欧洲“移除碎片”试验卫星即将进行在轨试验
2018-10-18王雪瑶北京空间科技信息研究所
王雪瑶(北京空间科技信息研究所)
2018年4月2日,由欧洲萨瑞航天中心(SSC)负责研制的“碎片移除”(RemoveDebris)试验卫星搭载猎鹰-9(Falcon-9)火箭上的货运“龙”(Dragon)飞船运送至“国际空间站”(lSS)。2018年6月20日,“国际空间站”航天员使用空间站实验舱遥控机械臂系统成功在轨释放RemoveDebris试验卫星,试验卫星也成功与地面建立联系。按照计划,该卫星将在轨开展人造“空间碎片”网捕任务演示、视觉导航(VBN)任务演示、鱼叉捕获任务演示、“阻力帆”离轨任务演示4项在轨试验任务,其任务时间分别定为2018年9月、12月以及2019年2月和3月。虽然RemoveDebris任务使用人造空间碎片作为抓捕目标,不是一次完整意义上的主动碎片移除任务,但这将成为世界首例主动碎片移除(ADR)试验任务。
1 项目背景
RemoveDebris试验卫星是由欧洲委员会(EU)和萨瑞航天中心资助,由萨瑞卫星技术公司(SSTL)领导、空客防务与航天公司(ADS)等10家商业公司在“第七研究和技术开发框架计划”(FP7)的支持下,共同研制的主动碎片移除技术验证任务。该任务将成为世界首例主动碎片移除试验任务,主要为未来主动碎片移除任务提供低成本的在轨技术验证,进一步推动欧洲乃至世界主动碎片移除路线的发展。
多年来,空间碎片捕获移除项目的发展曾经面临着资金紧张的难题,其政府资助与保险补贴资金有限,而且商业公司也并不热衷这一发展方向。但是近年来空间碎片数量剧增,造成空间碰撞事件频发,空间碎片超高速撞击会穿透航天器表面并破坏航天器内部器件和系统,并造成航天器严重损伤,甚至导致航天器彻底解体或爆炸失效,并形成大面积碎片云,危害极大。而且随着宽带卫星星座的规划发展与大规模部署,空间碰撞风险也在进一步增加,因此目前对空间碎片的移除需求越来越大,碎片移除市场的前景也逐渐广阔,主动碎片移除在这一契机下发展起来。同时,欧洲航天局(ESA)在碎片移除方向提出了“清洁太空”发展路线图,主要目标聚焦点包括发展空间碎片减缓技术,而RemoveDebris技术试验也将为这一目标做出贡献,进而推动路线图的发展。
2 卫星情况
RemoveDebris试验卫星由SSTL—42“移除卫星”(RemoveSat)试验平台和2颗2U立方体试验“碎片卫星”(DebrisSat)组成,质量约为150kg,将成为迄今为止从“国际空间站”释放的最大卫星。RemoveSat平台外形为0.65m×0.65m×0.72m立方体,搭载2台监控相机,1台专用于拍摄网捕试验过程,视场为65°×54°,另1台专用于拍摄鱼叉捕获试验过程,视场为17°×14°,2台监控相机能够以10帧/s的速度采集1280×1024像素的图像。平台数据下传采用S频段,速率为2Mbit/s。2颗试验“碎片卫星—1/2”(DebrisSat—1/2)是人造“空间碎片”试验目标,由萨瑞航天中心负责研制,其中DebrisSat—1是网捕试验的抓捕目标,用于试验网捕碎片技术;DebrisSat—2是视觉导航任务的非合作自主交会目标,用于试验自主视觉导航技术。RemoveDebris试验任务的地面操作中心是位于萨瑞卫星技术公司的任务操作中心(MOC)。
