海量信息融合方法及其在故障诊断中的应用
2018-10-29原琦丁家满
原琦 丁家满

摘要:针对多传感器融合的信息不确定性以及证据理论缺乏对海量信息融合的有效处理,以概率盒理论为基础,提出一种基于改进的证据理论概率盒融合算法,用于解决故障诊断中的应用问题。首先将多个传感器数据进行分布类型检验,然后针对不同分布特点使用不同方案进行建模,并利用改进的证据理论概率盒融合算法进行数据融合,最后从融合后的结果中提取特征,利用支持向量机进行故障诊断,得出诊断结果。实验结果表明,该方法合理可行,尤其在海量信息融合中,效率得到显著提升。
关键词:故障诊断;概率盒;信息融合;多传感器;支持向量机
DOIDOI:10.11907/rjdk.173304
中图分类号:TP319
文献标识码:A 文章编号:1672-7800(2018)008-0174-04
英文摘要Abstract:Aiming at the information uncertainty of multi-sensor fusion and evidence theory's ineffective treatment of mass information fusion,this paper proposes an improved probability theory box fusion algorithm based on evidence theory to solve the problem of fault diagnosis problem.First,the data of multiple sensors were tested for distribution type.Then different schemes were used to model different distribution characteristics.Thirdly,the improved evidence theory probability box fusion algorithm is used for data fusion.Finally,the feature is extracted from the fusion results,and the SVM is used to diagnose the fault,and the diagnosis results are obtained.The experimental results show that the method is reasonable and feasible,especially in the massive information fusion,the efficiency is significantly improved.
英文關键词Key Words:fault diagnosis; probability box; information fusion; multi-sensor; SVM
0 引言
故障诊断是指运用已有检测方法发现系统和设备故障的过程,对避免设备的意外失效、延长部件使用寿命具有重要意义。由于以往的单传感器信号采集系统在传感器失效时无法正常采集信号,可靠性和容错性较低,因而现今指标为减少数据集缺失,多由多源传感器采集。与单一传感器系统相比,在故障诊断等方面采用多源信息融合技术能够增强数据可信度,并有效提高诊断精度。此外,多传感器的信息融合可以为诊断提供更丰富的信息,全面反映监控对象状态,在传感器失效时,正常工作的传感器可作为冗余备份采集有效的故障信息。因此,为了得到更好的预测结果,必须对数据进行融合处理。常用的融合算法有神经网络[1-3]、贝叶斯[4]、DS证据理论[5-7]等。其中,文献[8]、文献[9]虽然为海量信息融合技术的发展提供了新的探索途径,但在融合海量信息时,证据理论具有潜在指数级复杂度的缺点会更加突出,同时参与海量信息融合的各传感数据变量都存在不确定性[10],即便符合某种分布,也很可能存在波动情况。
本文将概率盒理论[11]引入到信息融合中,提出基于改进的证据理论概率盒融合算法,并采用支持向量机[12-14]进行故障诊断,以有效解决海量信息融合在故障诊断中的应用问题。
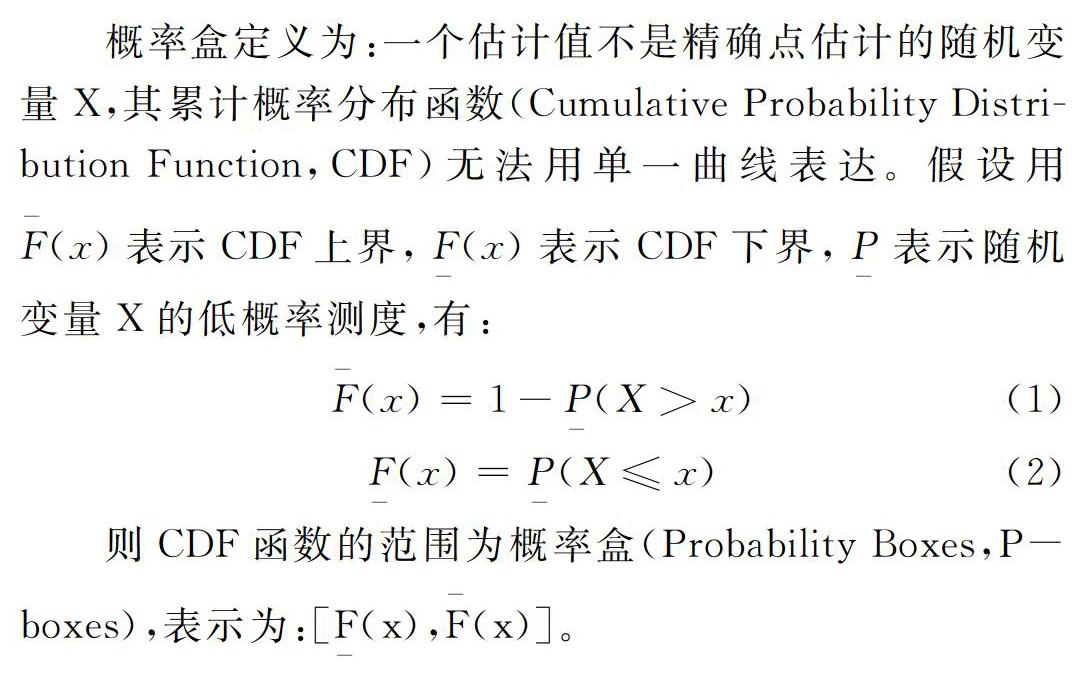
