新一代励磁调节器平台的研制及应用
2018-10-24周华良朱宏超杨志宏
吕 齐, 周华良, 朱宏超, 姜 雷, 杨志宏, 张 吉
(1. 哥伦比亚大学工程与应用科学学院, New York 10027, 美国; 2. 南瑞集团(国网电力科学研究院)有限公司, 江苏省南京市 211106; 3. 国电南瑞科技股份有限公司, 江苏省南京市 211106; 4. 智能电网保护和运行控制国家重点实验室, 江苏省南京市 211106)
0 引言
励磁调节器作为发电机组的核心控制系统,是保障机组及电网安全运行的关键要素,也是保障系统稳定运行最经济、最优先采用的手段[1-3]。随着电网互联程度提高以及快速励磁广泛应用,电网低频振荡问题愈加突出,频率0.2 Hz左右甚至更低的低频振荡时有发生,已成为影响电网安全、稳定、经济运行的最重要因素之一。传统励磁调节器使用IEEE 421.5规定的2B型电力系统稳定器(PSS)(简称为PSS2B)在这种频段的抑制效果并不理想,需要在励磁系统中配置更宽工作频率的新型PSS。
另外,励磁调节器从传统发电领域扩展到多种应用场合[4-5],如大型调相机、磁控电抗器,这些应用对励磁调节器提出了新的要求。新一代调相机对励磁系统的响应速度、强励能力等要求远高于常规励磁[6],其中电压响应时间小于40 ms、顶值电压倍数不小于3.5、顶值电流倍数不小于2.5;磁控式高抗要求励磁系统增加光纤实时通信能力[7-8]。随着《智能水电厂公共信息模型技术规范》等标准的发布以及电厂智能化改造的加速,励磁系统还需要具备符合IEC 61850-9-2标准的数字化采样功能[9-10]。
以往发电机组对励磁调节器的网源协调性能要求不高,但随着电网规模扩大,励磁调节器控制环节的网源协调性问题日益突出[11],国内外多次大停电事故分析表明,若并网机组励磁系统、电网保护等设备配置不合理,会引起保护误动跳闸,导致事故停电范围扩大,因此,解决此问题对于电网的安全可靠运行具有重要意义。
本文针对励磁调节器发展面临的现实需求,从灵活通用的角度出发,提出了能够满足励磁控制多种应用场合的励磁调节器平台技术方案,在设计及实现的各个环节充分考虑了励磁应用的可靠性和电磁环境适应性,构建了全新的励磁调节器应用平台,此平台对励磁调节器的设计开发提供丰富的组件和统一的接口,使得励磁调节器能够在平台上灵活快速地实现系统构建与功能扩展。该平台兼容模拟或数字采样,具备多种通信方式以及智能诊断等功能,通过平台共性模块和共性技术的灵活组合与配置,快速实现了励磁系统在核电站、抽水蓄能电站、磁控电抗器、大型调相机等工程上的稳定应用。
1 励磁控制新需求分析
根据当前发展要求,新一代励磁调节器应具备低频振荡抑制、主辅环协调控制、无功支撑、多场景支撑、智能诊断等多种功能。
1.1 低频振荡抑制
PSS是提高电力系统动态稳定性最经济的重要措施之一。为解决原动机增加有功时无功反调的问题,目前励磁调节器普遍采用双输入PSS2B。然而随着电网规模的扩大,导致低频振荡频率低至0.1 Hz左右[12],PSS2B在这种低频段表现为明显的弱阻尼甚至负阻尼,对低频振荡的抑制作用有限。
1.2 主辅环协调控制
以往励磁控制系统的研究更多关注的是励磁系统主环的特性,当电网或者发电机组发生故障时一般都伴随着各种限制环节的作用,此时控制性能不再由主环决定,而取决于辅环,所以在电网或者发电机组发生故障时励磁控制未必能够达到预定的效果[13]。只有发挥辅环的控制性能才能够提高励磁系统在电网或者发电机组发生故障情况下的调节性能,进一步提升励磁系统可靠性,提高电网稳定性。