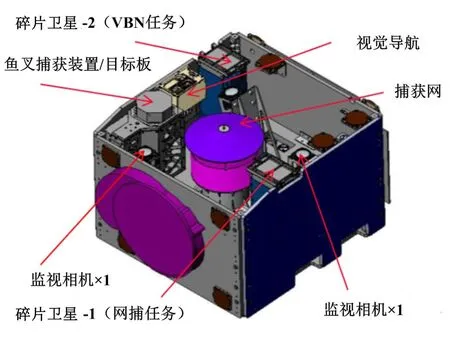
“移除碎片”任务试验平台
3 在轨主动碎片移除技术试验
一般来说,空间碎片主动移除过程包括与空间碎片进行非合作交会、近距离接近、在轨捕获和离轨等关键步骤,RemoveDebris试验卫星计划在轨进行视觉导航、网捕、鱼叉捕获和“阻力帆”离轨4项关键主动碎片移除演示试验,来提高相关主动碎片移除技术的成熟度。RemoveDebris试验之所以进行视觉导航任务演示,是因为基于视觉的相对导航系统是碎片主动移除的非合作交会和近距离接近过程中所需要的关键技术,也是在空间碎片移除类复杂任务进行首次尝试应用;之所以进行在轨网捕碎片和鱼叉捕获碎片任务演示,是因为这将是未来碎片移除在轨抓捕过程中较为关键的2项技术,同时又结合整个项目成本考虑,例如欧洲首个低轨大型碎片移除任务“欧洲离轨”(e.Deorbit)经反复论证后选择网捕抓捕方案;最后进行“阻力帆”离轨演示任务,是因为既要验证主动碎片移除的离轨关键技术,又需要符合欧洲“清洁太空”发展路线图的要求,避免产生新的空间碎片,实现碎片减缓的任务目标。
网捕碎片演示任务
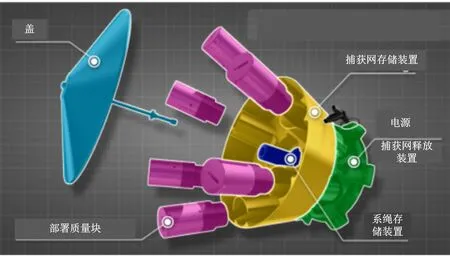
网捕系统结构示意图
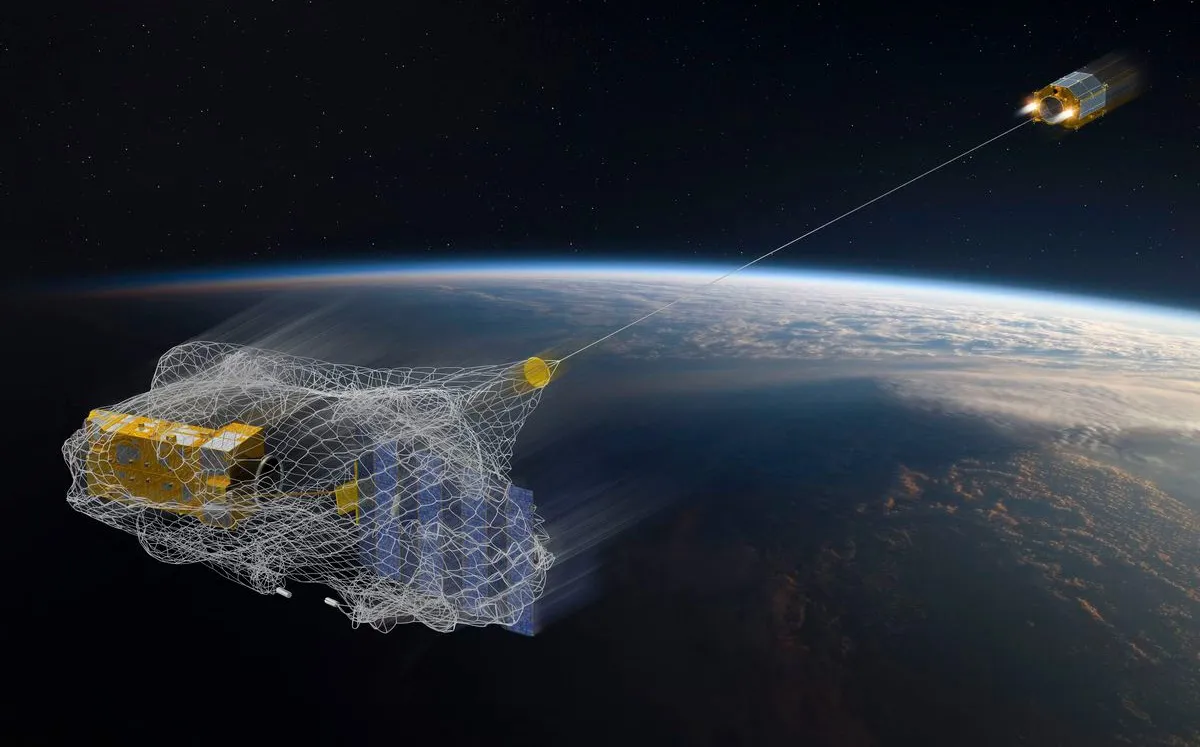
RemoveDebris试验卫星的首个在轨演示任务是网捕DebrisSat—1目标碎片卫星。网捕系统是发展前景最好的空间碎片捕获结构之一,适用于不同形状、尺寸和翻滚率的目标。RemoveDebris任务网捕系统由德国空客防务与航天公司负责研制。抓捕网需要依靠部署质量块的加速运动将其拉出存储装置,才能实现展开部署。RemoveDebris抓捕网由凯夫拉尔纤维制作而成,展开后为5m直径的大型半球形网,净质量0.6kg,网眼尺寸80mm,可防止目标物在捕获后逸出。抓捕网的设计目标捕获尺寸达2m,在轨演示任务期间将捕获直径约1m的DebrisSat—1目标碎片卫星,未来更大型的网捕系统可捕获直径12m的空间目标。
在该演示任务试验中,首先RemoveSat卫星平台将模拟空间碎片的DebrisSat—1目标卫星以5cm/s的速度低速喷射而出,在喷出过程中,DebrisSat—1卫星充气膨胀至直径约1m的八面体结构。随后,RemoveSat卫星平台释放抓捕网,抓捕网一旦接触到目标后,网末端部署质量块将会带动抓捕网缠绕目标,同时启动方向锁定离合器将抓捕网卷起,防止其重新打开。最后,DebrisSat—1卫星与抓捕网共同加速离轨。
视觉导航演示任务
网捕任务完成后,RemoveDebris试验卫星将完成视觉导航试验任务。法国空客防务与航天公司负责视觉导航方案设计与设备系统研制,法国国家信息与自动化研究所(Inria)负责设计视觉导航算法。RemoveDebris视觉导航试验任务主要通过试验卫星平台的星载拍摄设备获取目标实际在轨图像与数据,演示最先进的图像处理与导航算法,其中平台星载拍摄设备包括1台传统的2D相机和1台创新型闪光成像激光雷达(LiDAR Camera),前者属于无源成像仪,后者属于3D主动成像仪。试验卫星可通过测算2台成像仪对于非合作交会目标的信号相位差实现测距功能,进而实现自主导航。这将是欧洲首次使用创新型闪光成像激光雷达来进行自主视觉导航,未来这一技术将会应用于空间碎片追踪与捕获任务。
