基于磁偏角误差指纹库的室内组合定位*
2018-10-26尚俊娜施浒立岳克强
刘 参, 尚俊娜, 程 涛, 施浒立, 岳克强
(1.杭州电子科技大学 通信工程学院,浙江 杭州 310018;2.中国科学院国家天文台,北京 100012;3.杭州电子科技大学 电子信息学院,浙江 杭州 310018)
0 引 言
磁罗盘作为一种常用的磁强度矢量偏角测量工具,具有体积小、功耗低、成本低等优点,且每次测量角度值相对独立,不会产生累积误差[1,2],但地球磁场较弱,环境中磁场干扰较多,影响测量精度,如在室内、工厂等环境周围金属或者建筑墙壁内的钢筋结构都会对地磁场产生较大干扰,这时就需要对航向误差做校正处理。文献[3]介绍了一种依靠三轴磁强计和加速度传感器校正磁罗盘误差的方法,利用已知位置处的测量值校正磁罗盘误差模型,可进一步改善磁罗盘的精度,但该方法需要较多的辅助数据集且算法复杂度较高;文献[4]介绍了一种利用反向传播(back propagation,BP)神经网络建立磁罗盘的误差模型,采用自适应算法训练神经网络的各个权系数,但该模型收敛速度慢,无法进行实时定位;文献[5]提出一种基于遗传算法通过交叉、变异和选择等过程对误差参数进行优化,但该方法的补偿精度较低,无法满足高精度室内定位需求。
还有一些学者[6~11]从多元导航角度出发,提出了综合使用多种导航方式的组合导航系统来进行误差的相互校正。由于地磁具有相对稳定性,即地球磁场在地磁干扰严重地带,只要干扰源恒定则形成的被干扰的磁场也是相对稳定的。故可以在被测量区域建立一个磁偏角指纹库,通过差分的方法消除航位角偏差。
本文提出了一种采用广义延拓逼近法建立一个连续的磁偏角指纹库,本文算法实验均来自于真实的环境,实验数据表明该模型具有较高的拟合精度,可将航向角平均精度从±8°补偿到±0.2°以内,消除了累积误差效应。在室内组合定位应用中,本文采用的磁罗盘辅助的锚节点测距定位方式,平均定位精度小于1 m,故可实现亚米级精度的定位功能。
1 室内磁罗盘误差指纹库数据处理
1.1 磁罗盘误差指纹库数据采样
室内环境中干扰在空间分布上没有规律性,很难通过一种数学模型来估算不同地理位置处磁偏角的大小,但因为室内布局,建筑结构等一般不会有变动从而产生的干扰也比较恒定。本文通过用电子磁罗盘对室内外环境下的磁偏角进行采样,测试采用搭载HMC5843磁传感器芯片的电子磁罗盘,测试环境选择中科院国家天文台地下车库。
具体测试步骤如下:
1)选择测试区域,并将测试区域按网格划分,确定采样点位置,如图1所示。其中含有“*”为采样点位置;
2)将磁罗盘依次放在图1中“*”处,磁罗盘方向指向坐标系同一个方向,每个点采集30组测试数据;
3)对每个点采集的30组数据进行滤波处理,得到罗盘在每个点的测量值与该处真实方向的误差值;
4)用广义延拓逼近法处理离散采样值,得到一个可覆盖整个采样区域的连续的误差函数。

图1 车库平面图及采样点分布
1.2 广义延拓逼近法处理采样值
在指纹的采集过程中,采集点越多,分布越密越能反映出实际环境中测量参量的变化趋势,但工作量也越大且采集过程中不可能遍历所有数据点,一般采取网格划分的方法测量划分节点的数据,然后利用插值或者拟合的方法来建立整个指纹库。广义延拓逼近法吸取插值法与拟合法的特性,将两者有机结合起来,不仅保证了分片最佳逼近,而且保证了曲面在整域的变化趋势和分片间的光滑连续。
广义延拓逼近法的基本思路是:将整个定义域进行剖分,化整为零,分别寻找各个子域的逼近函数,然后再拼接起来对整个定义域进行逼近[12]。为使单元域上的逼近函数与周围单元域上的逼近函数既连续又光滑,广义延拓逼近方法将每个子单元域适当向周围邻近单元作部分延伸,形成延拓域。这样能充分利用单元外的信息,使单元内的逼近函数能充分吸收邻近单元的信息,从而保证单元域上逼近函数能与邻近单元逼近函数相协调。


(1)
式中t为逼近函数得的项数,gi为Ωe上的一组基函数,ai为待定系数。对延拓域Ω′的逼近函数实行在单元域Ωe的边界点上符合插值条件,而在其他点作最小二乘拟合处理,即可得单元域内的逼近函数的待定系数。

在室内环境下,广义延拓逼近法处理前后的磁罗盘角度误差数据如图2所示。

图2 室内环境磁罗盘误差曲面
可以看出,室内环境下,磁场受干扰严重,且没有规律,不同位置处磁罗盘角度波动较大,最大可达30°。
本文同时在室外空旷环境下进行了同样的测试,进行室内外对比,室外环境如图3所示,实验结果如图4所示。

