石墨烯/聚二甲基硅氧烷三维非织造结构压阻柔性压力传感器*
2018-10-17卢韵静于星元田明伟曲丽君
卢韵静,于星元,田明伟,曲丽君*
(1.青岛大学智能可穿戴研究中心,山东 青岛 266071;2.生物纤维与生态纺织品国家重点实验室,山东 青岛 266071;3.山东省生态纺织品协同创新中心,山东 青岛 266071;4.聊城纤维检验所,山东 聊城 252004)
近年来,由于可以用于电子皮肤[1]、人体生理活动检测[2]、人机界面[3]、可穿戴医疗设备[4]和柔性机器人[5]等领域,可穿戴传感器引起了巨大关注。可穿戴式传感器是一种基于一般传感器制成的具有柔韧性、弹性及弹性恢复力、可穿戴性等特点的特制传感器[6],是一种可以将被检测物体的信息转换成电信息参数的一种装置,是智能纺织品用于检测、观察外界信息情况与变化的不可缺少的部分。目前可穿戴传感器主要以观测人体运动情况、生理参数和环境情况为主,主要功能包括监测运动行为、测量身体参数、分析周围环境及人体身体的成分改变等[7]。根据信号转换机制,传感器可大致分为压阻式传感器、压电式传感器、电容式传感器、力致发光式传感器和摩擦电式传感器五类[8]。压阻式传感器构成简单,制备过程容易,并且具备高灵敏度和强稳定性等特点,在日常生活和工业活动中都有广泛的运用[3]。
压阻式压力传感主要包含三种成分:活性材料、柔性基材和导电性电极。活性材料可以将外力变化转变成电信号的变化并通过电极输出。柔性基材是压阻传感器的另一个重要成分。二维和三维的柔性基材在压阻传感器中最为常见。对于二维结构而言,膜和织物广泛用作柔性基材。张等[9]将纳米金颗粒沉积在聚二甲基硅氧烷膜上形成导电层,而制备的薄膜压力传感器灵敏度高(约15 kPa-1),响应时间短(<100 ms),可以检测出实时的空间分布。然而,由于二维结构的有限变形,二维压力传感器无法满足某些大型压缩变形情况下的传感要求。