斜撑式超越离合器二轴总成动态性能分析
2018-11-01刘志辉严宏志曹煜明
刘志辉, 严宏志, 曹煜明
(1.中南大学 机电工程学院,长沙 410083;2. 邵阳学院 机械与能源工程学院,湖南 邵阳 422000;3. 中南大学 高性能复杂制造国家重点实验室,长沙 410083)
超越离合器二轴总成结构为双速传动装置的关键部件,本质上是超越离合器与直齿轮耦合的转子系统,广泛应用于武装直升机、坦克、军用卡车、装载机等设备的变速系统中。超越离合器二轴总成结构的动力学行为直接影响整个传动系统的振动、噪声、可靠性、磨损以及寿命。尽管超越离合器二轴总成结构及双速传动装置应用广泛,但关于他们动力学研究的文献极其罕见。而单纯的齿轮动力学行为研究一直是国内外的研究热点,且大多数都与齿轮动态传递误差和啮合力有关。例如:Parker等[1]通过使用有限元接触力学模型分析齿轮动态传递误差均方根值与啮合频率的变化规律,其结果预测的多重共振、软弹簧、跳跃等非线性现象与实验结果十分吻合。Al-shyyab等[2]针对多级齿轮传动运用集中参数法建立考虑齿侧间隙的非线性时变动态模型,分别运用谐波平衡法和数值积分法对比研究载荷、啮合刚度、阻尼等参数对动态传递误差的影响。Wang等[3]构建一种考虑间隙非线性能适用于直齿轮、斜齿轮、螺旋锥齿轮及蜗轮的通用非线性时变模型,并分析了载荷平均值、啮合阻尼、啮合刚度、旋转半径、静态传递误差等参数对动态传递误差的影响规律。He等[4]建立考虑齿间摩擦和时变啮合刚度多自由度直齿轮动力学模型,分析摩擦力和齿面修形对动态传递误差的影响。Chen等[5]建立考虑摩擦和时变间隙的多自由度非线性模型,并分析摩擦力和时变间隙对动态传递误差的影响。Li等[6]针对一对直齿轮建立考虑弹流润滑的横-扭动力学模型,利用此模型可以有效预测齿面接触力。Liu等[7]分析齿轮啮合力对齿面磨损的影响,同时分析齿面磨损对齿轮副动态传递误差的影响。Liu等[8]分析轴承间隙和齿侧间隙对齿轮啮合力的影响。Sainte-Marie等[9]应用有限元法研究直齿轮和斜齿轮动态传递误差与动态啮合载荷之间的关系,并进行试验验证。Wang等[10]考虑由齿轮偏心和载荷波动引起的时变间隙,运用LS-DYNA3D分析载荷和齿轮偏心对动态传递误差的影响。张旭东等[11]建立一种啮合力计算模型,可计算新型转子压缩机工作时内、外转子之间的啮合力。陈安华等[12]建立一种考虑轮齿时变啮合刚度、啮合阻尼、轴承支撑刚度和阻尼的3自由度横向-扭转耦合动力学模型,并分析重合度、支撑刚度、啮合阻尼及轴承支撑阻尼等参数对齿轮动态传递误差的影响。毕凤荣等[13]基于MSC-ADAMS计算机仿真法,建立渐开线齿轮啮合传动的仿真模型,分析3种不同工况下的齿轮动态啮合力。刘辉等[14-15]建立一种考虑齿侧间隙、时变啮合刚度、相位差、综合啮合误差以及行星轮位置角的行星传动非线性动力学模型,对行星排啮合力进行了深入研究。张义民等[16]建立综合考虑时变啮合刚度、啮合阻尼、齿侧间隙、啮合误差等因素的2自由度直齿轮副非线性动力学模型,并运用四阶变步长Runge-Kutta法研究转速、扭矩对动态传递误差的影响。冯海生等[17]研究变工况冲击对齿轮传动系统动态特性的影响,分析工况冲击、啮入冲击、节点冲击下的齿轮动态啮合力。
对于超越离合器与齿轮耦合的系统,超越离合器与齿轮二者之间必定相互影响,为了探明超越离合器扭转刚度、阻尼等结构参数对齿轮传动误差、动载荷等动态特性的影响,以及齿轮重合度等结构参数对超越离合器动态溜滑角、最大冲击力、稳态接触力等动态特性的影响,必须掌握超越离合器二轴总成结构的振动机理。本文首次建立计及齿轮啮合刚度、啮合阻尼、轴承接触刚度、接触阻尼、离合器扭转刚度、扭转阻尼以及齿轮静态传递误差的横向振动和扭转振动耦合的4自由度非线性动力学模型,运用四阶变步长Runge-Kutta法研究了超越离合器结构参数对齿轮动态特性的影响,以及齿轮结构参数对超越离合器动态特性的影响,研究成果能为技术和工程设计人员针对此类系统进行动态设计和振动控制提供有用参考。
1 超越离合器二轴总成物理模型
超越离合器二轴总成结构简图如图1、图2所示,通常由主动齿轮组件、主动端支撑轴承、外环齿轮、斜撑块、内环组件、从动端支撑轴承组成。主动齿轮组件由主动齿轮和输入轴组成的一体件,内环组件由内环和输出轴通过平键连接组成。外环齿轮、斜撑块与内环组件构成超越离合器。当主动齿轮驱动外环齿轮顺时针转动时,带动斜撑块绕其转动中心顺时针转动而使外环齿轮、斜撑块以及内环组件楔紧为一体,从而实现驱动负载,相反当主动齿轮反方向驱动外环齿轮使其逆时针方向转动,或者外环齿轮转速低于内环组件转速时,斜撑块绕其转动中心逆时针方向转动使外环齿轮与内环组件松开,此时离合器为超越状态,不能传递负载。因此通过改变主动齿轮的旋转方向或者改变外环齿轮和内环组件之间的相对转速能够实现外环与内环组件的松开与楔紧,此结构用于双速传动装置中可实现其两种速度输出。