1.3 无功支撑
普通发电机的励磁控制策略仅支持电压闭环,输出的无功功率随系统电压而变化,而在同步调相机应用条件下,需要在正常稳态运行时就将无功功率控制在某一设定值附近,以提高暂态情况下调相机的无功出力裕量,最大限度发挥调相机对交流电压的支撑作用[14]。
1.4 多场景支撑
随着智能电网和特高压输电的发展,励磁调节器的应用场合从传统发电机拓展到了同步调相机、智能化电站、磁控式高抗等新领域,这对励磁调节器的适应性提出了新要求。例如,对于智能化电站,励磁调节器须具备数字化接口及IEC 61850通信能力;对于磁控式高抗,励磁系统的电流给定值由上位机下发,因此励磁调节器需要具备满足IEC 60044-8标准的双向光纤通信能力等。多样化的应用需求要求新一代励磁调节器平台具备非常灵活的硬件扩展能力、模块化的软件架构以及高效的开发环境。
1.5 智能诊断
智能诊断功能实现励磁调节器运行状态的实时监测,对于励磁调节器的运行维护具有重要作用。以往励磁调节器缺少录波、事件记录、时间管理等功能,状态监测手段欠缺,对励磁系统运行状态的诊断不够完善。
2 平台技术方案
新一代励磁调节器平台自下而上基于硬件平台、软件平台、应用平台三级层次结构构建,如图1所示。硬件平台包括电源模块、开入模块、管理模块、采样模块、同步脉冲模块、开出模块,其中管理模块完成平台管理功能,采样模块完成同步采样、计算、控制以及分布式通信功能。软件平台包括模拟/数字采样模块、数据交互模块、统一编程接口模块、通信模块、录波模块、监控模块、人机界面模块、事件记录模块、时间管理模块、调试接口模块。
以硬件、软件平台为基础,面向应用构建同步采样模块、闭环控制模块、冗余控制模块、脉冲触发模块、智能诊断模块等,可实现应用功能的灵活部署。
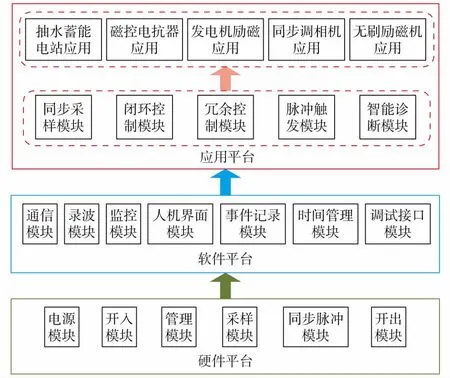
图1 新一代励磁调节器平台技术方案Fig.1 Technology scheme of new excitation regulator platform
2.1 新型多频段电力系统稳定器
本方案实现并优化了新型电力系统稳定器(称为PSS4B)模型,依据幅相频非线性拟合方程,提出了一种以相位补偿兼顾增益为目标,跟踪误差最小化的优化方法,计算各频段PSS4B的参数,确保在存在0.2 Hz以下振荡模式的电网中,励磁系统能够提供有效的正阻尼。图2是电网振荡频率为0.14 Hz条件下的抑制效果图。由图2可见,通过配置模型与参数,PSS4B不但能够在较高频段提供比PSS2B更强的正阻尼,而且在较低频段仍然能够提供足够的正阻尼,并且与无PSS相比,对0.2 Hz以下的低频振荡的抑制效果提高了3~5倍。
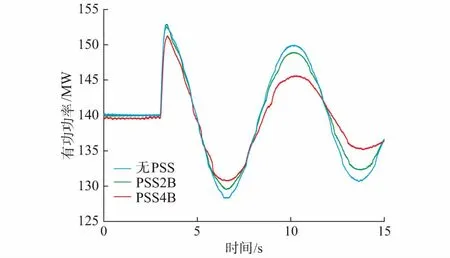
图2 f=0.14 Hz条件下的振荡抑制效果Fig.2 Oscillation suppression effect with f=0.14 Hz
2.2 主辅环协调控制
受原动机驱动极限、发电机制造工艺及系统动态稳定的制约,发电机正常运行时必须对定子电流进行限制。本设计开发了定子电流限制器,动作的时间特性符合GB/T 7064—2017《隐极同步发电机技术要求》;无功功率进入死区时,能维持励磁调节器的控制稳定;并且动作时不屏蔽PSS等其他辅环的作用。
本文设计采用国际电工委员会的反时限模型,实现了电压/频率(V/Hz)反时限模型、过励限制(over excitation limiters,OEL)模型和定子电流限制(stater current limiters,SCL)反时限模型,既能满足最新国标要求,又能实现与保护特性良好配合。
