智能移动式喷药机的设计
2018-11-02高荣扬
高荣扬,陈 凯
(杭州电子科技大学机械工程学院,浙江杭州 310018)
植保机械对现代农业的发展有着重要的影响[1]。优秀的植保机械使得现在的农业生产更加高效、安全,是推动我国农业现代化的重要因素。我国植保机械发展较为缓慢,目前我国植保机械主要有小型的背负式的喷雾器、迷雾机和自走式的喷药机,这种机械的主要特点就是喷药效率慢,作业强度大,而且对人体危害比较严重,所以目前我国在中小型喷药机领域还存在严重的不足。到目前为止,先进的植保机械仍旧主要存在于欧美等发达国家,他们的很多设备都使用了目前较为前端的技术,喷药效率高,自动化程度较高,而且对人体危害性较小[2]。
基于此,笔者研究设计了智能移动式喷药机。该喷药机的设计主要针对于中小型大棚内农作物的喷药,与传统的背负式的喷雾器和迷雾机相比,该机械不仅提高了喷药效率,而且自动化程度较高,喷药过程中对人体危害较小,在一定程度上改善了目前国内中小型喷药机上的缺陷。
1 传动系统的结构设计
1.1整体结构设计该传动系统所要实现的功能:①适用于中远距离的大棚作物喷药。②能够根据不同作物要求调节喷头到作物的喷药距离。③能够根据不同的喷药行程调节喷头行走距离。根据这些要求利用solidworks三维绘图软件在建模环境下设计了传动系统的整体结构,如图1所示。
在设计过程中,底座的各个杆件之间以及杆件与板材之间均采用焊接的连接方式,这样确保了机械工作过程中的强度要求[3]。利用电动推杆来调节喷架的高度,从而实现不同高度农作物的喷药需求。
该机械动力方面采用了直流电机来提供牵引力,用蓄电池进行供电,这样避免了喷药车行走过程中布线杂乱的问题。喷药机的后轮底座采用了万向轮结构,可以方便在喷药结束后移到下一个位置,前轮使用大的行走轮,保证了喷药过程中行走的通过性。
