一种适用于中低速磁浮的测速测距系统研究
2018-10-22孙晓光
孙晓光
(1.北京全路通信信号研究设计院集团有限公司,北京 100070;2.北京市高速铁路运行控制系统工程技术研究中心,北京 100070)
随着我国轨道交通线路的发展,中低速磁浮交通凭借其噪音低、转弯半径小、振动小、投资成本低、维护成本低等特点,借助2016年开通的长沙中低速磁浮示范线、2017年开通的北京中低速磁浮S1线的示范作用,正在逐步走入建设运营方的视野,各地正在积极推进中低速磁浮交通的落地。本文提出一种适用于中低速磁浮的测速测距方案,并基于北京中低速磁浮S1线信号系统工程项目进行现场试验,验证该测速测距系统的可行性及性能指标。
1 概述
中低速磁浮交通基于电磁悬浮技术实现列车与轨道无接触运行,北京磁浮公司、国防科技大学、北京全路通信信号研究设计院集团有限公司(简称通号院)联合相关单位对中低速磁浮交通技术工程化进行研发,在唐山建成中低速磁浮交通示范线路,通号院负责该示范线路的列车控制系统[1]。
与传统信号系统相比,中低速磁浮交通具有列车无转动轮、列车无空转/打滑、安装空间小等特点,对列车控制系统车载设备测速测距系统要求高、影响大。为了适应中低速磁浮交通系统,本文通过差置的涡流传感器组进行基础测速测距、通过加速度传感器在涡流传感器测量基础上进一步加强测速测距精度、通过交叉感应环线进行列车位置建立、走行距离校正[2,3]。
2 测速测距系统设计
磁浮列车测速测距设备的测速测距原理与传统列车的测速测距原理不同,是一种全新的测速测距方法。在应用到车载列控系统时,需解决安全性、抗干扰性、冗余性和测速测距精度的问题。
2.1 系统结构设计
测速测距系统通过电磁传感器组、加速度传感器、交叉感应环线数据、交叉点融合计算测速测距信息,测速测距系统结构如图1所示。
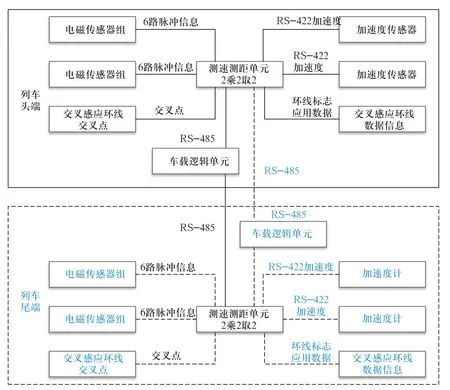
图1 测速测距系统结构图Fig.1 Structure of speed and distance measurement system
