基于Arduino平台的仿水母机器人设计
2018-10-23李志刚陈志澜崔秀芳高振帮
陈 绪 ,李志刚 ,陈志澜 ,2,崔秀芳 ,高振帮
(1.上海海洋大学 工程学院,上海 201306;2.上海建桥学院 机电学院,上海 201306)
无人水下探索系统伴随着人类探索海洋、开发海洋逐渐加快的步伐得到了较快的发展,其中以鱼类等水生生物为推进系统仿生原型的机器正受到越来越多的关注。相比于传统的波状游动鱼类,水母具备较高的运动灵活性、环境适应性和目标隐蔽性,同时还具有高效的流场能量利用机制,适合作为海洋深潜、洋流观测、目标侦查以及武器运载等水下机器人的仿生原型。
目前,仿水母机器人的研究主要集中于基于智能材料的仿生水母,其中尤以形状记忆合金SMA(shape memory alloy)的应用研究较多[1-3],但其成本较高,推广应用受到限制。在推进方式上,文献[4]采用筒形行波超声电机驱动水母的6个并联多关节手臂上摆或下扬来实现水中的仿生推进,但这种驱动方式效率过慢,而且前进方向不容易控制;文献[5]通过推拉式电磁铁和弹性橡胶膜组成的推进模块,模仿水母伞状体喷水推进的原理对水母机器人进行驱动,该模块过于复杂,在能量的运用效率方面不如纯机械驱动。在仿水母机器人控制系统方面,文献[6]采用ARMCortex-M4单片机来控制仿水母机器人的各项运动控制,但是该系统在很多硬件和编程软件上不如Arduino平台方便,且各硬件的兼容性与Arduino平台相比有所欠缺。在此,提出了采用Arduino平台进行控制的仿生水母,其成本低、机械结构简单;还设计了一系列模块,对仿水母机器人各项功能进行完善。
1 水母推进机制的研究
水下生物经过自然界的淘汰与选择,己经进化出能够适应自身结构特点的游动方式。因此,分析与模仿水下生物的运动方式,将是研制水下机器人的重要方向之一。
水下生物常见的运动方式主要有:
1)身体波动式又称鳗行式 其游动方式如正弦波形的前进一样,将身体当作推进器,利用从头部到尾部的身体波动来游动,其前进单位距离所需的推力最小。
2)BCF推进式又称尾鳍摆动式 该游动方式的显著特点是主要利用鱼的身体后半段和尾鳍的协调摆动来产生推进力。
3)MPF推进式 这种推进模式主要是利用除了尾鳍之外的一些鱼鳍划动来向前推进,大多数的鱼类只是通过这些鳍来保持平衡和控制转向.
4)喷射推进模式 依靠自身躯干的组织结构,通过身体内部的特殊部位向后挤压水流而产生后向推力,从而利用动量守恒定理使身体向前推进。
水母是一种无脊椎动物,全身没有支撑性的硬骨骼,身体呈辐射对称状。现己发现的水母有200多种,可分为水螅纲和钵水母纲,最为常见的就是体钵水母纲。水母的解剖结构如图1所示,水母将海水从壳口吸入后喷出,产生间歇式的推进力而运动[7]。
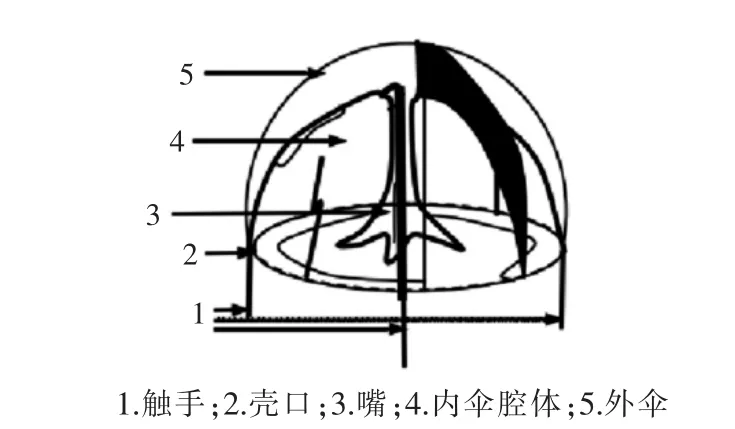
图1 水母解剖结构Fig.1 Anatomic structure of jellyfish
2 仿水母机器人结构设计
文中所设计的仿水母机器人结构主要由上腔室、下腔室、驱动结构及喷射结构所组成,如图2所示。
