某履带车辆分布式电涡流辅助制动研究
2018-10-23史浩楠王天祺孙国伟
史浩楠, 董 政, 王天祺, 孙国伟
(1.陆军装甲兵学院, 北京 100072; 2.中国人民解放军63853部队, 吉林 白城 137000;3.中国人民解放军72690部队, 山东 泰安 271000)
引言
履带式车辆具有高机动性的要求,即实现车辆快速有效的行、停、转的高机动性能,其中“停”即是制动系统所发挥的作用。分布式联合制动在履带车辆上是一个新的技术,对于提高履带车辆制动性能,减小主动轮制动力矩等方面有着巨大作用。与传统履带车辆制动方式相比,采用分布式电涡流联合制动主要有以下几点优势[1-3]:第一,延长制动器寿命。分布式制动可以使制动力分散于各负重轮,减小机械制动器的制动力矩,并减少机械制动部件的发热,延长其使用寿命。第二,制动性能好。分布式联合制动采用电涡流制动器对负重轮进行辅助制动,与传统的制动相比,制动力矩大大增加,极大程度上提升了制动性能。第三,节约能源。电涡流制动可作为发电机,不仅提供制动力矩,还可以回收部分能量,提高能量利用率。
1 车辆动力学分析
1.1 车辆制动受力分析
履带车辆水平制动力学方程为[4]:
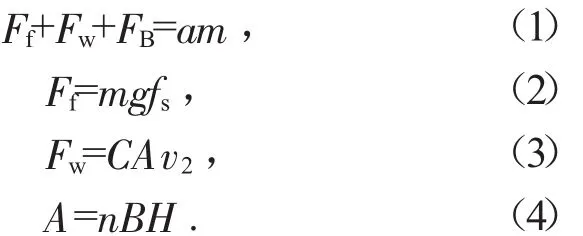
式中:Ff为滚动阻力;FB为制动力(电气机械制动合力);Fw为空气阻力(可忽略);fs为滚动摩擦系数;C为空气阻力系数,取0.59~0.74;A为车辆迎风面积;B为履带中心距,取2.8 m;H为车高,取2.44 m;修正系数n为0.8~0.9;v为车辆速度;坚硬路面滚动阻力系数,fs=0.03~0.05;g为重力加速度。FB为地面提供制动力的反作用力,其数值上限为:

式中:ψ为地面的附着系数,数值与地面属性、履带结构以及两者之间的滑移程度有关,如不考虑滑移程度,就钢制履带来说,对于沙地,其附着系数一般为0.6~0.7之间,水泥地面为0.7~0.8之间,黏土地面约为0.4左右[5],本文选取地面为水泥地面,其附着系数为0.7。
周所长说:“这几天我们对进站检查很严,特别是对大宗的行李都要开箱检查,可能凶手一看形势不对,又拖着这么大一个箱子不方便,只好先寄存了再说,后来凶手又肯定是被别的什么事给耽误了,以至于没有时间回来再处理尸体。”
1.2 参数选择
履带车辆全重m=52 077 kg,车高H=2.44 m,履带中心距B=2.8 m,修正系数n=0.8,履带着地长L=4.6 m,主动轮半径R1=0.318 m,负重轮半径为0.69~0.71 m,取 0.7 m,空气阻力系数 C 为 0.59~0.74,取0.6,水泥地面滚动阻力系数f为0.03~0.05,取0.04,由此得最大车速时风阻为:

利用f(u)以及m文件所提供参数求得温度对转矩的影响值。建立温度与转速对转矩的综合制动力矩模型,如图6所示。

表1 缓速器主要参数
2 联合仿真模型建立
2.1 动力学模型建立
2.1.1 履带建模
履带车辆的行动部分主要有推进装置和悬挂装置两部分所组成,其推进装置包括2个主动轮、12个负重轮、6个拖带轮、2个诱导轮以及156块履带板。采用双轮缘负重轮、双销式履带的结构设置。每侧履带前部设一个主动轮,将仿真时的力矩施加于主动轮之上,通过主动轮传递给履带,而履带与地面直接接触,与地面产生摩擦力用于牵引或制动。参考实际车辆主动轮构造,完成履带部分建模[6-7],如图1所示。
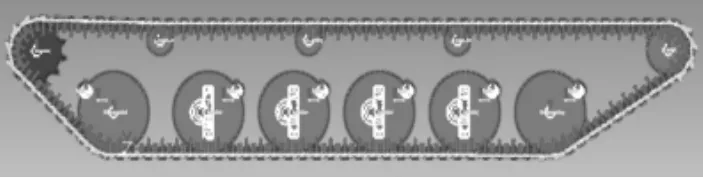
图1 履带部分模型
2.1.2 车体建模
以某履带车辆尺寸为参考,使用基于SolidWorks软件的三维实体建模功能,对车辆进行建模,并转换为相应的格式导入RecuDyn中。建模时将车体模型与履带模型连接得到,履带车辆动力学模型如图2所示。
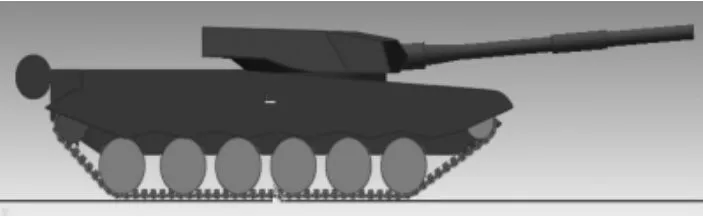
图2 履带车辆动力学模型
2.1.3 路面建模
利用f函数建立温度与扭矩的关系模型,其参数如图5所示。
对于履带装甲车辆来说,路面的抗剪切和承压能力是影响履带所承受制动力矩的关键性因素。因此,在对履带装甲车辆的制动性能进行研究时,一个合适的路面力学模型的构建对仿真研究的成功与否具有至关重要的作用。
本文仿真分析采用坚实路面,其参数如表2所示。
3)不考虑电涡流缓速器自身体积,以及实际安装问题。
路面模型如图3所示。

表2 地面主要参数

图3 路面模型
2.2 MATLAB模型建立
1)履带车辆多体动力学模型车体的质量均匀分布,中心位于车体几何中心。

纯负重轮电涡流制动,由于电涡流制动规律影响,当车速逐步减小时,所提供的减速度也越来越小,仿真结果如图9所示。
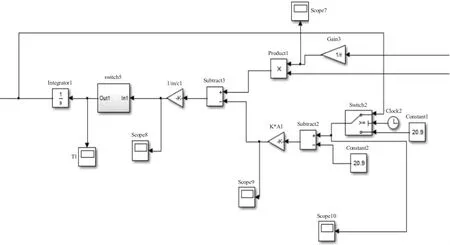
图4 温度模型
常规组:常规开腹切除术32例,均行胃楔形切除术,包括胃底11例,胃体10例,小弯侧7例,胃窦7例。标本冷冻保存以备病理检查。
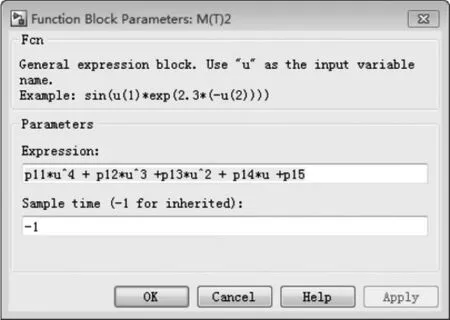
图5 f(u)参数
建模仿真以某型电涡流缓速器实验数据为参考,其主要技术规格如表1所示。
教师作为先进文化的传播者和学生的领路人,不仅要具有坚定的政治信念,崇高的责任感,高尚的师德,还必须掌握新时代最新教育教学手段。在新媒体与思想政治教育融合的大背景下,教师要主动学习新媒体技术,提高自身的媒介素养,提升新媒体使用技能,通过各种新媒体平台,倾听学生心声,了解学生的诉求、困惑和疑问,并利用QQ、微信、微博等加强师生之间的互动交流,提高思想政治教育的针对性、时代性和实效性。政府相关部门和高校要重视对高校思想政治教育工作者的网络技能培训工作,通过面对面集中培训、网络培训等多样化培训方式,提高他们的网络运用能力和水平。
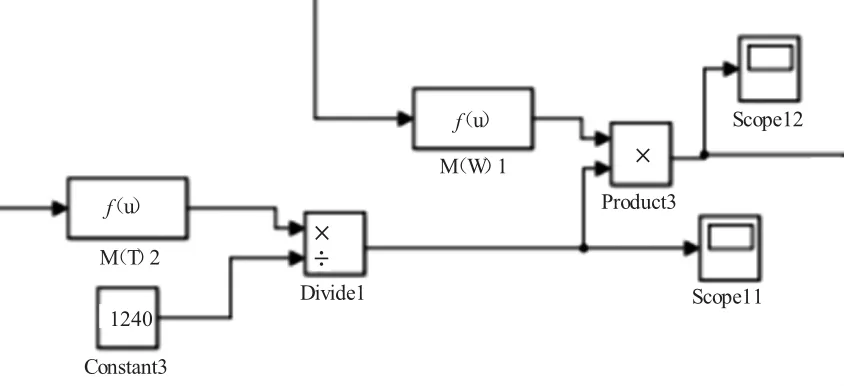
图6 温度与转速对转矩的综合制动力矩模型
2.3 联合仿真模型建立
将在动力学软件RecurDyn建立的车辆动力学系统模型以及采用Matlab软件进行建立的电涡流缓速器模型的基础上,运用RecurDyn和Matlab软件接口技术,进一步构建分布式电涡流制动联合仿真模型,形成联合仿真模型如下页图7所示。
3 仿真实验与分析
3.1 仿真环境分析
联合仿真建立的假设前提:
在测绘领域,随着无人机的普及,获取航摄资料比以往更容易。然而传统的数字航空摄影测量方法无法适应无人机高效生产的需要,主要原因在于:空三加密环节自动化程度低,需要大量人工干预;在采集环节需要频繁地切换像对,并由此产生大量接边问题。因此,使用更高效的三维建模软件,并以此为核心重新设计作业流程,可以克服以上弊端,提高生产效率。为此,本文以1∶2 000地形图的生产为例,介绍基于Smart 3D三维建模软件的无人机航测地形图的生产过程,并对成果精度进行了验证。

