基于智能大数据的矿井突发事件定位技术研究
2018-10-21梁华
梁华

摘要:当矿井下瓦斯浓度超标等事件发生时,如果不能及时检测到事件发生的位置,通常会带来非常严重的人员伤亡和经济损失。因此,我们考虑采用基于智能大数据的矿井监控系统对突发事件进行准确及时地定位操作。目前,在无限传感器网络中使用较多的定位算法是DV-Hop算法,但定位精度较差。因此本文提出了一种基于粒子群优化的改进PDV-Hop算法。实验表明,相比于原有的DV-Hop算法,PDV-Hop算法大大降低了突发事件的平均定位误差。
关键词:定位问题;DV-Hop算法;无线传感器网络;粒子群优化
引言
在矿井生产作业过程中,当某些特定事件,如矿井下瓦斯浓度超标、矿井塌陷、管道泄漏等事件发生时,如果不能及时检测到事件发生的位置,通常会带来非常严重的人员伤亡和经济损失。本文考虑采用基于无线传感器网络技术[1] (Wireless Sensor Network, WSN)的矿井监控系统对矿井的生产作业进行实时监测。在监测活动中,对象的位置信息对整个监测活动起着非常重要的作用。因此,如何及时准确地对突发事件进行定位是WSN监控系统中最急需研究的问题之一。
1无线传感器网络节点定位问题
在WSN中,现在主要的定位技术分为节点自身定位和移动目标定位,而当前提出的定位算法主要基于无需测距的算法。在无需测距的算法研究中,DV-Hop[2]算法是目前被研究得最多的算法,其主要原理是基于跳段的方式,来估算未知节点和锚结点之间的距离。目前很多的定位算法都是基于此进行改进,常见的用遗传算法 [3]、禁忌搜索[4]等算法对其做优化,也有研究采用多种混合算法,来对其做全局的优化,以增强其全局搜索能力。本文也在此基础上,提出了一种基于粒子群优化(Particle Swarm Optimization, PSO) [5]来对DV-Hop算法进行改进,以提高定位的精度。
2 DV-HOP算法
DV-Hop算法具有方法简单,定位精度较高的特点,它主要依赖节点间的信息交换和协调,由节点自行计算定位。它的实现主要分为以下三步:
(1) 计算未知节点与每个锚节点的最小跳数。信标节点向邻居节点广播自身位置信息的分组,其中包括跳段信息,且将该值初始化为0,并接受其他錨节点的最小跳数信息,忽略来自同一个锚节点的较大跳数的信息,然后将跳数值加1转发给邻居节点。
(2) 计算平均每跳距离。一旦一个锚节点得到了其他所有锚节点的信息,该锚节点就会计算平均每跳距离HopSizei,HopSizei被未知节点用来粗略估算到每个锚节点的欧式距离,即每个锚节点估计平均每跳的距离,并广播该值。
(3) 对未知节点进行定位计算。当未知节点接收到3个及以上的HopSizei值后,就可使用极大似然估计法或三边测量法来进行数学运算,估算未知节点的坐标值。当未知节点与所有锚节点的估计距离已知时,我们便可对未知节点的位置进行计算。
3 PDV-HOP算法
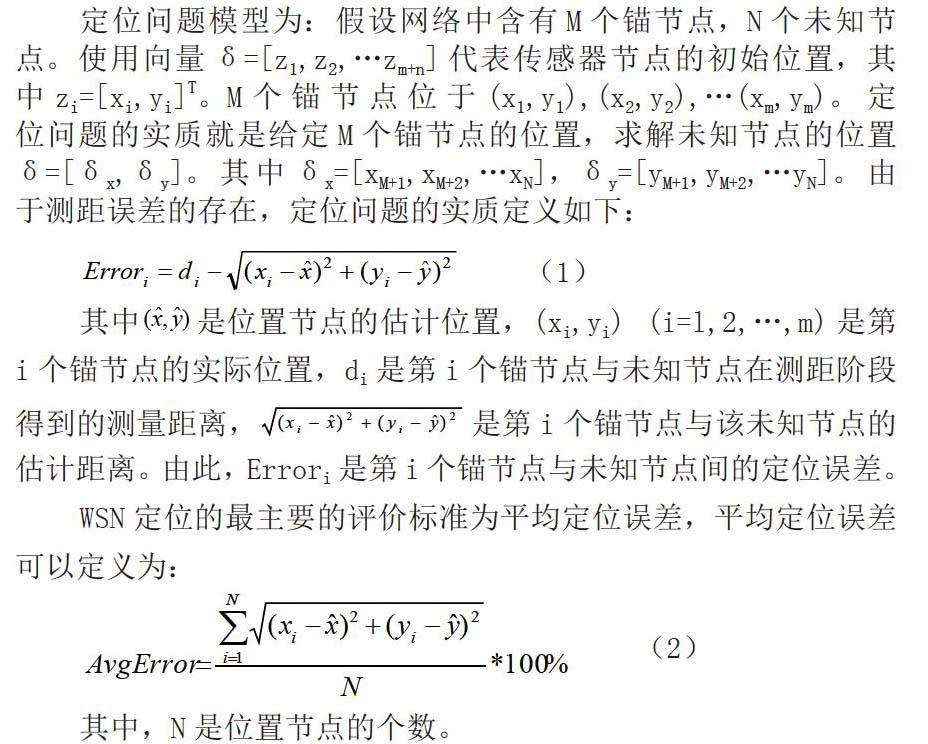
因为距离为预测值,因此存在一定的误差。定位问题的实质就是要尽量减小误差,该问题可用公式(3)表示为:
其中为位置节点的预估值,AT为锚节点的坐标位置。
本文提出的PDV-Hop算法是使用PSO算法对原有的DV-HOP算法进行优化和改进,该算法的适应度函数可用公式(4)表示:
第一步:计算每一个节点到每一个锚节点的最小跳数值和平均单跳距离,并根据最小二乘法求解未知节点的位置。
第二步:根据DV-Hop求解得出的未知节点位置初始化粒子群。
第三步:使用粒子群优化算法,计算当前粒子群的适应函数值。
第四步:根据Gbest和pbesti计算粒子群中成员新的速度,并根据该速度求得新的位置。
第五步:对新的粒子群成员进行测试,看是否符合接受标准,以此跳出局部最小值。
终止标准:当迭代次数达到我们预先设定的最大值的值时,循环停止。
4实验和结果分析
我们将基于PSO算法改进的PDV-Hop算法应用到基于WSN的矿井监控系统仿真实验中,使用Matlab 7.0对该算法进行仿真,并和现有的DV-Hop算法及MEDV-Hop算法进行比较。仿真场景设置如下:模拟在矿井下部署100个传感器节点,其中信标节点为60个,区域范围为100米×100米。控制参数被设置为:通信半径R = 15米, c1 = c2 = 2, ω = 0.6;对定位问题主要的检测标准为平均定位误差。因此本文将从定位误差上对比DV-Hop算法和PDV-Hop算法,仿真结果如图1所示:
其中1(a)图为DV-Hop算法下未知节点的定位误差,范围在3%-45%之间,平均误差在20%左右;1(b)图为PDV-Hop算法下未知节点的定位误差,范围在1%-17%之间,平均误差在9%左右。从1(a),(b)图对比可知,通过PDV-Hop算法,未知节点的定位误差降低到17%以下。
5 结论
在本文中,我们使用基于WSN的矿井监控系统对矿井下的突发事件进行监测和定位。为了提高定位的精度,我们在原有的DV-Hop算法基础上,采用PSO(Particle Swarm Optimization)算法对其进行改进,提出PDV-Hop算法。通过仿真实验结果可知,在基于WSN的矿井监控系统中PDV-Hop算法相比于传统的DV-Hop算法,平均定位误差减少了55%,在不需增加额外硬件支持的情况下,大大降低定位误差。因此,在实际的基于WSN的矿井监控系统中使用该算法,可以大大提高监控系统的定位精确度。
参考文献:
[1] Akyildiz IF, Su W, Sankarasubramaniam Y, Cayirci E. A survey on sensor networks [J]. IEEE Communications Magazine, 2002, 40(8):102-114.
[2] D. Niculescu and B. Nath. DV Based Positioning in Ad hoc Networks. Journal of Telecommunication Systems[J], 27(5), 136-142, 2003.
[3] D. E. Goldberg. Genetic Algorithms in Search, Optimization and Machine Learning[M], Reading, Mass. Addison Wesely, 1989.
[4] J. A. Bland and G. P. Dawson, Tabu Search and Design Optimization[J], 1991, 23(3):195-201.
[5] 叶蓉,赵灵锴. 基于蚁群粒子群混合的无线传感器网络定位算法[J] . 数据测量与控制,2011,19(3):732-735.