本文设计中欠励限制器(under excitation limiters,UEL)实现了自适应变参数控制,与固定参数控制相比,无功功率恢复到限制值的调节时间由4.5 s缩短到1.5 s,电机的功角摆动幅度减小4°左右,电机的功角稳定裕量显著增加。
本设计实现了PSS与低励限制的协调控制,当系统电压突然升高时,励磁系统既能快速地限制电机的进相深度,避免保护误动跳机,又能提供正阻尼,有效地抑制有功功率的低频振荡。
2.3 调相机控制策略
设计采用大时间常数的比例—积分—微分(PID)控制配合主环快速PID控制,将两种控制分别在两个不同的频域实现,避免了稳态无功闭环控制对暂态电压变化的影响,调相机励磁系统主环控制模型如图3所示。
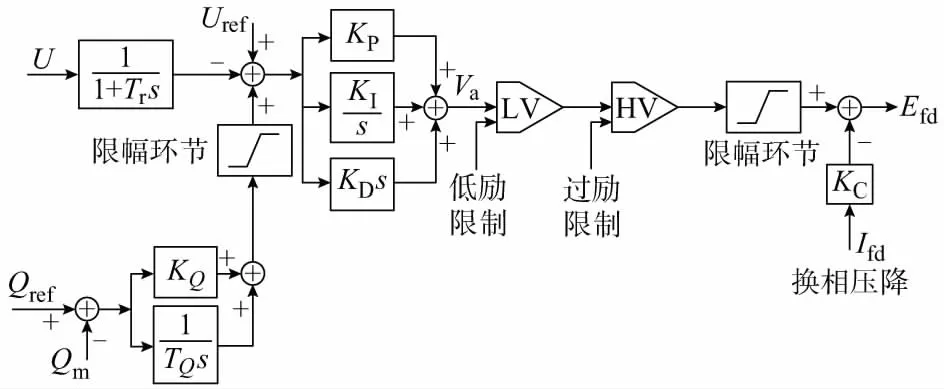
图3 调相机励磁系统主环控制模型Fig.3 Chief loop control model of compensator excitation system
图中KP,KI,KD分别为电压主环控制PID参数;KQ和TQ为稳态无功控制环PI参数;Uref为机端电压参考值;U为机端电压测量值;Tr为测量环节时间常数;Qref为稳态无功环无功功率参考值;Qm为无功功率测量值;Ifd为励磁电流;KC为换相系数;Efd为输出励磁电压。本设计通过合理设置稳态无功环时间常数TQ实现稳态控制和暂态控制之间的协调。稳态时由无功闭环发挥主导作用;暂态时由电压闭环实现快速强励磁或强减磁。该控制策略简单可靠。
2.4 多场景支撑方案
为适应各种应用场合,本励磁调节器平台在硬件、软件、应用三级架构上均设计了相应的功能模块与接口。针对普通应用场合,在传统设计基础上增加了支持全球定位系统/北斗卫星导航系统的对时模块、录波模块、事件记录模块;针对数字化应用场合设计了适用于模拟或数字采样的模块、制造报文规范(MMS)通信模块、面向通用对象变电站事件(GOOSE)通信模块;针对调相机应用场合设计了具有无功支撑能力的闭环控制模块;针对磁控电抗器应用场合设计了具备光纤通信接口的模块。工程实施时只需投入相应的功能模块即可满足应用需求。
3 关键功能模块设计
3.1 同步采样模块
同步采样模块基本原理如图4所示。
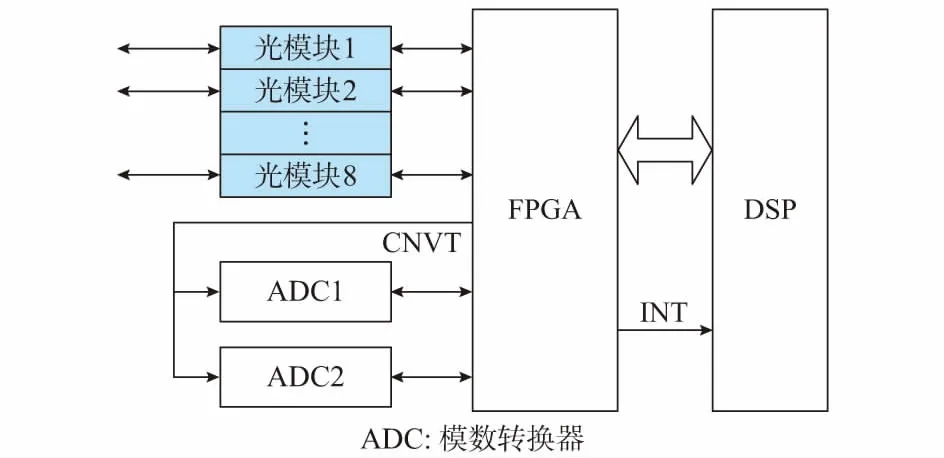
图4 同步采样模块Fig.4 Synchronous sample module
同步采样模块同时支持本地集中式双AD采样和分布式数字化采样两种方式,本地AD采样基于高速串行外设接口(SPI)实现[15],数字化采样接口物理介质采用光纤,通信协议采用IEC 60044-8或IEC 61850-9-2标准[16]。本地采样和数字化采样通过采样控制信号(CNVT)进行同步,本地ADC在CNVT信号触发下启动,同时现场可编程门阵列(FPGA)通过光模块向采集子单元发送采样控制报文,采集子单元在收到采样控制报文后完成采样,并在固定时刻发回采样值报文。FPGA收到所有采样值后,通过硬中断信号(INT)触发数字信号处理器(DSP),DSP从FPGA读取采样值进行控制计算。
3.2 双机冗余控制模块
