钻具自动排放机械臂设计中的静力学分析
2018-10-23刘劲苍范岳柏
刘劲苍,范岳柏
(湖南省地勘局探矿机械研制中心,长沙 410100)
0 引言
传统钻具排放系统需要工人直接接触钻杆,操作的危险性大,容易造成安全事故,且工作效率较低。为了改善这一问题,钻具自动排放机械臂系统应运而生。目前,国外在这一领域的研究已具有较长的历史,但是我国的进展仍较为迟缓[1,2]。基于这个背景,本文结合当前自动排放机械臂的发展趋势,对其中的静力学问题进行分析与计算,为驱动系统的设计及制造提供理论基础。
1 钻具自动排放机械臂的计算参数
在对一个系统进行静力学的分析时,需要根据系统正常工作时所能出现的最大载荷作为静力学计算的数据。参照陆地钻机的尺寸标准,钻具自动排放系统能够操纵的钻铤是最大载荷,一般以长度为9.45 m,外径为254 mm,质量为3420.9 kg的钻铤参数进行计算。本文将型号为NC70-100的钻铤作为载荷参考对象,对钻具自动排放机械臂系统进行静力学分析,钻铤尺寸参数等见表1。

表1 NC70-100钻铤参数
2 钻具自动排放机械臂设计中的静力学计算
2.1 机械手的分类及选取
手部驱动装置(又称为抓取机构)、手指结构以及传动机构的设计依据是液压机械手夹持工件时预紧力的大小。为了保证机械手始终保持夹紧的工作状态,机械手夹持立根所产生的夹紧力应该抵消掉钻杆自重产生的静载荷和立根在运动状态下产生的动载荷,如立根运动时产生的惯性力或惯性力距。在这个过程中,由于排放系统的操作臂运行速度较小,其加速度导致的惯性力距和惯性力不予考虑。
