基于FPGA的智能火灾报警与自动灭火系统
2018-10-18韩晓冰刘小斌
韩晓冰,刘小斌
(西安科技大学 通信与信息工程学院,陕西 西安 710054)
0 引 言
目前,大部分物流仓库场所都是利用火焰的温度、烟雾和光的特性对火灾进行探测,预防火灾的发生。但物流仓库空间大、环境复杂,仅利用感烟、感温、感光等传感器进行探测的效果极不理想。只有当火灾发生到一定程度的时候才会做出响应且由人为手动操作灭火处理。但这种方式存在严重的安全隐患,况且如今室内用的火灾报警系统多数都是采用有线传感器网络。这种方案不仅布线繁琐、扩展不便,而且有线线路很容易被各种物质腐蚀、破坏。特别是检测到火苗后采取的灭火措施远远达不到智能自动化的程度,都是在人工获取到火灾的报警信息后才能实施各种灭火措施,无法实时高效的防患于未然。
因此,为了充分利用视频图像信息的丰富性和直观性,文中设计了一种视频图像实时在线检测火焰信息与灭火系统。采用视频图像识别火焰技术具有如下优势:即使在大范围、高湿度、多粉尘的室内,都可以良好、稳定地应用。工作人员上班时可以实时在线的对仓库进行监控,及时了解仓库的信息。下班后也可以通过GSM短信消息及时了解有无火灾情况。摄像头一旦检测到火焰时,水炮会立即根据视频图像检测到火焰发生的位置,快速做出灭火处理措施,并且将火灾信息及时地发送到工作人员的手机中。从而实现了即便在各种不同恶劣环境下,也可以准确地检测火灾信息,高效地处理火灾情况。该设计极大的减轻了工作人员的工作量,同时也降低了各物流厂商的成本,很好地解决了仓库全天候的火灾预防问题。
1 系统整体设计结构框图
该设计采用软硬结合的方式构成一个完整的系统。用硬件方法完成具体器件的功能配置、数据采集和初期简单的数据处理;用软件方法完成火焰检测的算法设计,从而实现软硬件协同工作。当然,其最突出的优势是通过摄像头采集,火焰检测及识别,VGA实时视频显示和舵机云台控制的消防设备等多个模块集合到一个体积较小的硬件系统中,使得系统更加小型化、便利化。如图1所示,该系统由基于Altera公司的Cyclone IV系列FPGA芯片EP4CE115F29C 7单元,视频图像采集模块,基于舵机云台的灭火模块,Zigbee终端与协调器模块,GSM和PC机模块等组成。其中FPGA控制板主要完成硬件的控制以及智能火焰检测识别算法的硬件映射。TRDB-D5M摄像头作为视频采集元件,将采集到的图像数据处理后帧缓冲于DDR中,经VGA接口将视频传送至显示器显示。利用Arduino开发板可以随意旋转舵机云台控制灭火设备随时对准火苗,并且Zigbee可以及时的将火灾信息发送到PC机监控中心,同时GSM模块也会及时地将发生火灾的消息通过短信的方式告知工作人员。这样不仅可以及时地让工作人员了解到有无火灾的信息,也可以通过灭火设备迅速对火苗进行灭火处理,检测响应速率可以达到MS级别。
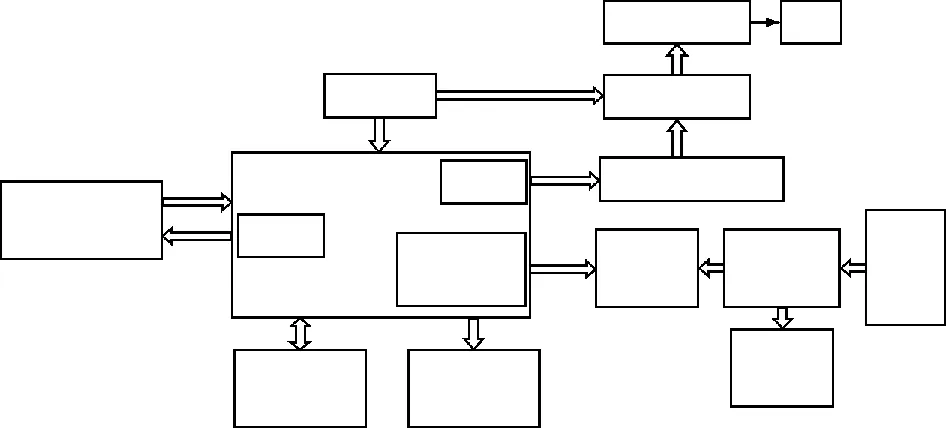
图1 系统的整体结构Fig.1 Overall structure diagram of the system
1.1 FPGA顶层设计视频图像采集