相反,具有3D结构的压力传感器由于高孔隙率、高压缩率和三维结构的灵活性成为很好的替代材料。目前,三维海绵和泡沫是两种常见的柔性基体。于等[10]将石墨烯创造性地结合到聚氨酯海绵中,通过浸涂法制备出灵敏度为0.26 kPa-1的三维压力传感器。该传感器在不同应用压力下的电流与电压呈良好的线性关系,具有良好的重复性。除海绵外,3D非织造布是一种具有吸收性、韧性、拉伸性、柔软性、强度和可洗性等功能的工程织物。不同于其他三维材料,非织造布的纤维是随机均匀分布的,导致各向同性内部结构。而非织造布中的随机纤维被认为是连续的、灵活的、可压缩的、可恢复的,赋予了传感器高灵敏度、非凡的灵活性和耐久性。
因此,在我们的研究中,我们采用一种可行的方法来制备柔性、耐用的压阻式压力传感器。在三维聚酯非织造布上通过浸渍的方法接枝氧化石墨烯(rGO)和聚二甲基硅氧烷(PDMS)。组装成的压阻式压阻传感器灵敏度高、柔性好、反应迅速、稳定性强。该压阻传感器可以识别人体不同部位的运动,包括手指、喉咙等部位的形变。
1 实验部分
1.1 材料
非织造布(300 g/m2,厚度10 mm,东莞非织造科技有限公司),氧化石墨烯(20 mg/mL,通过实验室改进的Hummers方法[11]制备),铝箔(厚度为0.1 mm,深圳电子科技有限公司),聚二甲基硅氧烷(天津化学试剂有限公司)。
1.2 还原氧化石墨烯/聚二甲基硅氧烷改性非织造布压阻式压力传感器的制备
首先,将62.5 mL固含量为20 mg/mL的氧化石墨烯溶液分散在500 mL的蒸馏水中,超声10 min。将非织造布在石墨烯溶液中浸泡10 min,然后,将其放入烘箱中100 ℃烘干获得氧化石墨烯改性非织造布。接枝在非织造布上的氧化石墨烯被放入管式炉中200 ℃还原,180 min后取出。两片铝箔(40 mm×10 mm)作为电极固定在复合物两端。然后,将聚二甲基硅氧烷倒入放有还原氧化石墨烯改性非织造布的玻璃器皿中烘干1 h,获得还原氧化石墨烯/聚二甲基硅氧烷改性非织造布压力传感器。