2.外环齿轮;3.斜撑块;4.内环组件
2 超越离合器二轴总成数学模型
图3为超越离合器二轴总成动力学模型示意图,此模型中两齿轮均为直齿轮,其中r1为主动齿轮基圆半径;r2为外环齿轮的基圆半径;I1为主动齿轮的转动惯量;I2为外环齿轮的转动惯量;Io为内环组件的转动惯量;m1为主动齿轮的质量;m2为外环齿轮的质量;kh(t)为齿轮副时变啮合刚度;其值可视为一矩形波,如式(1)~式(4)所示[18-19]:
(1)
kh/ktp=ε
(2)
(3)
φhr=atan((1-cos(2πr(ε-1)))/(sin(2πr(ε-1))))
(4)
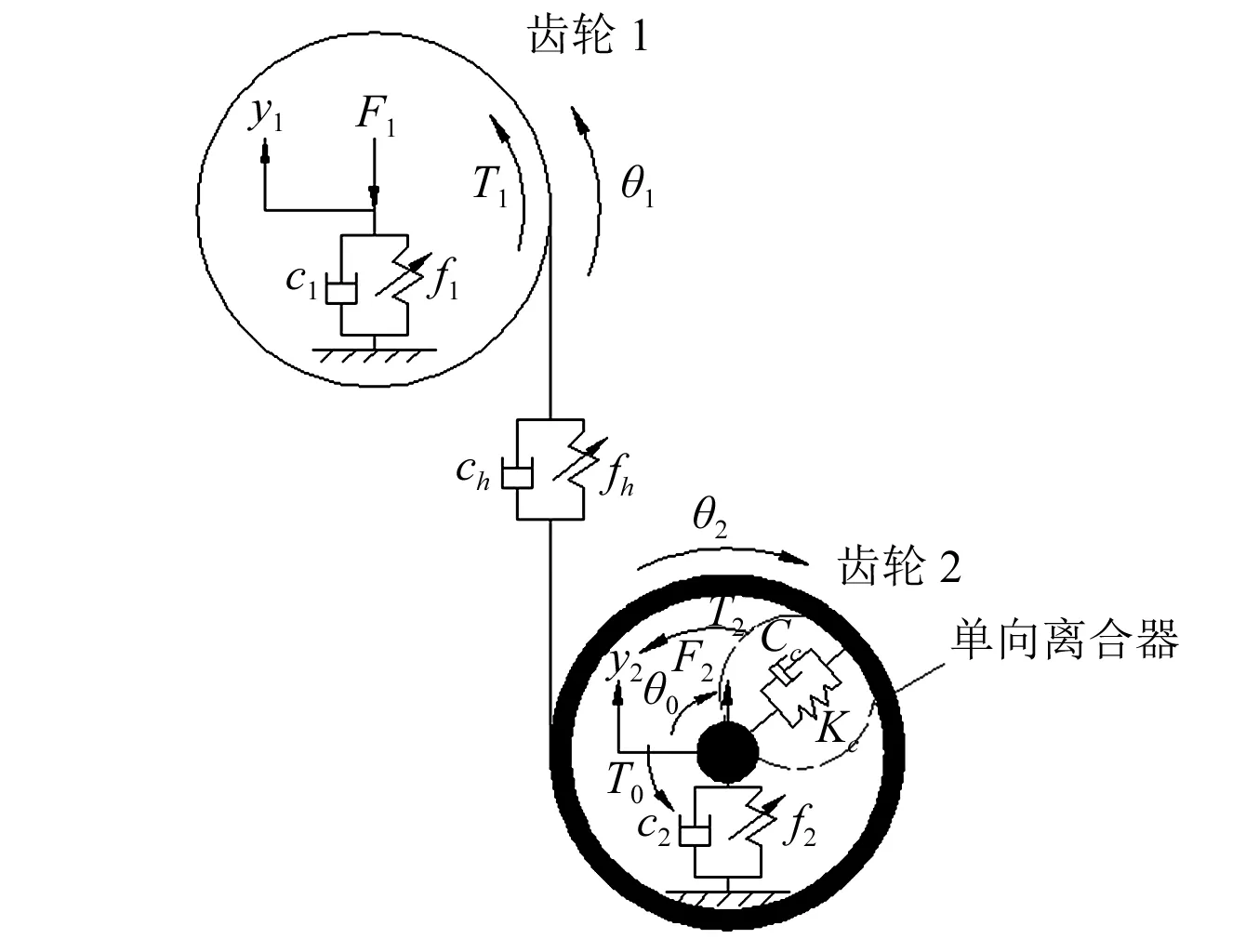
图3 超越离合器二轴总成的动力学模型Fig.3 Dynamic model of one-way clutch two shafts assemblies
式中:kh为时变啮合刚度平均值;khr为第r次谐波幅值;φhr为第r次谐波相位角;ε为齿轮重合度;取前五次谐波即可得到比较准确的精度,因此R=5;ch为齿轮副啮合阻尼;fh为齿轮啮合线上的位移函数;ci为轴承i的接触阻尼;Kc为超越离合器扭转刚度;Cc为超越离合器扭转阻尼;ki,fi分别为轴承i的接触刚度和位移函数(i=1, 2, 分别代表主动端支撑轴承, 从动端支撑轴承)。
假设两齿轮为未经修形的渐开线直齿轮,忽略输入轴和输出轴的扭转和弯曲变形,运用集中参数法和牛顿定律,可以推导出式(5)所示的五自由度非线性数学模型,
(5)