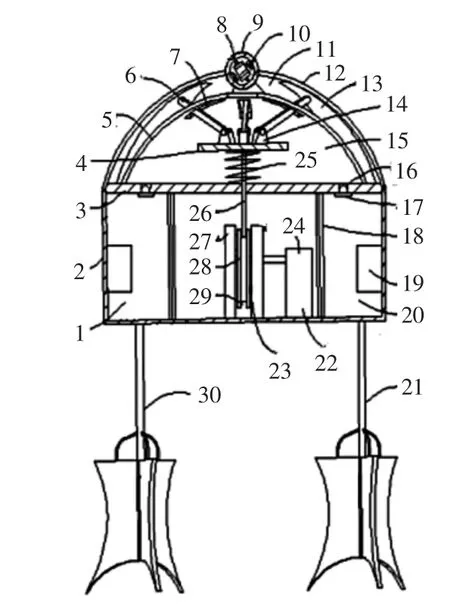
图2 仿水母机器人结构Fig.2 Structure of imitated jellyfish robot
2.1 上腔室结构设计
上腔室包括外壳体、内壳体和封板,内壳体设置在外壳体的内部。外壳体和内壳体的底部通过封板密封连接,且外壳体、内壳体和封板之间围合成第一封闭腔,内壳体的内部与封板之间围合成第二封闭腔。
外壳体外覆盖有太阳能板,且外壳体上设有第一进水机构,第一进水机构用于将外部的水周期性地输入到第一封闭腔中,其原理是通过运动板的周期性往复运动,使水流入第一封闭腔内。
内壳体上设有第二进水机构。第二进水机构用于将第一封闭腔中的水输入到第二封闭腔中,其作用在于使水持续流入下腔室,不会因第一腔室水的周期性流入而影响下腔室水流的流入。
2.2 下腔室结构设计
下腔室包括筒体及筒体内部的驱动机构、电机、增压器以及喷水机构(如图2所示)。筒体是由硅胶制成、类似于水母的柔性壳体。筒体顶部与封板下表面密封连接。筒体内设有左增压腔和右增压腔,这2个增压腔均与第二封闭腔相连通;左增压腔和右增压腔内设有增压器,增压器主要用于对左增压腔和右增压腔中的水进行增压形成压力水。
驱动机构安装在下腔室的中心位置处,它与第一进水机构相连接,并驱动第一进水机构往复运动。左喷水机构和右喷水机构设置在下腔室的底部,两者分别与左增压腔和右增压腔相连接,并分别用于将左增压腔和右增压腔中的压力水喷出至外部。
2.3 驱动结构设计
文中所设计水母机器人的凸轮直线推杆驱动结构如图3所示。图中,电机转动带动凸轮运动,使得竖杆及竖杆上的圆盘进行上下往复式的运动,圆盘上的连杆带动运动板实现伸出与缩回运动,使水进入第一封闭腔,再到第二封闭依靠增压器进行增压后,最终从左喷水机构和右喷水机构喷射得以实现运动,其中的弹簧对竖杆的回程运动起到缓冲的作用。

图3 凸轮直线推杆驱动机构Fig.3 Cam linear push rod drive mechanism
2.4 喷射结构设计
喷射结构主要包括左、右喷水机构和增压器(如图2所示)。在第二封闭腔内的水,经过增压器增压,以较大的水压通过左、右喷水机构喷出,通过水的反作用力实现仿水母机器人的运动。
3 仿水母机器人运动原理
仿水母机器人的运动由电机转动,凸轮转动,竖杆及其上圆盘的往复式运动,连杆带动运动板伸出与缩回,水流入第一腔室及单向阀、第二腔室及增压器,并最终通过左右喷水机构喷射,等不同流程所组成。仿水母机器人的具体运动流程如图4所示。

图4 仿水母机器人运动流程Fig.4 Movement flow chart of imitating jellyfish robot
该仿水母机器人通过第一进水机构,将外部的水周期性地输入到第一封闭腔中,第二进水机构再将第一封闭腔中的水输入到第二封闭腔中,接着使水从第二封闭腔中流入到筒体内的左增压腔和右增压腔中并进行加压,加压后的水分别从左右喷水机构中喷出,成为水母机器人前进的动力。同时,通过单独调节左增压腔或右增压腔中的水压,即可改变水母机器人的前进方向和角度,从而使机器人的运行姿态控制更加简单方便。