1.3 表征
采用扫描电镜(SEM)对三维非织造布进行形态学分析,用傅里叶变换红外光谱(FTIR)对氧化石墨烯的还原过程进行了表征。
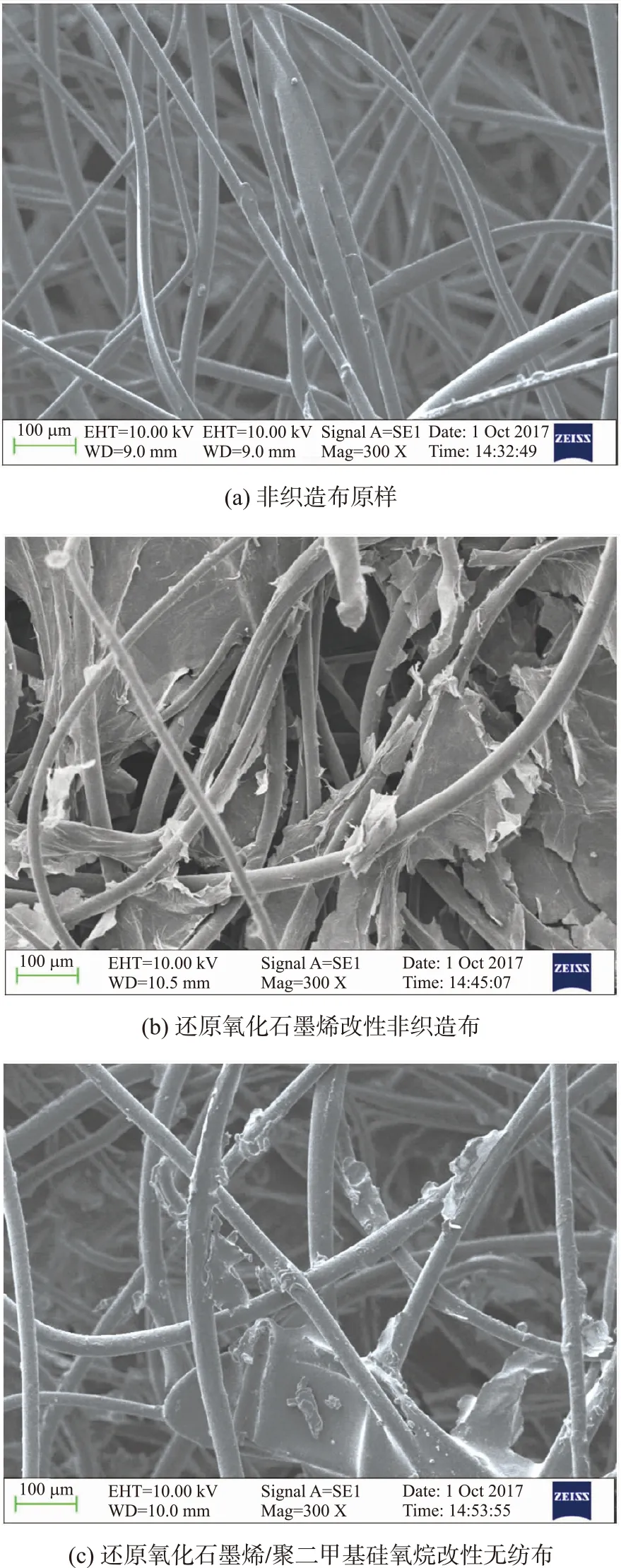
图1 扫描电子显微镜图
2 实验结果与讨论
2.1 还原氧化石墨烯/聚二甲基硅氧烷改性非织造布的形态和结构
通过扫描电子显微镜对非织造布的表面形态进行表征,结果如图1所示,聚酯纤维随机均匀分布,非织造布具有三维网络结构。如图1(a)所示,非织造布原样上单根涤纶纤维表面光滑;图1(b)中,还原氧化石墨烯改性非织造布在经历氧化石墨烯涂层和还原过程后与原样显示出不同的形貌,纤维均匀地覆盖了皱纹层,表明在合理的分散条件下,纤维上沉积了还原的氧化石墨烯纳米薄片;图1(c)中,经历聚二甲基硅氧烷封装后,非织造布上大多数的还原氧化石墨烯的纳米起皱结构消失了,这是由于聚二甲基硅氧烷涂层的重叠作用,使得非织造布基体表面恢复光滑。因此,经过上述两步处理之后,还原氧化石墨烯纳米层和聚二甲基硅氧烷纳米层都相继沉积在单根聚酯纤维表层。
2.2 还原氧化石墨烯/聚二甲基硅氧烷改性非织造布的结构表征

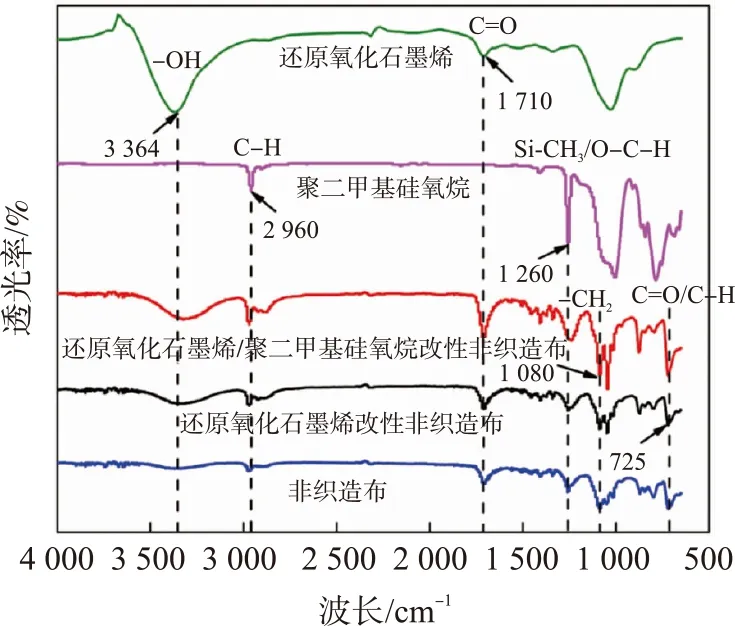
图2 非织造布、还原氧化石墨烯改性非织造布、还原氧化石墨烯/聚二甲基硅氧烷改性非织造布、还原氧化石墨烯以及聚二甲基硅氧烷的红外光谱图
同时,为了探究还原氧化石墨烯和聚二甲基硅氧烷对非织造布导电性的影响,采取三种不同浓度(2%,2.5%,3%)氧化石墨烯溶液浸泡非织造布,然后分别经聚二甲基硅氧烷塑封。不同改性非织造布的I-V曲线如图3所示。还原氧化石墨改性非织造布的I-V曲线斜率随氧化石墨烯溶液的浓度增加而增加,即导电性增强。经聚二甲基硅氧烷塑封后,还原氧化石墨烯/聚二甲基硅氧烷改性非织造布的I-V曲线斜率相对未塑封的样品略微有所下降,对导电性影响不大。