测速测距系统采集车辆上差置的电磁传感器组的脉冲信号,并实时进行脉冲一致性对比,检测可能的接口故障,并实施故障导向安全措施。同时测速单元实时监测传感器电源状态,针对可能的电源故障采取故障-安全措施。
测速测距单元通过RS-422接口获取加速度传感器,获取列车加速度信息。测速测距单元在电磁传感器测速的基础上,使用加速度信息进一步平滑运行速度、运行距离。
测速测距单元根据交叉感应环线数据信息中的环线标志判断列车所在位置,通过两个相邻交叉感应环线变化信息判断列车运行方向。
测速测距单元通过感应地面交叉环线获得交叉点信息。
测速测距单元通过RS-485以通信的方式和车载逻辑单元连接,其处理结果通过测速单元内部双CPU的取二运算,接口通信协议符合安全通信相关要求。车辆两端的测速测距单元与两端车载逻辑单元交叉连接,车载逻辑单元综合使用车辆两端的测速测距单元的测速测距信息。
2.2 测速测距算法设计
测速测距单元所使用的传感器为接近式电磁传感器,该传感器在附近有金属物和无金属物输出不同的电平,测速单元所用传感器为车辆安装6个独立的磁感应传感器构成传感器组。车辆运行过程中,磁感应传感器依次划过金属轨枕,产生脉冲信号输出,测速单元获取所有磁感应传感器输出的脉冲信号,计算后得出当前车辆运行的速度值。
车载设备依靠交叉感应环线边界及固定位置交叉点进行列车定位校正。交叉感应环线沿线路布置,向车载设备发送地面信息帧,通过该信息帧传递本环线的标识号。车载设备通过检测交叉感应环线的标识号变化,获得列车经过相邻交叉感应环线边界的顺序及时刻,计算列车当前的运行方向及位置。
交叉感应环线经过固定间隔进行交叉,当车载设备经过交叉感应环线交叉点时,车载设备接收天线检测到信号相位发生变化,形成交叉点信息。车载设备根据交叉点信息进行列车位置校正。
磁浮列车的测速测距传感器相比于传统列车的测速传感器,更容易受到干扰,测速测距设备开发中需解决抗干扰问题,在速度脉冲丢失、收到干扰脉冲、脉冲沿抖动的情况下,测速测距结果不受大影响。
在测速测距算法中,综合采用以下技术实现抗干扰。
1)脉宽滤波算法抑制脉冲沿抖动造成的随机干扰。
2)速度传感器信号时间序检查筛除干扰脉冲。
3)中值滤波算法筛除异常的脉冲对。