1.2钢丝绳张紧力计算要实现喷架在钢丝绳上的水平直线往复运动,首先要限制钢丝绳的悬垂度[4]。钢丝绳的悬垂度由钢丝绳所受的张紧力和载荷重力共同决定,将钢丝绳视为没有刚性的悬链线,将喷架视为载荷,当喷架处于运行轨道中间位置时,钢丝绳的悬垂度最大[5],且喷架运动时是处于两钢丝绳中间位置,所以喷架分布在每根钢丝绳上的重力是一样的,每根钢丝绳所受张紧力相等[6]。现只分析单根承重钢丝绳的张紧力,将该传动系统简化如图2所示。
图2中,A端视为钢丝绳的固定端,B端视为钢丝绳所受拉力端,A、B两端的距离LAB为钢丝绳跨距,P点为喷头载荷所在位置,载荷重力为Fp,于是可得:
载荷P处的钢丝绳挠度
AP段重心坐标
PB段重心坐标
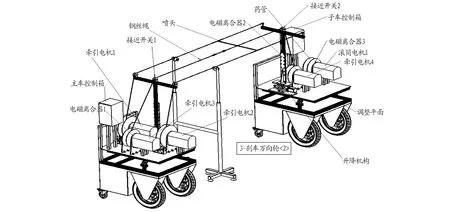
图1 传动系统的整体结构Fig.1 Overall structure of transmission system
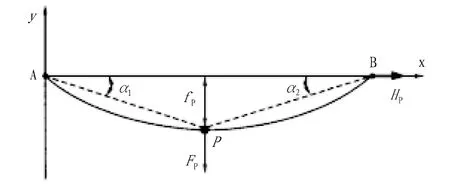
图2 单根钢丝绳受力模型Fig.2 Stress model of single wire rope
现要求该喷架在传动过程中下垂度fP≤0.4 m,取喷架行程x0≤30 m,忽略药管的重量,喷架自重Gp≤50 N,代入公式得张紧力HP≤810 N。
根据钢丝绳的最大张紧力[7],计算钢丝绳的直径d:
其中当安全系数n=3时,钢丝绳的选择系数C=0.07,S为钢丝绳所受张紧力[8],由计算结果得知,预选2 mm钢丝绳符合张紧力的要求。
1.3传输系统的工作流程该系统采用的是3根钢丝绳传动的机构形式,将承重功能和牵引功能分开。使用2根直径为2 mm的钢丝绳作为承重钢丝绳,再使用1根1 mm的钢丝绳作为喷架的牵引钢丝绳,来实现喷架的往复喷药动作。
2根承重钢丝绳的一端分别固定在子车的钢丝绳固定处,两车上分别装有85 kg的配重,2根钢丝绳的另一端分别连接在主车上的2个钢丝绳绕线器上。当母车启动后,主车上的2个张紧电机转动后,承重钢丝绳收到810 N的张力而张紧,此时喷架在两车上的牵引电机的作用下实现往复喷药工作。