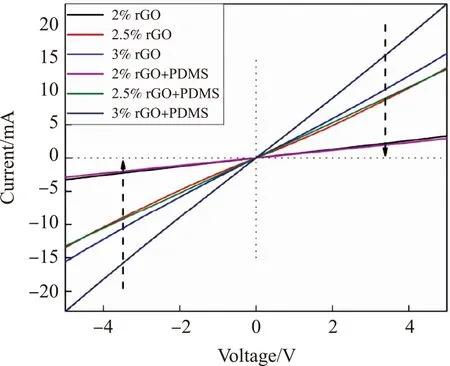
图3 不同浓度氧化石墨烯处理后非织造布的I-V曲线
3 传感器性能测试
3.1 响应时间
为测试该传感器的响应时间,将一个螺母(质量:0.064 1 g)放在传感器上一段时间,然后取下,观察其电阻相对变化率-时间曲线的变化,如图4所示,左右插图分别为放置和去下螺母时曲线放大图,中间为实物测试图。当轻轻放置螺母时,电阻相对变化率在240 ms的时间内迅速增加到0.4%,并在一定漂移范围内保持稳定,取下螺母时,电阻相对变化率在 120 ms 的时间内迅速回复至0%,并在一段时间内保持稳定。表明该传感器具有良好的响应度。
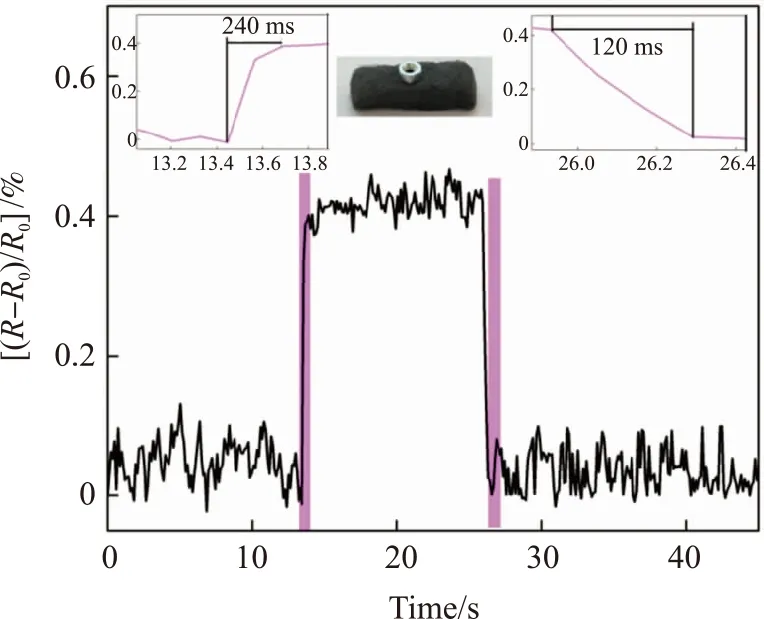
图4 传感器的响应时间
3.2 迟滞性
传感器的迟滞性是指一个循环内,往返所产生的输入和输出曲线之间的不重合度。如公式所示:
γH=±(ΔHmax/yFS)×100%
(1)
ΔHmax=y2-y1
(2)
式中:ΔHmax是输入和输出曲线间纵坐标的最大差值,yFS是满量程即达最大压力时电阻相对变化率的值,y1是施加压力时电阻相对变化率的值,y2时释放压力时电阻相对变化率的值。如图5所示,施加压力和释放压力时曲线纵坐标存在最大差值,将此最大差值通过式(1)和(2)计算,可以得出该传感器的迟滞度为6.83%
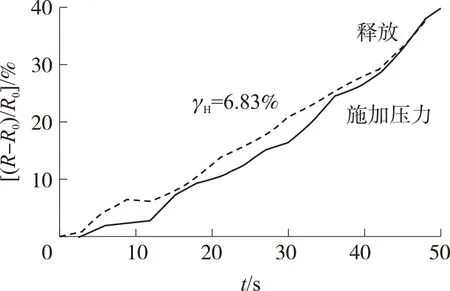
图5 传感器的迟滞性
3.3 灵敏度
灵敏度是表征传感器性能的一个重要参数。采用拉力测力器对传感器的灵敏度进行测试。从图6可以看出,外界施加压力为0~16 kPa左右时,传感器的灵敏度高达35.37 kPa-1,当外界压力为16 kPa~42 kPa 时,传感器的灵敏度为0.574 kPa-1,灵敏度数值相对其他传感器而言较高。