如图2所示,其中基于FPGA的视频图像采集处理的顶层模块包括:TRDB-D5M数字摄像头初始化模块、视频图像采集模块、视频图像数据格式转换模块、多端口DDR控制器模块、VGA接口控制模块、智能火焰检测及定位进而自动灭火模块等。

图2 视频图像采集顶层模块Fig.2 Video image acquisition top-level module block diagram
该视频采集模块采用TRDB-D5M摄像头进行视频图像的实时在线采集。如果想多添加几个摄像头同时工作,可由FPGA(DE2-115)GPIO口的扩展卡子卡通过外扩就可以实现多个GPIO口同时驱动多个摄像头进行工作。该摄像头的像素动态范围能达到70.1db,有效距离能达到3~10 m(如果需要可以根据有效距离的不同换取远距离摄像头),有效测量角度范围也可以达到30°~80°。当遇到光线特别暗或者特别亮的场景时可以手动按键(key0和key1)控制摄像头焦距进行摄像镜头补光或者减光等操作,使采集到的视频图像更加清晰。
摄像头具体工作流程如下:①FPGA通电后首先控制I2C接口对摄像头进行功能配置,然后通过控制摄像头的输出时序,采集有效的像素数据;②将摄像头采集到的有效像素数据存储到DDR存储器中,同时将采集到的RGB数据转化为YCbCr格式数据;③在YCbCr色彩空间中进行火焰检测处理系统依据算法需求抽取缓存中的部分帧图像,用于实现火焰检测的算法并输出火焰的定位信息,并将转化后的图像送至VGA显示器显示;④判断异常图像,确定是否需要灭火,若要灭火则依据定位信息,通过串口发送云台控制指令,以控制云台实现灭火,同时发出预警信息给Zigbee系统。
1.2 基于FPGA的各硬件控制
由FPGA作为主控制单元控制的硬件有:视频图像的火焰检测模块、舵机云台控制水枪灭火模块、Zigbee无线通信模块和GSM发送信息报警模块。其中,云台灭火模块采用的是基于Arduino的板卡作为舵机控制板,通过舵机控制板来控制舵机云台360°的旋转与消防设备实施灭火,该模块与FPGA的连接方式是通过FPGA的14脚外扩接口EX_IO控制进行数据传输;采用CC2530系列的Zigbee进行信号的无线传输,传输距离室内一般可以达到53 m,较空旷之地传输距离甚至能达到400 m,该模块与FPGA的连接方式是通过FPGA的UART接口控制通信;GSM模块采用的是芯讯通无线科技有限公司生产的SIM900A,该模块与FPGA的连接方式是通过FPGA的14脚外扩接口EX_IO的方式进行数据传输。
通过以上各硬件模块接口的互相连接,组成了由FPGA控制的视频图像实时在线火焰检测及灭火系统。FPGA作为主控制单元进行视频图像地采集和处理,然后将处理的结果通过不同的接口方式发送至各个终端模块,最后由各个终端模块进行相应的灭火操作及报警提示,极大地提高了整个系统的运行速率。
2 系统软件设计
2.1 火焰识别算法的原理
通常,火焰最明显的特征就是颜色和其运动动态,一般只需要通过检测火焰的颜色特征就可以准确判定该火焰的燃烧区域,因此本系统针对颜色特征信息进行深入分析,从而实现智能火焰识别及检测。