双机实现冗余热备用是保证励磁调节器系统可靠性的关键功能之一,其设计原则是:以两套励磁调节器的状态为依据,避免不必要的切换;杜绝双套为从,避免双套为主。为保证切换的可靠性与快速性,采用独立的FPGA芯片实现通道切换逻辑。每套励磁调节器均输出本套为主及本套故障两个开出量,同时接收他套为主及他套故障两个开入量。以当前A套为主运行,切换至B套的过程为例,如图5所示,双机切换流程如下。
当励磁调节器收到手动切换命令或发生故障时,触发双套切换逻辑。此时,若B套正常,则将B套置主;若B套故障,则维持A套为主,不进行切换。为确保励磁系统在切换过程中不失控,只有确保B套为主之后,A套才被置为从。
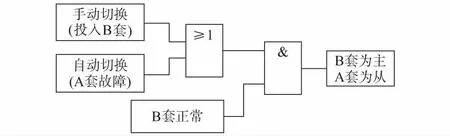
图5 励磁调节器双机切换原理图Fig.5 Schematic of excitation regulator for double-machine switching
为实现“无扰切换”,维持切换过程中励磁电压、励磁电流的稳定,两套励磁调节器之间还通过高速总线实时交互切换信息。
3.3 闭环控制模块
励磁调节器闭环控制模块原理见附录A图A1。当电网或者发电机组发生故障时,各种限制环节随之发挥作用,励磁系统的控制性能不再简单地由主环决定,而是取决于辅环和主环的协调配合。通过提升辅环控制性能,该励磁调节器显著提升了励磁系统在电网或者发电机组发生故障时的调节性能,提高了励磁系统的可靠性。该励磁调节器实现了UEL自适应变参数控制,电机的功角稳定裕量显著增加,实现了PSS与低励限制的协调控制。
3.4 脉冲触发模块
脉冲触发模块由脉冲计算模块、脉冲发生模块、功率放大模块、脉冲回读模块、脉冲比较模块组成。脉冲计算模块输出脉冲产生时刻,脉冲发生模块根据此时刻,在检测同步电压过零点的基础上经过精确延时后输出脉冲,功率放大模块将弱电脉冲信号转换成适合驱动晶闸管的标准脉冲信号,脉冲回读模块将晶闸管驱动信号采集后输出到脉冲比较模块,用于确认触发脉冲的正确性。
脉冲比较模块的原理是:以同步电压为基准,实时检测回读的脉冲相位及数量与原始脉冲是否一致,进而判断脉冲是否存在错误。若脉冲存在异常,可精确定位至某一相,并在人机界面给出告警信号。
3.5 智能诊断模块
励磁系统及设备的运行状态监测对提升励磁调节器的稳定性和可维护性具有重要作用,因此,本励磁调节器充分利用自有采样回路及传感器对电源电压、采样基准、核心模块温度、光功率等信息进行采集,同时对CPU负荷进行了实时统计,并对以上状态量进行合理性判断,输出报警或闭锁信息。
同时励磁调节器在运行中实时监测机端电压、同步电压的频率、相位、相序,若偏差超出允许范围,可定位至某一相,并在人机界面给出告警信号。
本励磁调节器内置1 GB大容量存储器,可脱离工控机独立存储100组波形,在开机、停机、故障、限制、试验等工况下可自动录波。基于专用波形查看工具,可以快速分析波形的阶跃上升时间、振荡次数、调节时间、阻尼比等关键参数,为试验与故障分析提供依据。
4 可靠性设计
4.1 采样防误设计
为防止励磁采样回路及数据出现异常,系统主要考虑采取以下设计:①双AD相互比较,基准源监视;②AD采样数据传输增加循环冗余校验(CRC)功能;③基于采样控制信号对FPGA内部SPI接口进行同步复位;④混合采样值传输增加和校验功能。
4.2 脉冲触发防误设计
为保证触发角度的正确性,避免处理器模块内部数据总线异常导致的失控,励磁调节器主DSP将触发角度数据写入FPGA后,必须经过回读校验无误后才确认生效。若回读的角度与写入值不一致,则丢弃本次角度,沿用之前的触发角度。回读角度若连续多次错误,主设备输出触发角度写入故障告警,启动双套切换流程,保证运行的可靠性。
4.3 同步信号回路防误设计