式中:yi,θi分别为齿轮i的横向振动和扭转振动位移(i=1, 2, 分别代表主动齿轮,外环齿轮);θo为内环组件的扭转振动位移;()′表示关于时间的微分;输入扭矩T1(t)为波动值,可表示为T1(t)=T1m+T1aT(t),其中T1m为扭矩的平均值,T1aT(t)为瞬时波动值,且可表示为T1aT(t)=T1aTsin(ωaTt+φaT);T2(t)为外环齿轮承受的扭矩,与超越离合器分段非线性位移函数fc(x)和速度函数fc′(x)有关,如式(6)~式(7)所示[19-20];To(t)为施加在内环组件上的扭矩,可取一恒值;F1,F2分别为预先施加在轴承1、轴承2上的载荷;e(t)为静态传递误差,与齿轮的制造和装配有关,可视为e(t)= êsin(ωet+φe)。
(6)
(7)
假设令r1θ1=yg1,r2θ2=yg2,r2θo=yco, 其中yg1,yg2,yco分别为主动齿轮、外环齿轮、内环组件在啮合方向上的当量线位移。通过定义新的变量q(t)=yg1-yg2+y1-y2-e(t) 和qo(t)=yg2-yco,q(t)为齿轮副动态传递误差,qo(t)为超越离合器动态溜滑角(外环齿轮与内环组件的相对转角差)与外环齿轮基圆半径之积,方程组5可以进一步简化为方程组(8):
(8)
式中:mc为齿轮副的等效质量,如式(9)所示;F1(t)为主动齿轮受到的动态啮合力;F2(t)为外环齿轮受到的动态啮合力;Fo为等效到外环齿轮基圆上的超越离合器阻力;式(10)~式(11)所示的分段线性函数fh(q) 和fi(yi) 包含了齿侧间隙一半值bh和轴承间隙一半值bi(i=1,2),齿轮啮合阻尼系数与啮合刚度满足关系式(12)。
(9)
(10)
(11)
(12)