工程上常根据抓持工件的工作原理对机械手进行分类,主要包括夹持以及吸附两大分类,本文所讨论的机械手是夹持式。夹持类的手部结构分为手指回转型和平移型两种。平移型手指主要依靠手指的平行移动完成夹持动作,适用于平板材料和矩形材料的夹持。平移型手指具有夹持不同半径的圆棒材料不会导致中心偏移的优点,但是其结构较为复杂、尺寸较大,加工精度要求较高。回转型手指完成夹持动作主要依靠指根的回转运动,根据枢轴支点数的不同,分为单支点回转型和双支点回转型。这种类型的手指具有结构简单、外型小巧的优点,但是对于不同的工件会造成一定程度的定位偏差[3]。
本文设计的钻具自动排放机械臂所抓取的立根为圆柱形,直径66.04~254.00 mm,在立根盒内排放钻杆立根时,两立根之间的间距较小,因此系统本身在水平方向上应尽量占最少的空间,才能顺利地抓持住立根。此外,由于对立根在机械手内的位置精确度没有较高的要求,采用全自动化的系统既可以对立根进行修正,也能够完成自动锁紧和松扣的动作。结合不同类型机械手的优缺点,本系统最终选择双支点回转型夹持式机械手,并根据运行稳定性的要求,驱动方式选择为液压驱动。
2.2 上机械臂的静力计算