在该演示任务试验中,首先模拟碎片的DebrisSat—2目标卫星在平台释放位置打开太阳电池翼并开启星载服务,同时平台对DebrisSat—2目标卫星进行GPS锁定并开启平台与目标星之间的星间链路。随后,RemoveSat卫星平台释放DebrisSat—2目标卫星,平台星载2D相机与闪光成像激光雷达对DebrisSat—2进行拍摄测距与自主导航试验。在这一过程中,DebrisSat—2目标卫星上收集的试验数据也会通过星间链路传回RemoveSat试验平台,用于辅助导航。
鱼叉捕获演示任务
视觉导航任务完成后,RemoveDebris试验卫星将完成鱼叉捕获任务演示。鱼叉捕获系统也是未来空间碎片捕获设计结构之一,此次试验将为未来鱼叉式捕获空间碎片系统的设计提供参考。RemoveDebris鱼叉捕获试验系统由可展开式目标结构与鱼叉捕获系统组成,萨瑞航天中心负责研制可展开式鱼叉目标结构,捕获装置研制经验较为丰富的英国空客防务与航天公司负责研制鱼叉捕获装置。
在该演示任务试验中,首先RemoveSat卫星平台通过延伸可展开式悬臂,移出固定在悬臂末端的铝蜂窝质目标板,到达1.5m处的目标试验位置;随后,平台弹射鱼叉捕获装置对目标板进行叉捕试验,鱼叉通过系绳与卫星平台连接,平台内部的冲压式加速器可为鱼叉提供20m/s的弹出速度,使鱼叉有能力叉捕目标板;最后,卫星平台收回悬臂、鱼叉与目标板,以防对最后的“阻力帆”部署产生影响。
“阻力帆”离轨演示任务
为避免在空间中产生更多碎片,保持清洁的太空环境,在整个在轨演示任务最后,RemoveDebris试验卫星将进行“阻力帆”离轨任务演示。RemoveDebris的“阻力帆”是由萨瑞航天中心研制,整个“阻力帆”系统由部署器、帆面展开机构、碳纤维骨架和帆膜构成,其中部署器可伸长约1m,“阻力帆”完全展开可达10m2。
在该演示任务试验中,首先RemoveSat卫星平台伸长桅杆式“阻力帆”部署器约1m;随后平台通过电机控制帆面展开机构,使碳纤维骨架与帆面充分展开;“阻力帆”展开后会产生较大阻力,因此RemoveDebris试验卫星会加速离轨。由于“阻力帆”的尺寸很大,试验平台在加速离轨过程中不能保证星地的无障碍通信与星上的全功率完整,地面控制中心可通过卫星姿态数据、功率数据和通信系统数据等来评估部署“阻力帆”对试验卫星的影响,也可跟踪试验卫星的离轨轨迹,并与无“阻力帆”离轨的模拟数据进行比较。
4 总结
RemoveDebris试验任务的目标是以较低成本在轨演示网捕、鱼叉捕获空间碎片,自主视觉导航及离轨等关键主动碎片移除技术,这些新型技术可用于未来的主动碎片移除任务。RemoveDebris试验任务将成为世界首例在轨使用网捕系统和鱼叉捕获系统进行空间碎片捕获的任务,并首次将立方体卫星用作“人造碎片”目标。虽然此次任务使用“人造碎片”立方体卫星作为目标,不是一项完整的主动碎片移除任务,但是完成该任务将是未来实现完整主动碎片移除操作任务的重要一步,可以推动欧洲及世界主动碎片移除路线图的发展,也是未来实现“清洁太空”目标的重要前提。