(13)
式中:z1,z2分别为主动齿轮、外环齿轮的无量纲横向位移;F1m为主动齿轮受到动态啮合力平均值;F1aT为主动齿轮受到动态啮合力瞬时波动力幅值,与主动齿轮受到的波动力矩幅值有关;γ1为齿轮副无量纲动态传递误差;γ2为超越离合器无量纲动态溜滑角与外环齿轮基圆半径乘积。
3 参数研究

研究齿轮副动态传递误差及超越离合器动态溜滑角时利用均方根值和均方根误差来描述,见式(14)~式(15):
(14)
(15)
式中:x代表无量纲动态传递误差γ1,超越离合器无量纲动态溜滑角与外环齿轮基圆半径之积γ2。
表1 超越离合器二轴总成属性Tab.1 Properties of one-way clutch two shafts assembly
3.1 齿轮副动态传递误差分析
3.1.1 超越离合器扭转刚度影响分析

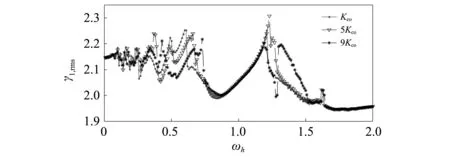
图4 不同超越离合器扭转刚度下齿轮动态传递误差均方根值Fig.4 Root mean square value of the dynamic transmission error of gear pair with different torsional stiffness of the one-way clutch
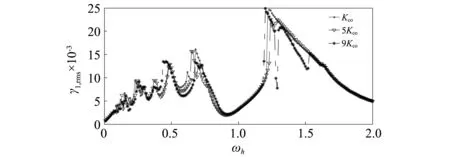
图5 不同超越离合器扭转刚度下齿轮动态传递误差均方根值误差Fig.5 Root mean square error value of the dynamic transmission error of gear pair with different torsional stiffness of the one-way clutch
3.1.2 超越离合器扭转阻尼影响分析


