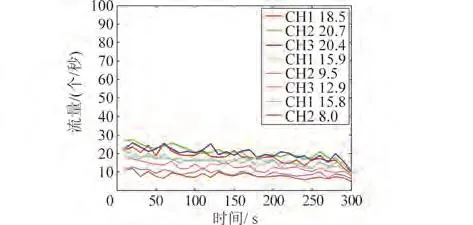
图9 背景探测计数率曲线Fig.9 Count rate curve of background detection
通过图9的计数率曲线可以看出各通道计数率均在每秒30个光子以下(图9中右上角数字代表每个通道的平均计数率),略高于地面标定值,经过分析主要是因为辐射带、银河宇宙射线、太阳宇宙射线等辐射影响造成的。对采集到的背景数据进行时间间隔统计分析,得到曲线如图10所示。

图10 时间间隔统计Fig.10 Statistics of time interval
从图10可以看出,探测器采集到的数据的时间间隔服从负指数分布,符合空间X射线背景辐射随机性特征。
2.2 Crab脉冲星观测
探测器在指向背景的测试完成后,对Crab脉冲星进行了观测,并对观测数据进行了轮廓累积处理,整个处理过程包括按照时间修正理论对数据进行时间转换、选取星历参数、累积折叠轮廓。
通过轮廓累积处理,搜索到频率f=29.641 3,周期P=33.736 7 ms的周期性信号。并利用该周期还原出轮廓,得到的轮廓如图11所示,与Crab脉冲星轮廓吻合。
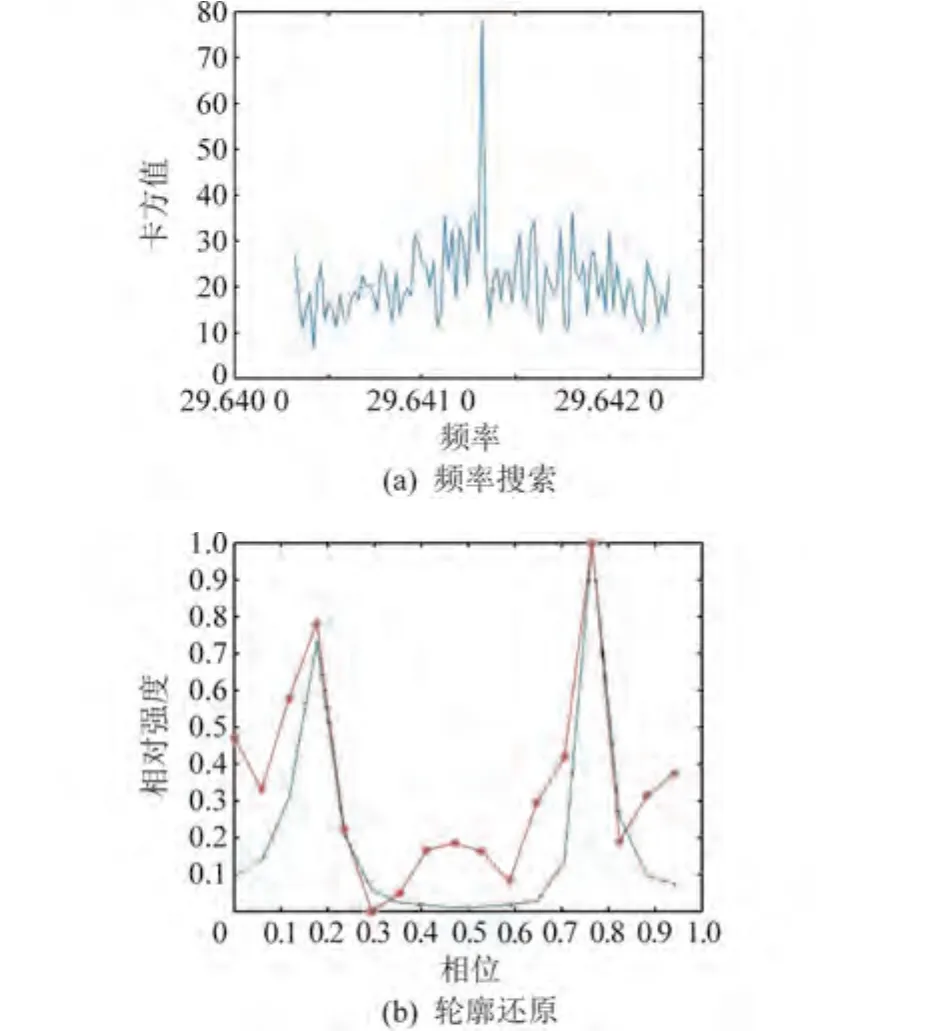
图11 搜索到的频率和还原出的轮廓Fig.11 Frequency be searched and profile be reverted
为验证得到的数据,进行了双周期的搜索,搜索到同样的频率和周期,得到双周期的轮廓,如图12所示。双周期轮廓与Crab脉冲星轮廓也能够吻合,对观测结果进行了验证。

图12 双周期搜索到的频率和还原出的轮廓Fig.12 Frequency be searched and profile be reverted in two periods
3 结束语
HXMT卫星为MCP探测器提供了可靠的供电、温度和指向控制。卫星平台对探测器的任务规划,指令上注和数据下传等过程给予了充分支持。在探测器开机初期,进行了开关机时机、数据传输时间、探测轨道等的调试测试,使探测器处于最佳工作状态,探测器探测数据完整下传,通过地面处理分析,获得了理想的探测数据。
脉冲星导航作为一种新的导航机制,已成为各国研究的热点,但由于脉冲星信号较弱,航天器运行的空间环境又极其复杂,通常包括辐射带、银河宇宙射线、太阳宇宙射线、弥散X射线及次级效应等辐射粒子[4-5],这就需要研究背景噪声小,灵敏度高,面积大且质量轻的X射线探测器[6]。MCP探测器具有视场大,响应速度快,易于大面积集成等特点,成为脉冲星X射线探测器的一种实现手段。MCP探测器通过在轨试验,得到了其空间背景响应特性,成功地获取了Crab脉冲星信号,为脉冲星导航研究积累了宝贵的经验。