工作时,按下主车上的启动按钮,张紧电机1和张紧电机2正向转动拉紧2根导轨钢丝,当主车支撑架上的2个张力开关达到设定值后,分别停止张紧电机1和张紧电机2的转动,此时借助与张紧电机1和张紧电机2连接的绕线器的自锁功能,2根导轨钢丝处于拉紧状态。当2个张紧电机都停止转动后,电磁离合器1接通,牵引电机3开始正向转动,经过牵引钢丝绳带动喷架做一次行程的喷药。当喷架移动至行程末,靠近接近开关1时,电磁离合器1断开,牵引电机3停止转动,然后按下松开按钮,使张紧电机1与张紧电机2接通并反转一段时间后停止,使2根导轨钢丝松开,以方便两小车移动到下个位置做另一次喷药。
在2个小车移动到下个位置时,按下主车上的启动按钮,张紧电机1与张紧电机2正向转动拉紧两根导轨钢丝。然后按下子车的开始按钮,接通电磁离合器2和电磁离合器3,同时牵引电机4与滚筒电机5正转,此时喷头在牵引电机4的拉力下进行第2次的喷药,药管由滚筒电机5进行回收,当喷架移动至行程末靠近接近开关2时,电磁离合器2断开,牵引电机4停止转动,然后按下主车松开按钮,使张紧电机1与张紧电机2接通并反转一段时间后停止,使2根导轨钢丝松开。
2 可编程逻辑控制器(PLC)控制系统的设计
2.1控制系统硬件配置该控制系统选择PLC作为控制中心。因为PLC的环境适应性较强,功能容易扩展,而且后期故障处理较为简单[9]。在该传送系统中只有数字量的输入与输出。根据控制流程,在母车的PLC控制系统有2个输入按钮,1个接近开关,1个张力开关,一共4个输入信号,输出信号有7个,都是用于电磁阀控制的。在子车的PLC控制系统有2个输入按钮,1个接近开关,1个张力开关,一共4个输入信号,输出信号有3个,都是用于电磁阀控制的。
综上参数考虑,选择S7-200 cpu224XP/CN继电器输出型PLC,其外型如图3所示。