将液压缸2提升使其液压杆为回缩状态,分析此时的上机械臂所受的静力,计算出平移液压缸1工作时的压力。图1为上机械臂的受力简图,其中夹紧式机械手结构用EFGH代指,连杆BE和y轴之间的夹角为α,其取值范围为20°~55°,A、B、C为连接处。
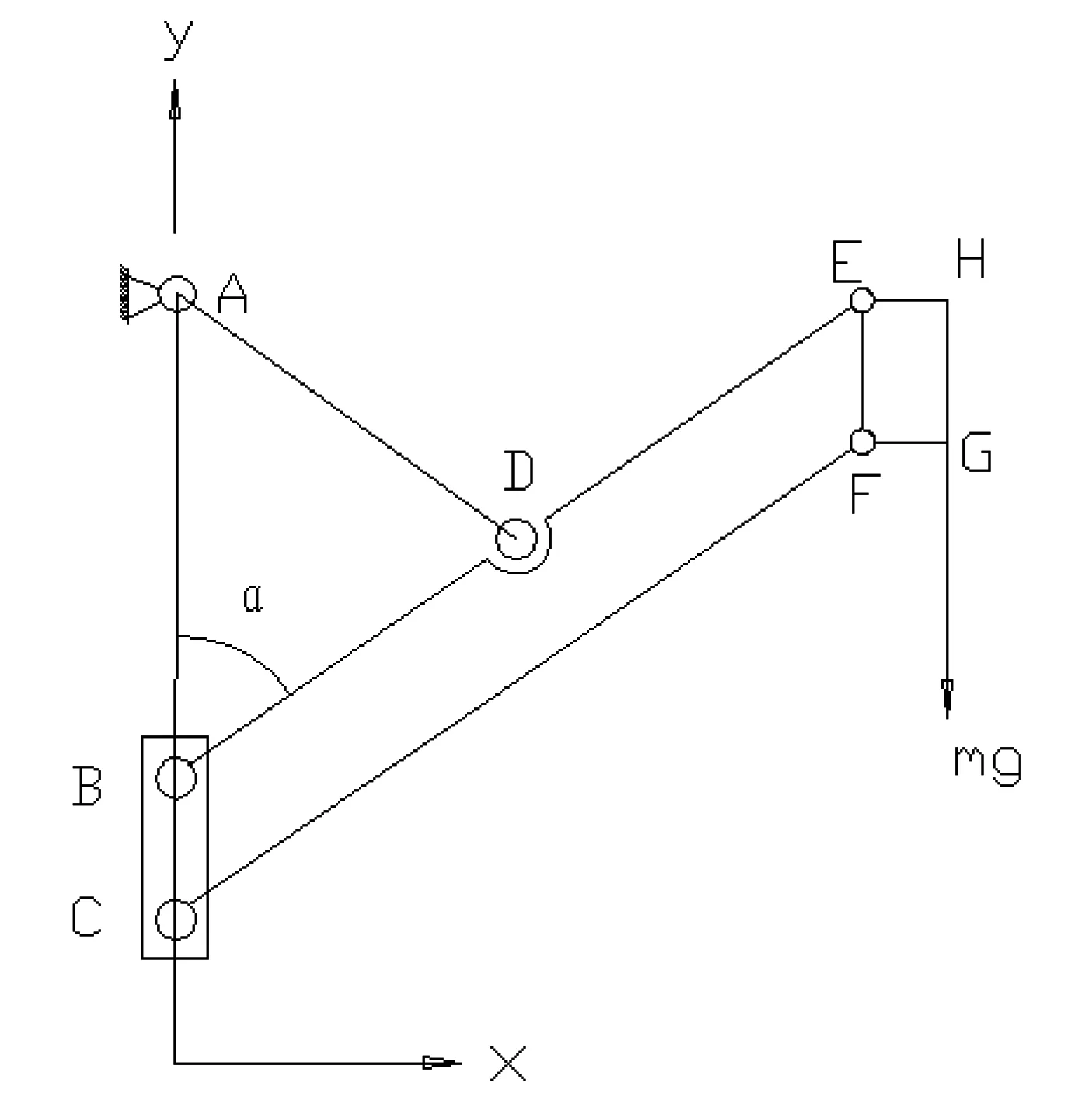
图1 上机械臂受力简图
计算所用到的参数数值分别为:lAB=lBD-lDE=0.5lCF=1819 mm,lEF=869 mm,lBE=lCF=3638 mm,lEH=601.8 mm。
图2为EFGH机构的受力图,建立E点的力矩平衡公式,即:
ME=FFClEFsinα-mglEH=0
(1)
(2)
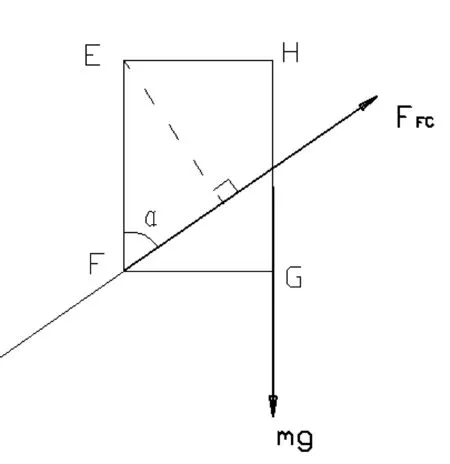
图2 E点受力分析图
EFGH机构的受力分析图如图3所示,BE、CF连杆在机械手上的作用力分别用FE、FFC表示,θ为FE和y轴的夹角,α为FFC和mg的夹角,得出FE计算见公式(3):
(3)
根据力的平衡原理,得出下列公式:
FFCsinα=FEsinθ
(4)
mg=FFCcosα+FEcosθ
(5)
根据公式(4)、(5),得出θ的计算公式:
(6)
(7)
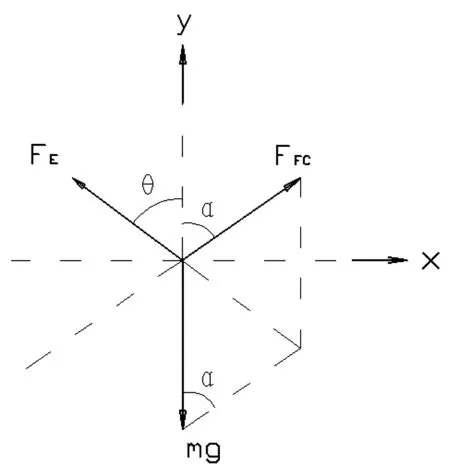
图3 EFGH机构受力分析图
B点的受力分析图如图4所示,建立B点的平衡方程,即:
(8)
对式(8)求解,可得:
(9)