1 概率盒及DS结构体
2 概率盒融合算法
2.1 概率盒建模
为了在有限信息量的前提下达到最优,需将不确定数限制在概率盒内,从而实现概率盒的建模。
本文采用3种建模方法[15],分别为原始参数概率盒建模方法(The P-boxes Modeling Method Based on Original Parameters,OPPMM)、特征参数概率盒建模方法(The P-boxes Modeling Method Based on Characteristic Parameters,CPPMM)、概率盒定义建模方法(The P-boxes Modeling Method Based onDefinition,DPMM)。
具体建模过程为:当采集到的原始数据服从某种概率分布类型时,采用基于原始参数概率分布类型的OPPMM;当原始数据不符合某种概率分布类型时,对其进行特征提取,进而判断所提取的特征信息是否满足某种概率分布类型,若满足则采用特征参数概率盒建模方法CPPMM,否则采用概率盒直接建模方法DPMM。
2.2 改进的概率盒融合算法
传统的DS证据理论合成规则适用于数值相互独立的情况,然而对于存在矛盾的数据问题,DS证据理论合成规则处理方式为丢弃冲突的证据。常见的用加权平均作融合的算法仅适用于不同情况下的不同数值,即数据无法确定具有随机性的情况。针对上述问题,依据概率盒自身对不确定性处理的优势,基于概率盒的合成规则与现有DS规则合成算法,提出基于改进DS合成规则的概率盒融合算法,并利用MATLAB代码对该算法加以实现,有效解决了传统算法无法处理矛盾数据的弊端。
本文算法的主要思想是利用传统DS规则和加权平均融合算法的优势,结合概率盒在处理不确定问题上的优越性,将二者结合从而构成新的融合算法。首先对采集到的原始数据进行概率盒建模,构建多个概率盒;其次将概率盒标准离散成多份DS结构体,进而判断离散后的结构体是否存在数据冲突。若存在冲突数据,不存在交集部分,则使用加权平均的融合算法处理数据;若不存在矛盾数据,则使用DS合成规则的融合算法处理数据。算法流程如图1所示。
通过上述示例可以看出,针对不同数据源的信息融合,采用本文提出的基于改进DS合成规则的概率盒融合算法可以有效处理矛盾数据融合问题,因而改进后的融合算法适用于多种数据情况,适用范围更广。
2.3 概率盒特征提取
2.4 基于概率盒的故障诊断
在提取出数据特征向量后,采用支持向量机方法对特征向量进行故障分类。SVM故障分类过程如下:①对提取出的概率盒特征量建立训练数据和测试数据;②对SVM进行参数设定;③对数据集进行归一化处理,并将训练数据作为SVM的输入,得出训练模型;④输入测试数据,得到最终分类结果。
3 实验结果与分析
本文使用的振动信号由NSFI / UCR智能维护系统中心(IMS-www.imscenter.net)生成,4个轴承安装在轴上,旋转速度经由摩擦带耦合到轴的AC马达保持恒定为2 000RPM,通过弹簧机构将6 000磅的径向载荷施加到轴和轴承上。本实验选取数据集1中的轴承3作为实验测试数据,实验数据由正常轴承和内圈故障分别采集X轴和Y轴情况下各400 000条数据构成。
根据上述3种建模方法,对正常轴承和内圈故障分别进行概率盒建模如图3所示。
根据得到的概率盒建模,进一步采用改进后的概率盒融合算法进行融合,对正常轴承与内圈故障分别进行X轴和Y轴两个方向的融合,其结果如图4所示。
将融合后的概率盒进行特征提取,本实验选取累积宽度、对数累积宽度和矛盾区间作为特征。将原始数据中每1 000条数据作为一组,共400组,每组分别提取概率盒特征,其中2/3用于测试,剩余1/3用于识别。故障类型分为故障和非故障,分别由-1和+1表示;再将提取出的特征向量随机分为训练数据和测试数据,将训练数据输入SVM生成训练模型;接着输入测试数据进行诊断,得出最终诊断结果。
按照上述步骤进行多次故障诊断测试,最终得到基于概率盒融合的平均诊断精度。在样本容量一致的条件下进行对比实验,实验一使用未经融合的单一传感器数据进行概率盒建模并提取特征向量,再利用SVM进行識别;
实验二使用未经改进的DS证据理论融合算法对数据进行融合并提取特征向量,再利用SVM进行识别。此外,与采用LAD方法[16]进行的故障诊断结果进行对比,对比结果如表1所示。