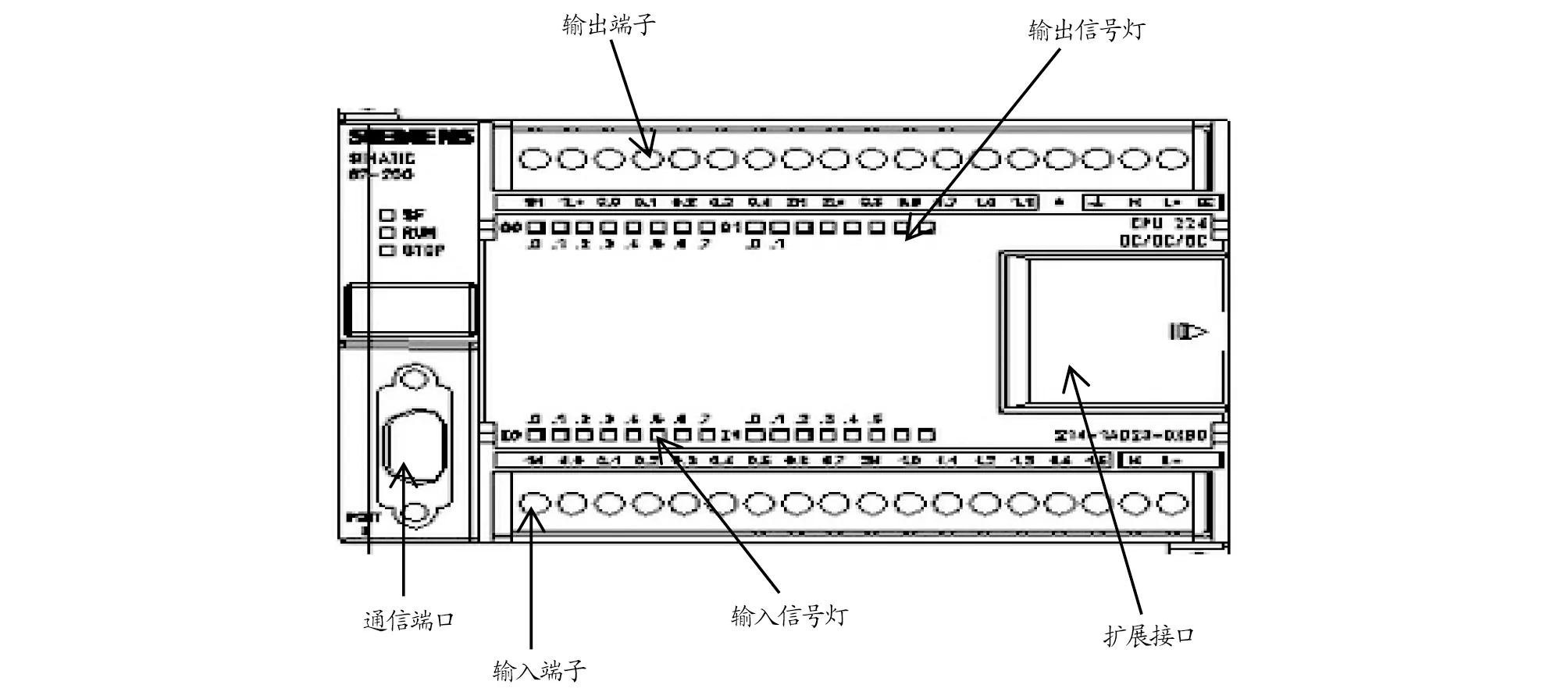
图3 S7-200PLC cpu224XP/CN
2.2PLC的I/O分配根据该喷药机要实现的功能,总结该控制系统的各个信号,将控制信号的功能进行分类,然后按照信号执行的先后顺序,绘制出PLC的I/O分配表。PLC的外部I/O信号与PLC的I/O接点地址编号见表1和表2。
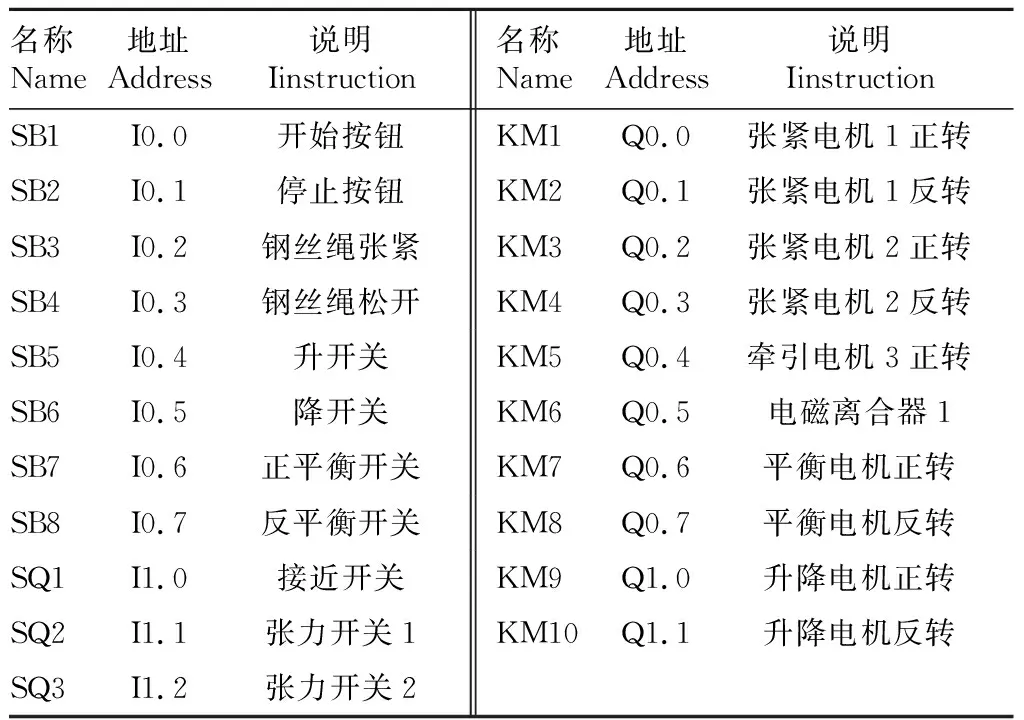
表1 母车控制系统I/O分配
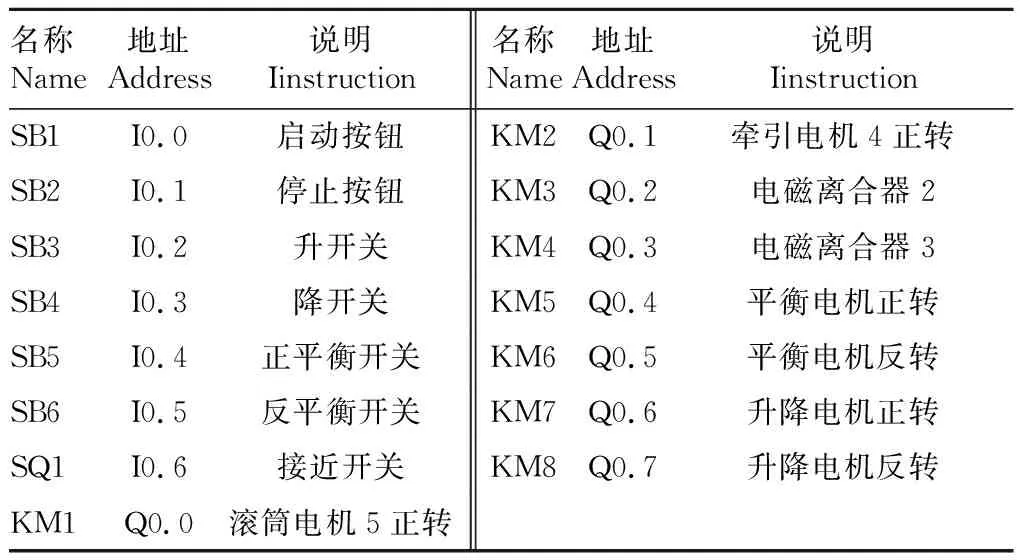
表2 子车控制系统I/O分配
根据控制系统的I/O分配表,可以绘制出I/O接线图,主车的I/O接线如图4所示,子车的I/O接线如图5所示。
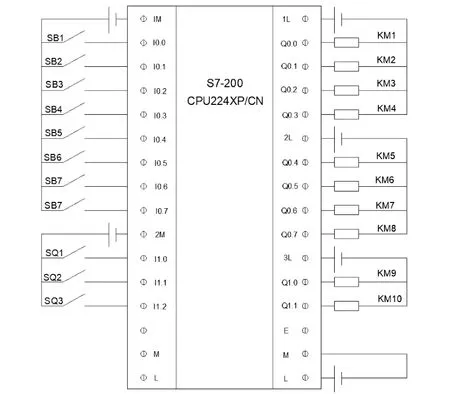
图4 主车I/O接线图Fig.4 Wiring diagram of main vehicle I/O

图5 子车I/O接线图Fig.5 Wiring diagram of sub car I/O
在PLC的I/O接线图绘制完成后,就可以进行PLC软件程序的设计[10],由于该喷药机的控制信号都为开关量,而且运动逻辑较为简单,所以可选择使用梯形图进行程序的编写。
在该系统的PLC程序设计中,使用了西门子s7-200的编程软件STEP7 MicroWIN V4.0进行梯形图程序的编写。由于梯形图跟电器控制系统的电路图很相似,直观易懂,特别适用于开关量逻辑控制,所以PLC编程中梯形图也是使用较多的语言[11]。
3 结语
该机械的设计有效地提高了中小型大棚内作物打药效率,而且减少了人工打药时大面积的药物接触对人体造成的伤。
下一步要针对喷药过程中机械运行的平稳性以及喷药效率做进一步的优化,改善两车的升降机构和支撑机构,以适应更远的喷药距离。