可靠的同步信号是励磁调节器准确发出触发脉冲的基础。励磁调节器采用了二阶主动式巴特沃斯滤波器,可以有效地滤除励磁变副边电压中的高次谐波,消除换相缺口,准确捕捉同步信号过零点,确保触发脉冲的准确性。
4.4 全面的电压互感器断线判据设计
发电机机端电压互感器(TV)断线是电厂常见故障之一,同时TV断线也是误强励发生的主要诱因之一。本系统励磁调节器从以下三方面进行设计,保证正确应对TV断线。
1)单套TV断线:加快主备机切换,在1.6 ms内完成主备平稳切换,避免机端电压上冲过高甚至跳机,保证切换过程中控制的可靠性。
2)增添负序电压、电压电流相关性等判据,可以准确判断单TV单相、多相断线;双TV单相、多相断线等故障模式。
3)通过综合定子电流条件,正确区分机端三相短路与双TV三相断线引起的电压突降。
4.5 转子电流冗余判断设计
为了提高转子电流的采样可靠性,本励磁调节器同时采集两路直流转子电流进行冗余判断。在软件处理方面采用以下策略。首先,判断输入直流电流分流计信号的有效性,如果超出合理范围,则输出相应的通道故障并告警;其次,励磁调节器通过采集机端电压、有功功率、无功功率等信息,计算得到转子电流的理论参考值。若实际采集的通道间差别过大,则使用与理论值接近的通道值;最后,若两路信号均与理论值差别过大,则告警,退出与转子电流相关的限制功能,如最小励磁电流限制、最大励磁电流限制、过励限制等。
4.6 节点防粘连功能设计
当远方离散控制系统(DCS)或者自动电压控制(AVC)系统的增减磁继电器发生节点粘连时,励磁调节器不应持续增磁或减磁。在空载、负载工况下,励磁调节器可针对电压、电流给定值分别设置单次增减最大变化量、增减步长、增减间隔时间、给定最大值、给定最小值等参数,从而兼顾空载试验对增减磁速度的要求以及负载工况下对增减磁精度的要求;通过灵活设置不同工况下的增减磁速率,励磁调节器与AVC增减磁脉宽实现了良好配合。
5 实验验证及应用
2017年4月21日,三峡水电站左岸8号发电机组采用NES-6100励磁调节器完成了励磁系统国产化改造,顺利通过各项试验,成功并网发电。由附录A图A4看出,发电机甩负荷过程中,定子电压超调量约为5%额定值,未发生振荡,此技术指标优于行业标准中电压超调量不大于15%额定值,振荡次数不超过3次,调节时间不超过5 s的规定[17-18]。
由附录A图A5看出,发电机定子电压上升时间0.23 s,调节时间0.83 s,未发生振荡。此技术指标优于行业标准中电压上升时间不大于0.5 s,振荡次数不超过3次,调节时间不超过5 s的规定[14-15]。
新一代励磁调节器NES-6100 2013年在葛洲坝电厂成功投运。截至2017年9月,已经在田湾核电站、三峡水电站、仙居抽水蓄能电站、鸳鸯湖火力电厂等数百台机组投入运行。目前所有设备运行正常,应用效果良好。此外,该励磁调节器平台已在安哥拉磁控电抗器及扎鲁特换流站调相机等项目上获得了应用,取得了良好的效果。
6 结语
针对励磁调节器在工程应用中的新问题,本文总结了励磁调节器在低频振荡抑制、主辅环协调控制等方面的需求,研制了新一代励磁调节器平台。该平台能够灵活适应调相机励磁、抽水蓄能机组励磁、磁控电抗器励磁等多种应用场景,在三峡水电站、扎鲁特换流站调相机等大型工程中得到了应用。平台系统能够通过改变软、硬件配置,扩展到电力电子领域等其他应用场合。该平台在智能诊断、图形化编程等方面的功能仍需继续完善。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx)。