图7 联合仿真模型
通过查阅资料可知,某电流缓速器制动转矩主要与车速及温度有关,4档时最大制动力矩大约为1 240 N·m,平均制动力矩为1 000 N·m。电涡流制动器的热力学特性通式为:
2)在坚硬路面上行驶,不考虑履带与软地面之间的相对摩擦。
为了验证所提出算法的有效性,截取部分送往雷达终端显示的280 s共28帧雷达图像,经过多帧积累得到如图2所示的目标回波积累图像。
3.2 纯机械制动仿真实验分析
设定车辆初速度为85 km/h,采用纯机械方式制动,使车辆停车,仿真结果如图8所示。

图8 纯机械制动车辆速度
式(7)中:mi为缓速器转子盘质量;ci为缓速器质量热容;Ki为缓速器传热系数;Ai为缓速器有效散热面积;θi缓速器温度;θ∞为汽车环境温度;F缓速器制动力;v为车辆行驶速度,利用其外特性曲线拟合多项,建立f(u)函数,利用负重轮转速求得电涡流制动器制动力。通过反馈的力矩以及转速求解瞬时温度的模型,如图4所示。
对分布式电涡流辅助制动进行仿真分析,仿真结果如图10、11、12所示。其中图10为分布式电涡流制动图,图11为车辆减速度,图12为电涡流制动力。
由仿真结果可知,采用分布式电涡流辅助制动方式其制动时间为5 s,比纯机械制动时间减少2.5 s,当车速较大,车辆紧急制动时,电涡流制动器能够提供较大制动力,车辆制动过程中偏驶量较小,符合设计要求,评估了分布式电涡流制动的可行性。
4 结论
基于Matlab与RecurDyn软件,建立了履带车辆的多体动力学模型以及电涡流simulink控制模型,对履带车辆自然停车、主动轮单独制动、分布式电涡流辅助制动等各种工况进行仿真。
2017年,数字报纸广告运营收入依然在下滑,而“两微一端”的运营则大大填补广告收入缺口。报业机构建立了全媒体矩阵,大大增强了其传播影响力,突破了传统报纸广告宣传的局限性,在广告市场中重新获得了竞争优势。
1)通过对履带车辆竖直方向震动情况、偏驶情况、制动距离、制动加速度等指标的分析,验证了履带车辆制动模型的正确性、可靠性。
2.5 两组手术前后CSI及BSI比较 术前,两组CSI及BSI比较,差异无统计学意义(P>0.05);术后,两组CSI及BSI均下降,组间比较差异无统计学意义(P>0.05)。见表5。
(5)结合某大跨径连续刚构桥实例,对结构温度分布确定方式应用进行了简要说明,最后得出沿箱梁高度方向分布的温度和以上十分接近,但和现行规范要求有很大差异;沿桥梁长度方向分布的实际温度大致相同的结论。
2)通过对各制动工况仿真分析,得到分布式电涡流辅助制动方式制动时间较传统制动方式减少约为2.5 s,达到了仿真目的,评估了履带车辆分布式制动性能,为进一步研究履带车辆车辆分布式电涡流辅助制动及实车实验奠定了理论基础。
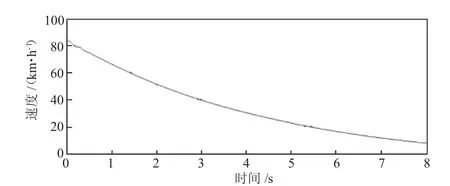
图9 纯负重轮电涡流制动仿真图
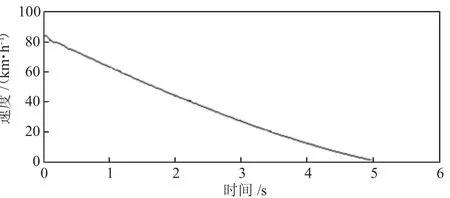
图10 分布式电涡流制动车辆速度

图11 车辆制动加速度

图12 电涡流制动力