图3 室外测试场景

图4 室外环境磁罗盘误差曲面
通过图2、图4可以看出,磁场在室外空旷环境下分布较均匀,角度偏差小于10°。但在室内环境下,地磁场受外界磁场源干扰较大,磁场分布很不均匀,在使用磁罗盘测量运动物体的航向角时,角度值具有较大偏差,且不同位置处偏差的分布具有不确定性,难以找到一个有效的分布规律,此时误差补偿就显得尤为重要。
2 基于误差指纹库磁偏角误差补偿与室内组合定位应用
2.1 地磁偏角误差补偿试验
通过广义延拓逼近处理,形成了一个磁罗盘角度误差关于测量区域的一个函数,只要知道磁罗盘在测量区域内的位置坐标,就可以通过调用指纹库中的误差函数与当前测量值进行差分,从而大大提高磁罗盘的测量精度。
在车库中沿一条直线路径以1 m/s的速度匀速行走,并用磁罗盘实时输出角度数据,输出频率10 Hz,所选路径如图5中直线箭头所示。测试角度曲线如图6所示。

图5 测试路径

图6 测试角度曲线
表1给出了本文所述方法处理前后所测磁罗盘航向角误差值,可知,处理前航向角平均偏差接近8°,经过误差补偿以后的平均偏差小于0.2°,因此本文方法可以滤除磁场受干扰所引起的误差,使处理后的角度值更加接近理论值。

表1 处理前后误差值比较 (°)
分别用本文所述方法处理前后的角度数据作航位推算[13],导航轨迹如图7所示,其中“”曲线为利用原始测量角度直接进行航位推算得到的轨迹,“-”曲线为利用本文所采用的误差修正后的角度进行航位推算得到的轨迹。

图7 本文方法处理前后角度航位推算轨迹
由图7可以看出经过本文所述方法处理后的角度值更加接近真实航向角,在连续推算时可以采用误差补偿以后的角度进行航位推算,相比于采用原始测量角,消除了累积误差效应,大大提高了航位推算的精度。
2.2 室内组合定位中的应用
在基于磁罗盘辅助的室内组合导航定位应用中,航向角的准确测量十分重要,直接决定了组合定位的定位精度,而磁罗盘在室内环境下受干扰严重,测量误差较大[14~18]。在组合定位时,本文首先由导航灯定位一个初始位置,然后根据定位坐标调用磁偏角误差模型库进行角度差分校正,并根据当前航向角外推出下一点位置,最后对下一时刻的定位点和外推点进行加权组合作为最终定位点。图8为在中科院国家天文台地下车库的导航定位测试结果并与最大似然估计[19]定位比较,其中:标记“o”为四个导航灯位置点。

图8 室内组合定位轨迹
图9统计了本文采用算法与最大似然定位算法[19]在测试车库中的定位误差累积分布曲线,统计不同定位精度的概率分布可知,本文采用算法在1,2,3,4 m内的定位精度置信概率分别为65.5 %,96.5 %,97.6 %和99.2 %,高出最大似然定位算法58.2 %,71.1 %,49.3 %和39.0 %,且本文算法的平均定位精度是0.82 m,定位误差有96.5 %的概率在2 m以内。最大似然估计定位方算法的平均定位精度(3.71 m)大于3 m,而本文提出的组合定位方法的平均定位精度小于1 m。故采用本文所述方法,可大大提高了室内组合定位的精度。
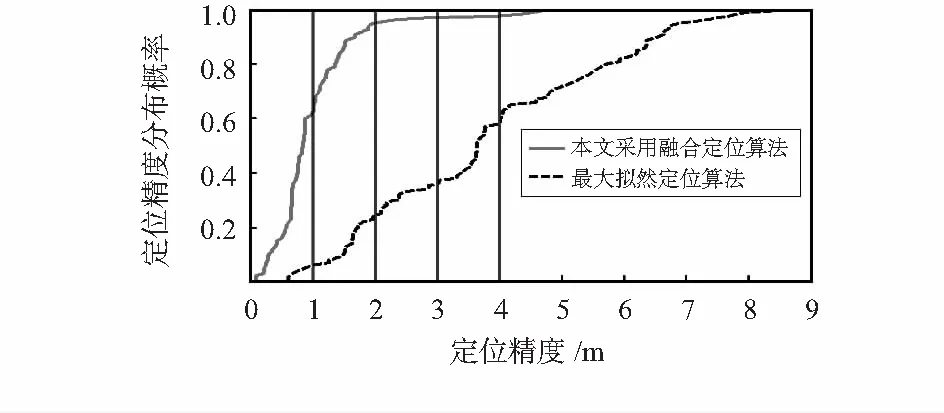
图9 不同算法的定位精度累积分布
3 结 论
本文分析了地磁干扰造成磁航向角测量偏差的问题,介绍了运用广义延拓逼近法建立磁偏角误差指纹库的应用,本文算法实验均来自于真实的环境,实验数据表明本文所述磁罗盘误差补偿方法能有效对航向角进行误差补偿,可将航向角的平均精度从 8°补偿到 0.2°以内,消除了累积误差效应,故此本文所提出的误差补偿方法可以滤除磁场受干扰所引起的误差,使处理后的角度值更加接近理论值。在室内组合定位应用中,本文采用的磁罗盘辅助的锚节点测距定位方式,本文采用算法的平均定位精度是0.82 m,定位误差有96.5 %的概率在2 m以内,而最大似然估计定位的平均定位精度大于3 m。故通过实验证明本文方法可进一步提高了室内组合定位的精度。