图5、图6分别为连杆BE和下支架的受力简图,根据力平衡的原理得出液压缸作用在下支架上的力Fy,即:
(10)
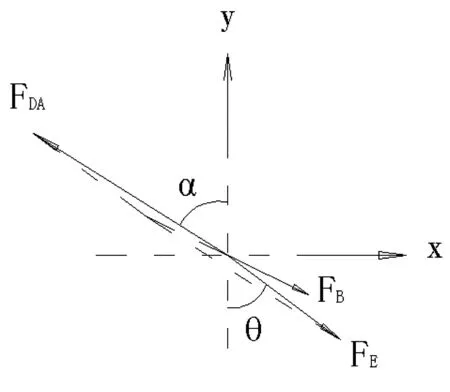
图5 BE连杆的受力分析图
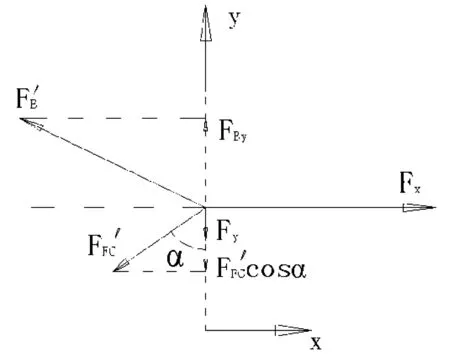
图6 下支架的受力分析图
根据以上公式可求得Fy的值,且能够得出Fy与α的曲线关系,如图7所示。根据曲线图可知,当α为55°时,Fy最大为184 972.3 N。

图7 FA和α的曲线关系图
进一步研究提升液压缸的工作压力时,连杆AD的受力情况见图8。
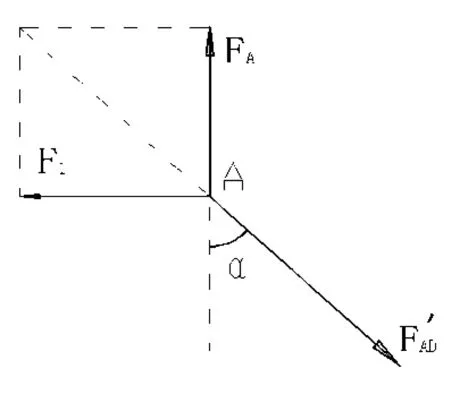
图8 AD连杆的受力图
根据力平衡关系可以得出,提升液压缸时对AD连杆的作用力FA,见公式(11):
(11)
其中,α的范围为20°~55°,通过以上公式能够求得FA值,且能够得出FA与α的曲线关系,如图9所示。根据曲线图可知,当α=20°时,FA最大为393 931.9 N。
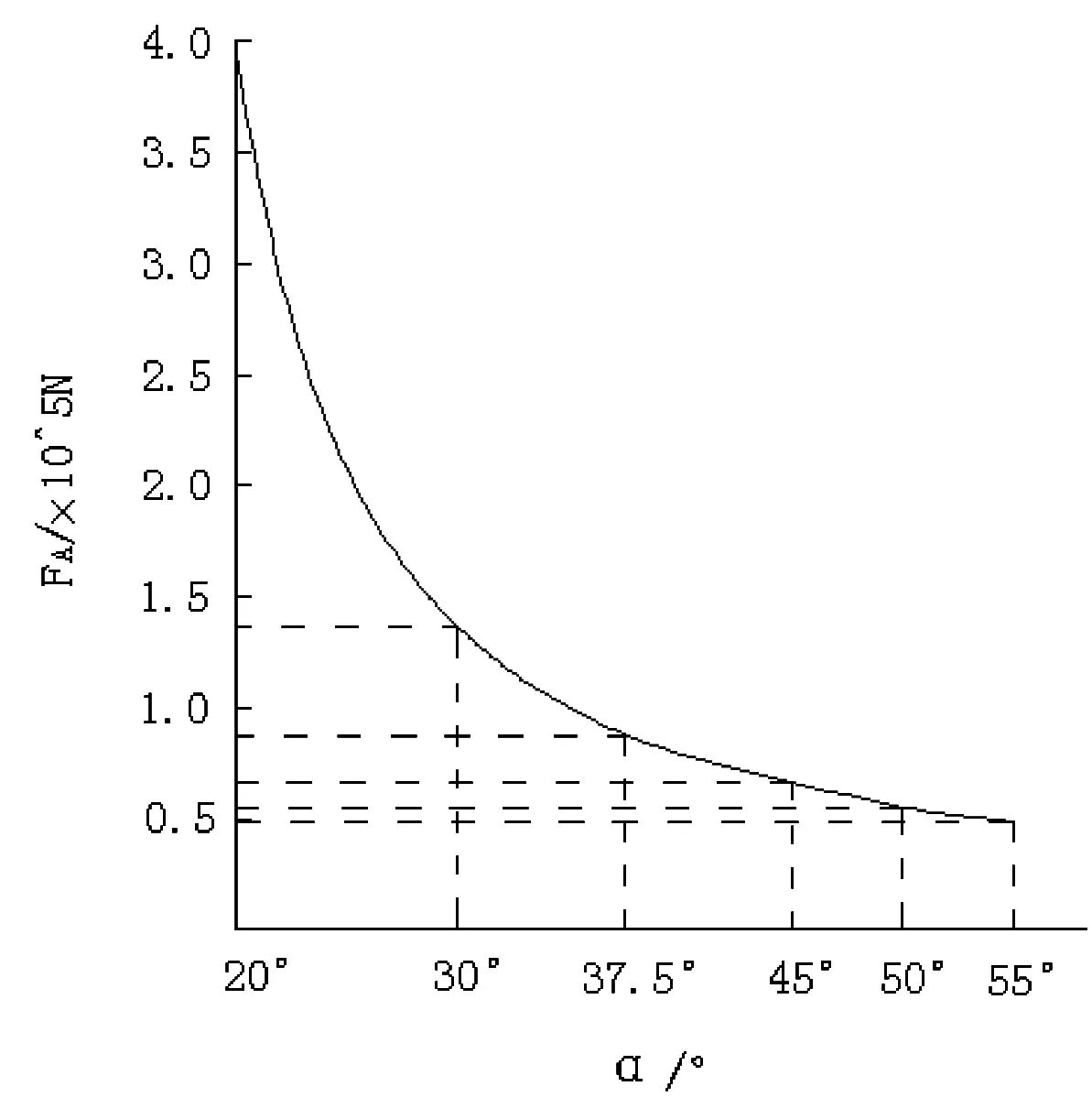
图9 FA和α的曲线关系
3 结论
本文以夹持NC70-100钻铤为例,对钻具自动排放机械臂所涉及的静力学问题进行分析,计算出各个力的方程式解,得出了上机械臂的工作压力,并绘出机械臂的工作压力曲线,为钻具自动排放机械臂的设计提供了理论基础。