参考文献(References)
[1]帅平,李明,陈绍龙,等.X射线脉冲星导航系统原理与方法[M].北京:中国宇航出版社,2009 Shuai Ping,Li Ming,Chen Shaolong,et al.Principle and method of X ray pulsar navigation system[M].Beijing:China Astronautics Press,2009(in Chinese)
[2]帅平,陈绍龙,吴一帆,等.X射线脉冲星导航原理[J].宇航学报,2007,28(6):1538-1543 Shuai Ping,Chen Shaolong,Wu Yifan,et al.Navigation principles using X-ray pulsars[J].Journal of Astronautics 2007,28(6):1538-1543(in Chinese)
[3]潘京生.微通道板及其主要特征性能[J].应用光学,2004,25(5):25-29 Pan Jingsheng.Micro-channel plates and its main characteristic[J].Applied Optics,2004,25(5):25-29(in Chinese)
[4]Benton E R,Benton E V.Space radiation dosimetry in low-earth orbit and beyond[J].Nucl Instru Meth B,2001,184:255-294
[5]Lindborg L,Bartlett D,Beck P.Cosmic radiation exposure of aircraft crew:Compilation of measured and calculated data[J].Radiation Protection Dosimetry,2004,110:417-422
[6]全林,欧阳晓平.脉冲星导航X射线探测技术综述[J].现代应用物理,2014,5(2):98-103 Quan Lin,Ouyang Xiaoping.Review on development of X-ray detection technology for pulsar navigation[J].Modern Applied Physics,2014,5(2):98-103(in Chinese)