火焰检测的基本思想就是通过颜色空间转换,将RGB数据转为YCbCr数据。然后根据火焰的图像特征和背景图像的特征差异,然后结合图像处理算法中的阈值,就能方便识别出火焰并对其进行定位。严格来说,YUV色彩空间是一种模拟表示,而与其相对应的数字表示是YCbCr颜色空间。其中Y指亮度,Cb,Cr分别指色彩度和饱和度。但是数字摄像头采集到的初始数据却是RGB数据,它有对光照过于敏感的重要缺陷。况且每一个像素点都是由RGB分量组合,无法接受分离的像素值转换成亮度和色度。所以,为了准确、稳定地实现视频图像火焰识别检测,首要任务就是将RGB数据格式转化为YCbCr数据格式,其转换公式如(1)所示。


(1)
当把RGB颜色空间的数据转换为YCbCr颜色空间的数据后,基于FPGA的视频图像火焰检测识别算法具体分析如下。
2.1.1 基于Y和Cb颜色的火焰特征
对于给定图像,定义它的YCbCr颜色空间均值如式(2)所示。
(2)
式中 (Xi,Yi)为图像对应点的空间位置的像素点,Ymean,Cbmean,Crmean,分别为Y,Cb,Cr颜色空间所对应的平均亮度值和平均色度值,k为整副图像的总像素数。通过实验测试可知,火焰信息在YCbCr色彩空间中最明显的就是Y,Cb,Cr都在它们相对的平均水平值之上,并且每张图像的各个像素点对应的Y值都大于Cb.因此可以用这点当作算法的依据,故其公式如式(3)所示。

(3)
2.1.2 基于Cr和Cb颜色的火焰特征
对于火灾中火焰像素还有很多的其他特点,这些特点都可以作为火灾火焰像素检测,其中另外一个特点就是对于这些火焰每个像素点的Cr值都大于这个像素点的Cb值,其对应的公式如式(4)所示。

(4)
2.1.3 基于YCbCr颜色的火焰特征
将火焰的亮度值Y,色彩Cb和饱和度值Cr几种特点结合。让火焰每个像素点的亮度值Y都大于该像素点的Cb值,结合后的具体公式如式(5)所示。
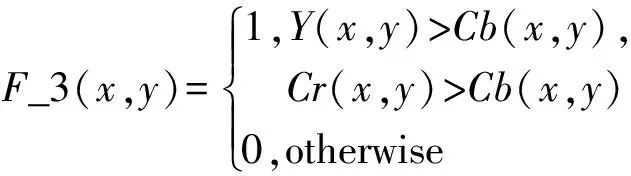
(5)
2.1.4 基于YCbCr颜色及其均值的火焰特征
通常Y,Cb,Cr3个通道中的平均值Ymean,Cbmean,Crmean就可以表示一幅完整图像的主要信息了。而在本系统的算法中,使得Y分量值大于整体图像Y平均值,Cb分量值小于整体图像Cb平均值,Cr分量值大于整体图像Cr平均值。公式如式(6)所示。
(6)
其中上式的所有F(x,y)表示任何满足公式条件的像素都将被标记为火焰像素。
基于YCbCr颜色空间5个火焰特征的混合火焰识别算法具有良好的火焰识别能力和抗干扰能力,无论是室内还是室外都能很好地识别出火焰区域。所以文中将采集到的视频图像的每一帧都分别采用基于YCbCr颜色空间5个火焰特征的混合火焰识别算法进行检测和识别。由检测结果可以看出基于YCbCr颜色空间5个火焰特征的混合火焰识别算法可以准确的将火灾中的火焰区域提取出来。
2.2 软件设计工作流程
板级程序下载后,通过串行通信协议IIC总线对摄像头的参数配置,摄像头就可以实时在线进行视频图像采集。将采集到的视频图像经过色彩空间的格式转换,就可以在Quartus Ⅱ 13.1的开发平台实现FPGA的算法映射,经FPGA处理后将处理的结果通过不同的接口分别传输至各个终端模块进行相应的处理。一旦.sof文件下载后,整个系统就会一直处于检测、处理的循环状态,具体流程如图3所示。