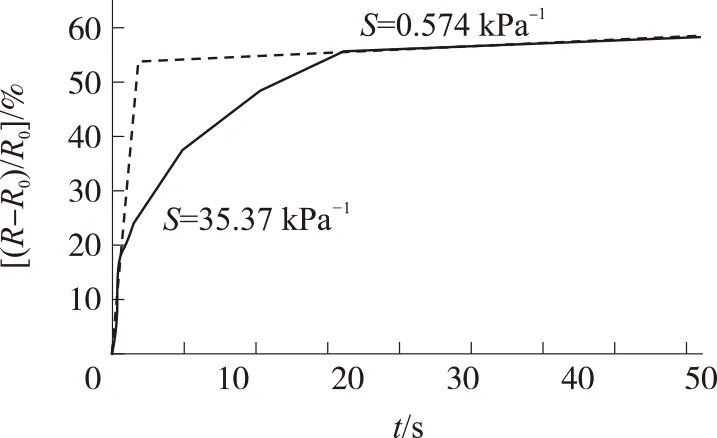
图6 传感器的灵敏度
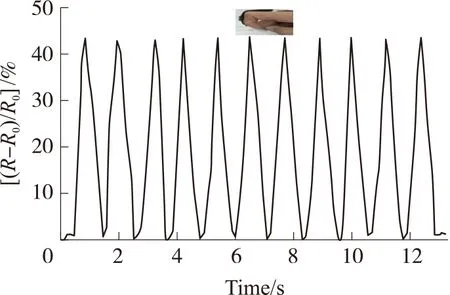
图7 手指弯曲的电阻相对变化率-时间曲线
3.4 传感应用
由于聚二甲基硅氧烷具有良好的生物亲和性,所以该传感器可以佩戴于人体各个部位(例如,手指,喉咙)以检测人体的生理活动变化情况。
将传感器两头端电极用医用胶带粘附于食指关节处以检测手指弯曲运动情况。如图7所示,当手指弯曲成90°时,电阻相对变化率增加至44%,当手指恢复伸直状态时,电阻相对变化率下降至0%。并且,多次进行相同测试获得的曲线形状及峰值基本保持一致。表明该传感器不仅可以感应到人体关节的运动情况,并且还具有良好的稳定性。
将传感器两端电极用医用胶带粘附于受测者喉咙处,通过反复咀嚼、喉部反复上下运动测得电阻相对变化率-时间曲线,如图8所示。当受测者进行咀嚼时,喉咙发生上下移动,此时,传感器的电阻相对变化率发生明显变化,上升至20%左右,表明该传感器可以用于喉部运动的检测。
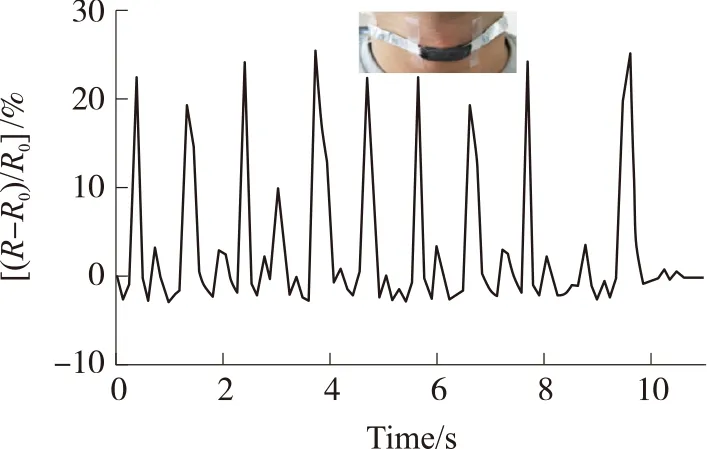
图8 咀嚼时电阻相对变化率-时间曲线
4 结论
总之,我们介绍了一种基于聚酯非织造布、还原氧化石墨烯和聚二甲基硅氧烷的新型柔性、耐久压阻传感器,并且对三维网络结构的柔性基材的优点进行了比较分析。作为具有三维网状结构的压阻式压力传感器,该传感器具有高灵敏度和耐久性,提供了理想的压缩变形。该传感器可以用来监测人体不同部位的生理活动,当手指弯曲至90°时,相对电阻变化率的值与时间成正比。此外,该传感器还可以准确地检测人体的呼吸和脉搏。因此,我们认为该传感器的制备材料和方法可以扩展到其他性能的传感器上以增强其性能,如人机界面、柔性机器人和生物电子方面。