4 基于Arduino平台的模块设计
基于Arduino平台的各模块设计主要包括4大类,即控制部分、工作部分、通信部分和失效保护部分。其中,控制部分主要由位姿获取模块、Arduino平台系统和蓝牙传输模块组成;工作部分主要由探测模块和Arduino平台系统以及蓝牙传输模块组成构成;通信部分和失效保护部分分别由蓝牙传输模块、失效保护模块构成。平台各模块功能如图5所示。
4.1 Arduino平台
Arduino平台是一个单片机系统,包含有很多硬件和编程软件(IDE即编程环境)。同时,还有各种各样周边的硬件去兼容Arduino平台,并且这些硬件通常都已经带有兼容Arduino控制器的函数库。
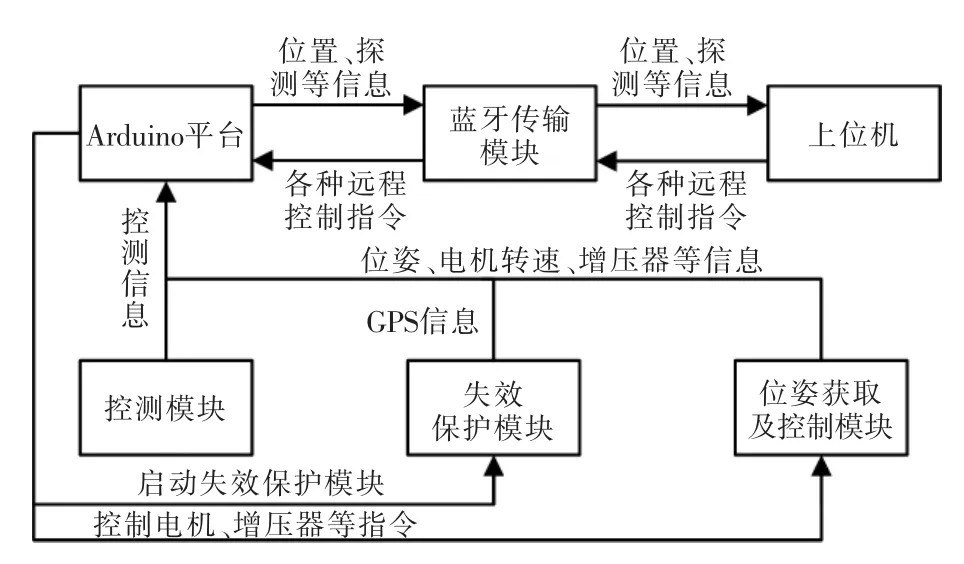
图5 平台各模块功能Fig.5 Functions of each module of the platform
该仿水母机器人的设计基于Arduino操作平台的MKS Gen V1.4主控板,采用Atmega 16微控制器,它是整个电路系统的核心,用于处理所接受与发射的信号及信息。
4.2 蓝牙传输模块
蓝牙传输模块主要用于与上位机建立通信,将水下探测信息、自身传感器信息等传输给上位机。上位机也可以通过蓝牙传输模块对水下仿水母机器人进行远程控制。
4.3 位姿获取及控制模块
通过接收安装在电机上的测速传感器和安装在顶球内的舵机来获取位姿,并通过Atmega 16微控制器实现自身姿态的调节,或者通过顶球内的扫描成像声纳等传感器来采集信息或者获取当前状况,并将信息通过蓝牙传输模块传输给上位机,岸上操作人员在获取到此平台传输给上位机的图像、姿态等信息的情况下,可通过上位机来发送指令给仿水母机器人上的微控制器控制电机转速、左右增压器压力等,最终达到控制水母机器人运动的目的。
4.4 探测模块
在水母机器人壳体底部安装有用于水下环境勘探的探测模块。该模块包括酸碱度传感器、温度传感器和流速传感器,用于探测海底复杂多变的环境信息,并将这些信息传输到上层Arduino进行处理,并通过蓝牙传输模块将海洋信息发送给上位机,用以分析海洋环境。
4.5 失效保护模块
为防止突发情况使得水母机器人失去联系和控制,系统自带失效保护模块。当系统判定已与上位机失去联系或失去控制时,系统将通过控制左右喷水机构调节机器人使其顶部浮出水面,并通过顶球内的GPS装置持续发射信号直至人为将其关闭。此外,为防止由于电源消耗殆尽以至无法发出GPS信号,外壳上的太阳能板将为其提供保障。
5 结语
所设计的仿水母人在驱动装置上采用了电机驱动凸轮转动及推杆直线运动的机械传动装置,与使用SMA材料驱动的装置相比,前者结构简单,操作灵活,传动效率高和成本低;采用了基于Arduino平台的控制系统,并设计了多种模块以完善仿水母机器人的各项功能。然而,由于未能建立起与仿水母机器人运动方向相对应的控制系统,因此远程控制较为复杂。故下一步将对该仿水母机器人的控制系统进行仿真,建立控制矩阵方程,以实现高效方便的远程操控。