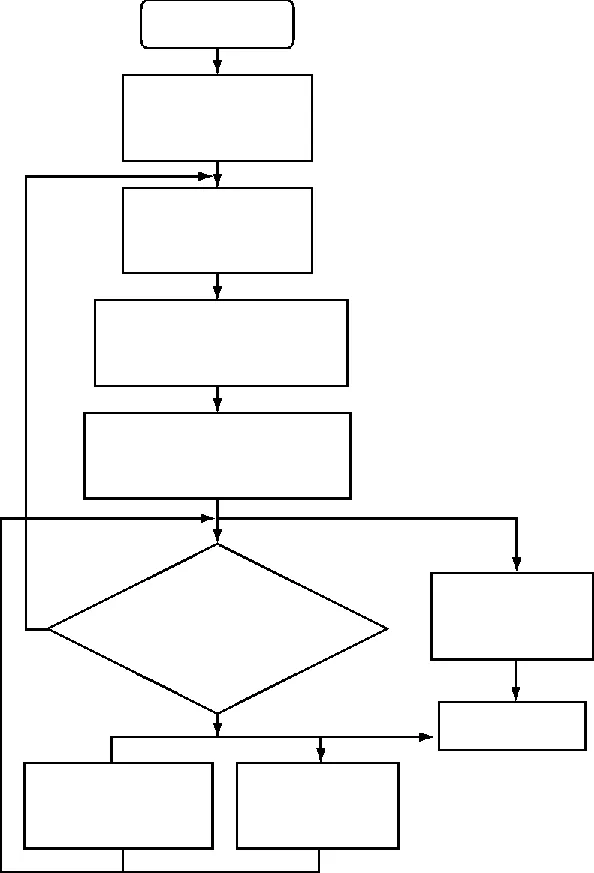
图3 软件设计工作流程Fig.3 Flowchart of software design
2.3 基于Labview的上位机
本系统中的上位机系统是采用由美国国家仪器(NI)公司研制开发,编写软件方便直观的Labview程序开发环境开发。在上位机中通过Labview编写,实现了串口与Zigbee协调器通信的人机交互界面,同时PC机也能够实时获取报警信息。
3 实验结果
该系统中研究了同一颜色空间不同特征算法的火焰特征,并基于这些不同的特征算法分别进行了火焰的识别。从而得出不同的算法其自身的优点与缺点,若将这些算法单独孤立的对火灾图像进行检测并不能获得较好的火焰识别效果。因此,本系统将这些算法恰当的结合在一起,互补了单独算法的不足,从而能够更加及时、准确的检测识别出图像中的火焰像素。其颜色空间融合,主要利用图像数据表示为不同的颜色通道,将每一个专门的颜色通道通过不同特征提取和阈值判定等方式最终合并来获取彩色融合图像。整个算法融合的流程全部是基于Quartus Ⅱ 13.1的开发环境采用纯硬件描述语言(Verilog)编程实现。
如图4所示,当火焰位置移动时消防水龙头对火焰的跟踪效果图。其中当火焰分别由左侧移至右侧,上侧移至下侧时,舵机控制水龙头及时自动跟踪火焰位置移动,从而对实时监控检测到的火焰及时进行灭火处理,将火灾消灭在初级阶段。
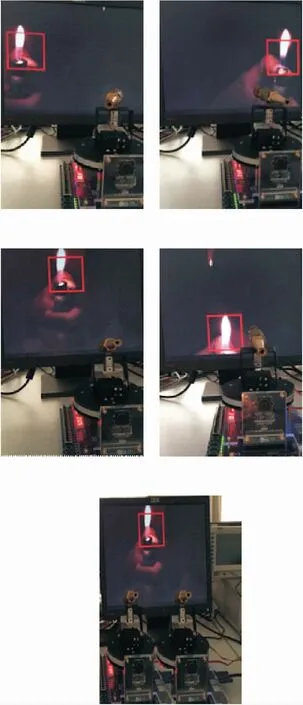
图4 火焰检测定位与消防水龙头的跟踪Fig.4 Flame detection and tracking of fire hydrant
与此同时,当检测到火焰时,通过串口与Zigbee协调器通信,及时对上位机系统进行报警且通过GSM模块进行短信通知相关工作人员,GSM短信接收及上位机系统报警效果如图5所示。

图5 检测到火焰的报警界面及GSM短信消息Fig.5 Detection of flame alarm interface and GSM SMS message
当涉及到多摄像头同时工作时可以通过连接TRDB-D5M的外扩子卡完成多个摄像头连接,具体连接接口如图6所示。

图6 连接多个摄像头的外扩子卡Fig.6 An external expansion card connecting multiple cameras
4 结 论
1)采用基于FPGA的智能火灾报警及自动灭火的系统稳定、检测精度高、方便使用,可以到达预期结果;
2)利用FPGA高速并行处理数据的特点,进行火焰检测算法的映射实现达到了视频图像实时检测的需求,很好地解决了传统PC机及嵌入式器件低速的问题;
3)通过视频图像无接触式的进行火焰信息检测,很好地克服了传统传感器检测信息不丰富且不稳定的现象;
4)系统既能实时在线检测火焰信息,又能实时控制灭火装置及时进行灭火处理,同时还会将检测到的火焰信息立即通过短信告知相关工作人员,适用于各种室内场合。