4)多速度传感器信号对比检测干扰。
基于上述测速传感器抗扰算法的基础上,在测速传感器测速模糊区域,综合使用加速度传感器数据、加速度预测、速度-时间曲线拟合等方法,对当前速度进行补偿计算,提高测速测距精度。
测速测距任务的主要流程如图2所示。
3 测速测距系统现场测试
3.1 测速测距系统测试方案
列车以特定速度依次经过地面进行精确测量的特定距离,通过计时器记录列车运行该特定区域的时间。与车载设备输出的测速测距单元距离值、速度值进行对比,计算测速测距精度。为了充分验证,列车应分别以匀速、加速、减速方式通过起点、终点,同样场景测试10次,以偏差值最大记录作为测试结果。
3.2 测速测距系统测试结果
测距精度测试匀速结果如表1所示。

图2 测速测距主要流程Fig.2 Main flow of speed and distance measurement
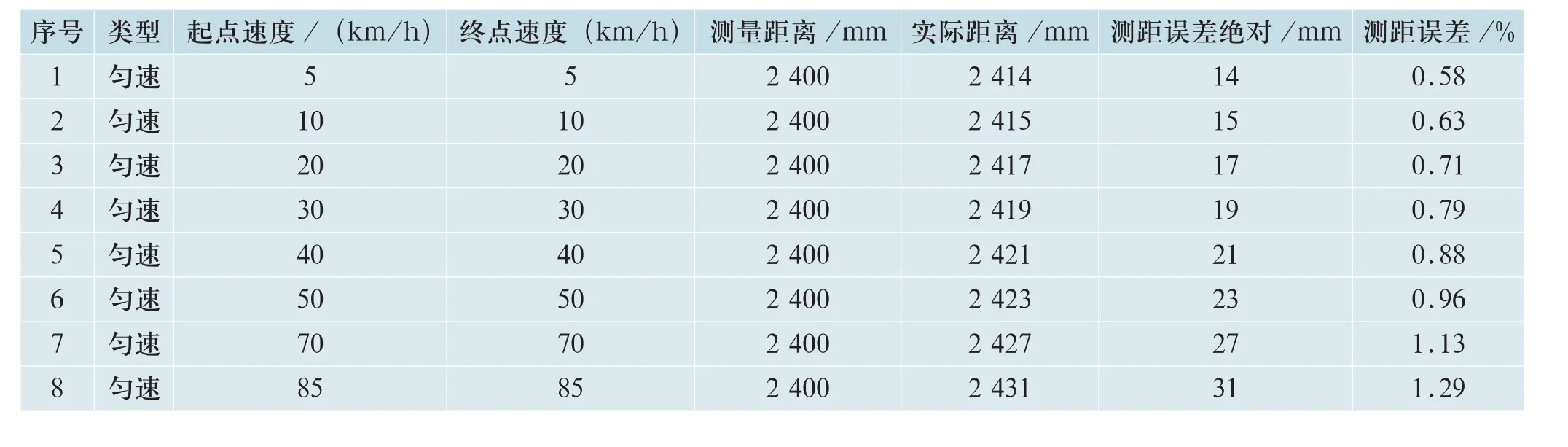
表1 测距精度匀速测试结果Tab.1 Testing results of distance measurement accuracy of trains with uniform speed
测距精度测试加减速结果如表2所示。
测速精度测试结果如表3所示。
综上所述,车载测速测距单元在匀速、加速及减速过程中,测速测距误差均小于1.5%。
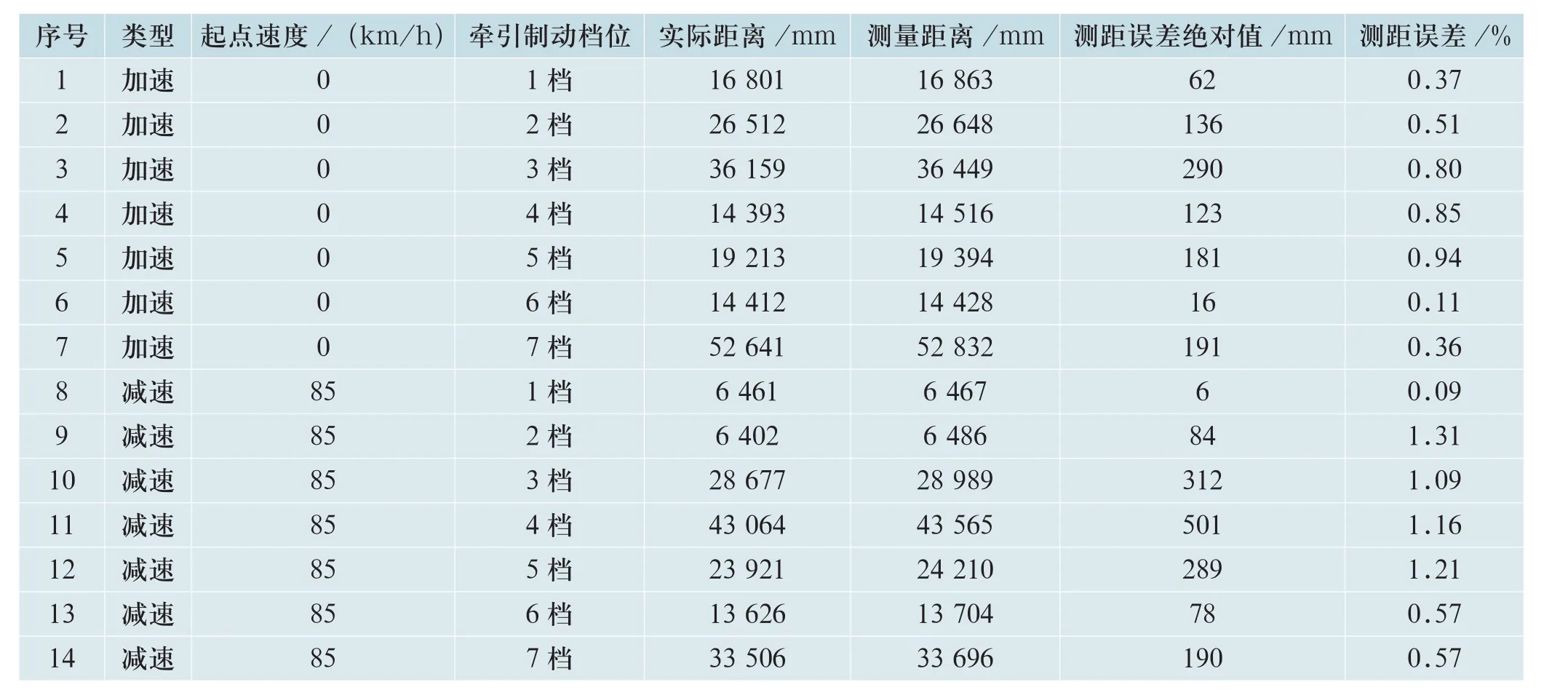
表2 测距精度加速、减速测试结果Tab.2 Testing results of distance measurement accuracy of trains speeding up and down

表3 测速精度测试结果Tab.3 Testing results of speed measurement accuracy
4 结论与展望
中低速磁浮交通因具备投资成本低、运行噪音小、维护要求低等特点,成为城市轨道交通领域的热点发展方向。本文描述了一种适用于中低速磁浮的测速测距系统,该系统应用的北京地铁S1线已于2017年12月开通运营,系统运行稳定。