图6 不同超越离合器扭转阻尼下齿轮动态传递误差均方根值Fig. 6 Root mean square value of the dynamic transmission error of gear pair with different torsional damping of the one-way clutch
图7 不同超越离合器扭转阻尼下的齿轮动态传递误差均方根值误差Fig. 7 Root mean square error value of the dynamic transmission error of gear pair with different torsional damping of the one-way clutch
3.2 齿轮副啮合力分析
3.2.1 超越离合器扭转刚度影响分析
为了研究轮齿在工作过程中承受的最大啮合力随激励频率变化规律,采用动载系数Kv来描述。其中Kv定义为一个周期内齿轮或者离合器所承受的最大动载荷与法向静载荷之比,见式(16)。
(16)
图8是超越离合器二轴总成在不同离合器扭转刚度下的动载系数随激励频率变化规律,各参数取值与图4和图5一致。可以看出超越离合器扭转刚度对轮齿动载荷的影响与对动态传递误差的影响类似,当0.1≤ωh≤0.66时,增加离合器扭转刚度可以减少轮齿最大动载荷,0.67≤ωh≤0.87这一频段,通过增加离合器刚度虽然能减少跳频处(ωh=0.68)的动载荷,但在后续相同激励频率作用下最大动载荷会变大。当1.19≤ωh≤1.52时,扭转刚度增加到9Kco系统出现了明显的混沌响应,表现出刚度越大,动载荷越大,而在其他频段内的轮齿所受的最大动载荷基本不受离合器扭转刚度的影响。
图8 不同超越离合器扭转刚度下的齿轮动载系数Fig.8 Dynamic load coefficient of gear pair with different torsional stiffness of the one-way clutch
3.2.2 超越离合器扭转阻尼影响分析
图9是超越离合器二轴总成在不同离合器扭转阻尼下的动载系数随激励频率变化规律,各参数取值与图6和图7一致。由图可知,当Cc=Cco时,在不稳定区的ωh=0.19、0.23、0.33、0.7、1.26等频点处存在明显的跳跃峰值,轮齿存在接触冲击。当Cc增至9Cco时,表现出了明显的软弹簧特性,不稳定区的尖点峰值得到有效减缓,轮齿最大动载荷得到有效减少,而稳定区域轮齿承受的动载荷基本不受离合器扭转阻尼的影响。
图9 不同超越离合器扭转阻尼下的齿轮动载系数Fig.9 Dynamic load coefficient of gear pair with different torsional damping of the one-way clutch
3.3 超越离合器动态溜滑角分析


图10 不同齿轮重合度下的超越离合器动态溜滑角均方根值Fig.10 Root mean square value of the dynamic windup angle of one-way clutch with different contact ratio of the gear pair

图11 不同齿轮重合度下的超越离合器动态溜滑角均方根误差Fig.11 Root mean square error value of the dynamic windup angle of one-way clutch with different contact ratio of the gear pair
3.4 超越离合器接触力分析

(17)
(18)
由图12可知,在低频段内(0≤ωh≤0.92),齿轮重合度为1.4时离合器接合时产生的最大冲击力最小,在中频段内(0.93≤ωh≤1.38),齿轮重合度为1.15时,离合器接合时斜撑块与内外环之间的最大冲击力最小,且在这个频段内受重合度影响较大,重合度越大,离合器承受的接合冲击力越大,而在高频段内(1.4≤ωh≤2),离合器接合时产生的最大冲击力最小,且基本不受重合度的影响。图13表明,在整个频段内,齿轮重合度为1.15时离合器的稳态接触力最小,且最稳定,在中频段内,重合度越大,稳态接触力越大。

图12 不同齿轮重合度下的超越离合器最大冲击力Fig.12 Maximum impact force of one-way clutch with different contact ratio of the gear pair
图13 不同齿轮重合度下的超越离合器稳态接触力Fig.13 Steady contact force of one-way clutch with different contact ratio of the gear pair
4 结 论
(1) 为保证超越离合器二轴总成齿轮传动副具有良好的动态性能,具有较小的动态传递误差和较小的动载荷,低频段内超越离合器扭转刚度宜选取较大值,高频段内超越离合器扭转刚度宜选取较小值,中间频段和超高频段内动态传递误差和动载荷基本不受离合器扭转刚度影响。
(2) 取较大的超越离合器扭转阻尼,在低频段和高频段内可获得较小的动态传递误差和较小的动载荷,中间频段和超高频段内动态传递误差和动载荷基本不受离合器扭转阻尼影响。
(3) 为保证超越离合器二轴总成离合器具有良好动态性能,获得较小的动态溜滑角和较小的接触力,齿轮传动副宜取较小的重合度。
