运动模糊图像的恢复方法及其优化
2018-10-31袁江琛
袁江琛
(无锡城市职业技术学院, 江苏 无锡 214153)
引言
生活中由于景物运动,摄像设备的抖动,曝光时间过长等原因,拍摄出的照片会出现模糊现象。如何针对模糊图像进行模糊特征建模以及选择算法,最大程度复原清晰图像是有实际意义的。本文利用运动模糊图像退化及退化模型的建立,重点讨论鉴别线型运动模糊特征的算法,以点扩散函数(PSF)建立模糊模型,以及使用维纳滤波法还原图像。并针对维纳滤波的不足提出可行的改进方法。
1 图像退化及退化模型的建立
1.1 图像退化模型的建立
设原始图像为f(x,y),摄像机与物体的相对速度为v,曝光时间内相对角位移为θ,g(x,y)为实际拍摄的图像,则有如下关系:

(1)
此处先讨论无角度偏移的情况,则上式可简化为:

(2)
对上式离散化化简,结果为:
g(x,y)=∑f(x-i,y)/L
(3)
式中,L为像素数。此式表明一副模糊图可看成由多幅图像叠加而成。
1.2 点扩散函数的建立
(4)
对以上矩阵进行傅里叶变换得到:
(5)
由上式可看出h(u,v)与v无关,即为在一列中v的值是相同的。令:
(6)

1.3 模糊角度的确定
因为在模糊图像中存在大量的平行于运动角度的直线轨迹,所以只需要对模糊图像进行边缘检测即可快速地估计出运动角度。而边缘检测的基本思想就是针对图像中灰度有跳跃的地方标记出来,这些轨迹就是图像边缘。可使用sobel算子进行边缘检测,sobel算子思想为将两组矩阵与图像作平面卷积,即可分别得出垂直及水平的灰度差分近似值。
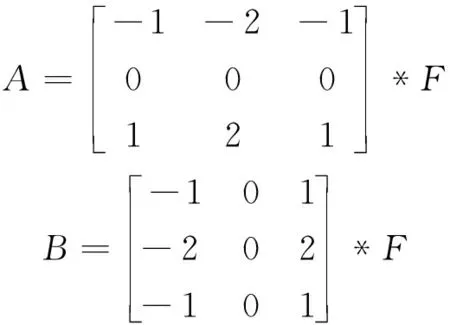
(7)

uSobel=imag;
fori= 2:high- 1
forj= 2:width- 1
Gx= (U(i+1,j-1) + 2*U(i+1,j) +F2(i+1,j+1)) - (U(i-1,j-1) + 2*U(i-1,j) +F2(i-1,j+1));
Gy= (U(i-1,j+1) + 2*U(i,j+1) +F2(i+1,j+1)) - (U(i-1,j-1) + 2*U(i,j-1) +F2(i+1,j-1));
uSobel(i,j) =sqrt(Gx^2 +Gy^2);
end
end
根据边缘检测绘制的图像即可简易的确定模糊角度。
2 图像复原
2.1 维纳滤波法
由上述提出的G(u,v)=H(u,v)F(u,v)+N(x,y)函数可知,在忽略噪声因素N的时候,对函数逆向运算反卷积运算即可得到近似的原图。
(8)
但是由上式可以看出,在噪声不能被忽略并且H较小时,噪声会被放大,并且由于H存在零点,在这些点处的图像无法被恢复。从数学上来说,统计误差函数最小时精度最高,统计误差可表示如下:
(9)
则通过化简可以得到:
(10)
从公式中可以看出维纳滤波法引入了Sp(u,v)/Sf(u,v)噪信功率比这项。当噪声为0时维纳滤波与逆向滤波等价,当噪声较大时,通过信噪比抑制复原中对噪声的放大。
由上述证明过程可以看出,维纳滤波法的关键在于反卷积运算。Matlab中自带的deconvwnr函数即部分代码为:
wnr1 = deconvwnr(blurred, PSF2, 0);
subplot(2,3,1),imshow(wnr1);
title('修复图像');
其中,PSF函数即为点扩散函数,Blurred为模糊图像。Matlab中PSF函数有3个参数,分别为模糊类型、模糊尺度和模糊角度。第一个为’motion’类型,即为运动模糊。而后两者的数值就需要根据上文所说的方法进行测定。
2.2 最优窗法优化图像边界
这样在复原的过程中,边缘像素的运算会受到权重的影响,防止了因为像素缺失导致的灰度跳跃。但具体矩阵中的权值大小仍有待探索。
2.3 灰度均衡优化
对于含噪声的图片可以先使用灰度均衡法对图片先行处理。这种改进方法的基本思想是使含有噪点的图片的灰度均匀分布,防止在进行反卷积运算时扩大噪声。
现用r,s表示原始图像和变换后图像的灰度值。0表示为黑,1表示为白。设变换函数为s=T(r)且T(r)有以下特点:
(1)在0 (2)在0 由概率论可知,若图像灰度值的概率密度函数Pr(r)和T(r)已知,则变换后的概率密度函数为: (11) 由均衡化的定义可知Ps(s)=1,则积分后可得: (12) 此公式只针对连续灰度的图像。对于离散灰度的图像处理相似。 Matlab中提供了histeq函数进行灰度均衡。但是该函数是针对离散灰度图像的,对于连续灰度的图像处理后视觉上会出现色阶的跳跃。根据上文的转换函数和histeq函数编写了一个新的适用于连续函数的灰度均衡函数,matlab代码如下: NumPixel=zeros(1,256); fori= 1:height forj= 1:width NumPixel(I(i,j) + 1) =NumPixel(I(i,j) + 1) + 1; end end ProbPixel=zeros(1,256); fori= 1:256 ProbPixel(i) =NumPixel(i) / (height*width* 1.0); end CumuPixel=zeros(1,256); fori= 1:256 ifi== 1 CumuPixel(i) =ProbPixel(i); else CumuPixel(i) =CumuPixel(i- 1) +ProbPixel(i); end end CumuPixel=uint8(255 .*CumuPixel+ 0.5); fori= 1:height forj= 1:width I(i,j) =CumuPixel(I(i,j)); end end 实验效果如图1所示。 由前文的讨论可知,模糊尺度与模糊角度确定后即可较大程度地复原模糊图像。在图2中利用matlab对一副运动模糊图像的模拟复原。使用前文方法得到原图模糊尺度约为103px,模糊角度为1.5。 本文建立了针对图像的模糊过程的模型和复原过程的模型,也针对图像复原算法的不足进行了优化处理。实验表明,图像复原主要围绕在参数确认和复原滤波两方面。对于参数确认研究希望能找到一种更加精确确认模糊角度的算法,对于复原滤波方面希望能得出更加智能的算法,能自动检测到模糊区域。
2.4 算法效果
3 结束语