由表1可知,在样本数量和分类方法相同的情况下,本文方法的诊断精度远高于未改进的DS证据理论,并且可以看出,在单个传感器存在失效的情况下,其诊断精度有所降低,而本文方法有效解决了这一问题,提升了诊断精度,具有较好的容错性。
随着样本数量的增加,将其分为6个数据集,分别为40万、60万、70万、80万、90万、102万条样本数量。用上述方法分别对不同数据集进行故障诊断,诊断时间消耗对比如图5所示。
实验结果显示,随着样本数增加,DS证据理论的诊断时间呈指数增长,未融合的单一传感器和LAD方法诊断时间呈线性增长。本文方法的诊断时间在数据量小于80万条时,诊断时间呈线性增长,但当数据量大于80万条时,诊断时间逐渐趋于平稳,并且在同一数据集下,本文方法的诊断时间均明显少于其它方法。主要由于本文方法在融合过程中将建成概率盒后的参数信息作为整体运算,而非像证据理论一样对逐个单元单独计算,从而大幅减少了时间消耗。
4 结语
本文在故障诊断中采取一种基于概率盒理论的融合
算法,有效利用概率盒处理不确定性问题的优势,防止了特征提取时的信息丢失现象。实验结果表明,本文方法有效可行,在保障故障诊断结果精确性的同时,大幅减少了时间消耗,是一种合理、高效的海量信息融合新方法。
参考文献:
[1] 廖薇,许春冬,刘锦高.基于神经网络的模拟电路故障诊断研究[J].微电子学与计算机,2010,27(5):125-128.
[2] 黄如科,梁天生,余汉华.基于小波变换与BP神经网络的模拟电路故障诊断[J].电子科技,2014,27(8):46.
[3] 徐小力,刘秀丽,蒋章雷,等.基于主观贝叶斯推理的多传感器分布式故障检测融合方法[J].机械工程学报,2015(7):91-98.
[4] 张池平,张英俊,苏小红,等.一种基于神经网络和证据理论的信息融合算法[J].计算机工程与应用,2006,42(1):174-176.
[5] 陆三兰,程铭东.基于D-S证据理论的组合数据融合算法[J].微电子学与计算机,2011,28(1):95-98.
[6] 罗志增,叶明.用证据理论实现相关信息的融合[J].电子与信息学报,2001,23(10):970-974.
[7] 汤宝平,邓兵,邓蕾,等.无线传感器网络多级融合的机械故障诊断方法[J].振动、测试与诊断,2016(1):92-96.
[8] 邵景峰,贺兴时,王进富,等.大数据环境下的纺织制造执行系统设计[J].机械工程学报,2015,51(5):160-170.
[9] 李嘉菲,周斌,刘大有,等.海量信息融合方法及其在状态评价中的应用[J].软件学报,2014(9):2026-2036.
[10] CHEN J,LI Y,YE F.Uncertain information fusion for gearbox fault diagnosis based on BP neural network and DS evidence theory[C].Intelligent Control and Automation.IEEE,2016:1372-1376.
[11] FERSON S, KREINOVICH V,GINZBURG L,et al.Constructing probability boxes and dempster-shafer structures[R].Sandia Report,2003.
[12] 王健,何卫平,王伟,等.基于D-S证据理论的产品多信息融合标识失效补救方法[J].计算机集成制造系统,2015,21(4):1142-1149.
[13] 向阳辉,张干清,庞佑霞.结合SVM和改进证据理论的多信息融合故障诊断[J].振动与冲击,2015,34(13):71-77.
[14] 梅检民,赵慧敏,肖云魁,等.基于多分类支持向量机和D-S证据理论的轴承故障诊断[J].汽车工程,2015(1):114-119.
[15] 杜奕,丁家满,刘力强.基于概率盒理论的滚动轴承故障信号建模方法[J].振动与冲击,2016,35(19):31-37.
[16] LAKIS A,YACOUT S,MORTADA M.Diagnosis of rotor bearings using logical analysis of data[J].Journal of Quality in Maintenance Engineering,2011,17(4):371-397.
(责任编辑:黄 健)
