空间碎片接近及捕获技术地面试验调研研究
2018-10-17李扬张烽焉宁唐庆博童科伟
李扬,张烽,焉宁,唐庆博,童科伟
(中国运载火箭技术研究院研究发展中心,北京100076)
1 引言
空间碎片主要包括运载火箭末级或上面级、废弃卫星及飞行器爆炸或碰撞后产生的碎片,这些空间碎片占据了宝贵的轨道资源,不仅造成了资源浪费,而且严重影响在轨卫星的生存。空间碎片的在轨接近、捕获与清除技术,是目前国内外的研究热点和航天领域未来的重要发展方向,是中国从航天大国向航天强国转变所必须掌握的核心技术。
随着近些年计算机技术、机器人技术和传感技术的迅猛发展,以航天器在轨维护、废弃航天器清理等为目的的空间目标捕获技术已成为了空间领域的热点研究方向,而地面仿真验证技术则是解决上述问题并开展工程应用的前提。地面仿真实验平台可以为空间碎片接近及捕获过程中的关键技术,如航天器相对目标的高精度姿态跟踪、超近距离强迫伴飞的控制技术、机械臂抓捕翻滚目标过程中的跟踪控制技术、机械臂捕获非合作目标运动规划技术等空间的实际应用提供技术验证手段,验证在模拟环境下航天器接近及捕获控制理论与方法的工程可行性,为未来空间任务应用提供技术基础。
2 研究现状与发展动态分析
世界很多航天大国都在集中精力研制空间操纵飞行器,实现对空间目标的接近及捕获任务,并且已经取得了大量的成果,美国、加拿大、日本及德国等欧洲国家的空间机器人研究均处于世界领先水平。与此同时,为了提升空间任务的可靠性,通过在地面搭建模拟平台,模拟空间目标运动状况并验证其相关的关键技术。下面针对典型的空间碎片接近及捕获操作任务的关键技术突破验证需求,调研和分析相应的地面试验。
2.1 空间环境与目标特性仿真
MD Robotics(MDR)公司研制的空间视觉测试平台包括两个六自由度工业机械臂,如图1。一个机械臂用于支撑缩比复制的卫星模型,另一个末端执行器上带有相机可以用于探测。通过跨尺度等效实现视觉信息的模拟,在地面近距离尺度下验证空间停靠接近技术。该平台建立在空间暗室中,可模拟目标光学特性以及目标运动特性,通过编程操作可实现基于视觉系统的闭环控制验证。对于目标的姿态识别更新速率在中距离(1.2~5m)可达到2Hz,在近距离 (小于1.5m)可达到12Hz[1],但该视觉测试平台难以满足空间翻滚目标的在线估计与测量需求。

图1 MDR视觉测试平台示意图Fig.1 Schematic diagram of MDR visual testing platform
同步位置保持重定向试验卫星平台 (SPHERES)项目研制了空间自由翻滚运动的目标模拟器,可在空间微重力环境下绕任意轴自由翻滚。该项目在国际空间站上进行了一系列的试验和技术演示验证,使用 “通用目标检测的视觉估计和相对跟踪”(VERTIGO)计算机基于 “同步定位与地图构建算法”(SLAM)算法验证了空间翻滚目标三维重建技术、旋转特征轴检测与测量技术等[2-4],该项目依托空间站的微重力环境完成了翻滚目标探测识别技术验证,但相比地面试验的成本要昂贵许多。
2.2 绕飞停靠与跨尺度等效技术
2007年,美国国防高级研究计划局 (DARPA)的 “近期能演示验证的空间机器人技术”(FREND)成功进行了2次地面演示试验[5-7]。FREND最大特点在于能抓捕大部分的空间非合作目标,并为其提供位置保持、姿态控制、轨道修正、离轨、碎片清理等操作,其地面试验由美国海军研究实验室 (NRL)负责。
NRL研究人员利用接近操作试验设施,在不同的光照条件和变角速率 (0.1~1°/s)情况下,进行了一系列的自主交会和抓捕试验,对 “通用轨道修正航天器”(SUMO)计划的机器视觉、机器人技术、自主控制算法的集成系统进行演示验证。尽管在实验室环境下可以对分系统进行演示验证,但无法完全复制空间的微重力环境和光照条件。接触动力学、太阳光照和自主操作是SUMO面临的三个基本问题,需要进行飞行演示验证。

图2 SPHERE项目地面试验验证及在空间站技术验证Fig.2 SPHERE ground test demonstration and space station technical demonstration

图3 暗室内LED灯打开和实验室开灯的状态Fig.3 Situations with LED on in darkroom and light on in laboratory

图4 NRL的接近操作试验设施Fig.4 NRL approach operation test facility
NRL实验室建立的系统仿真实验台,该试验台能够试验全系统动力学仿真,包括传感器及光照条件,实现 “软件在回路中”的仿真并完成点到点的场景验证。
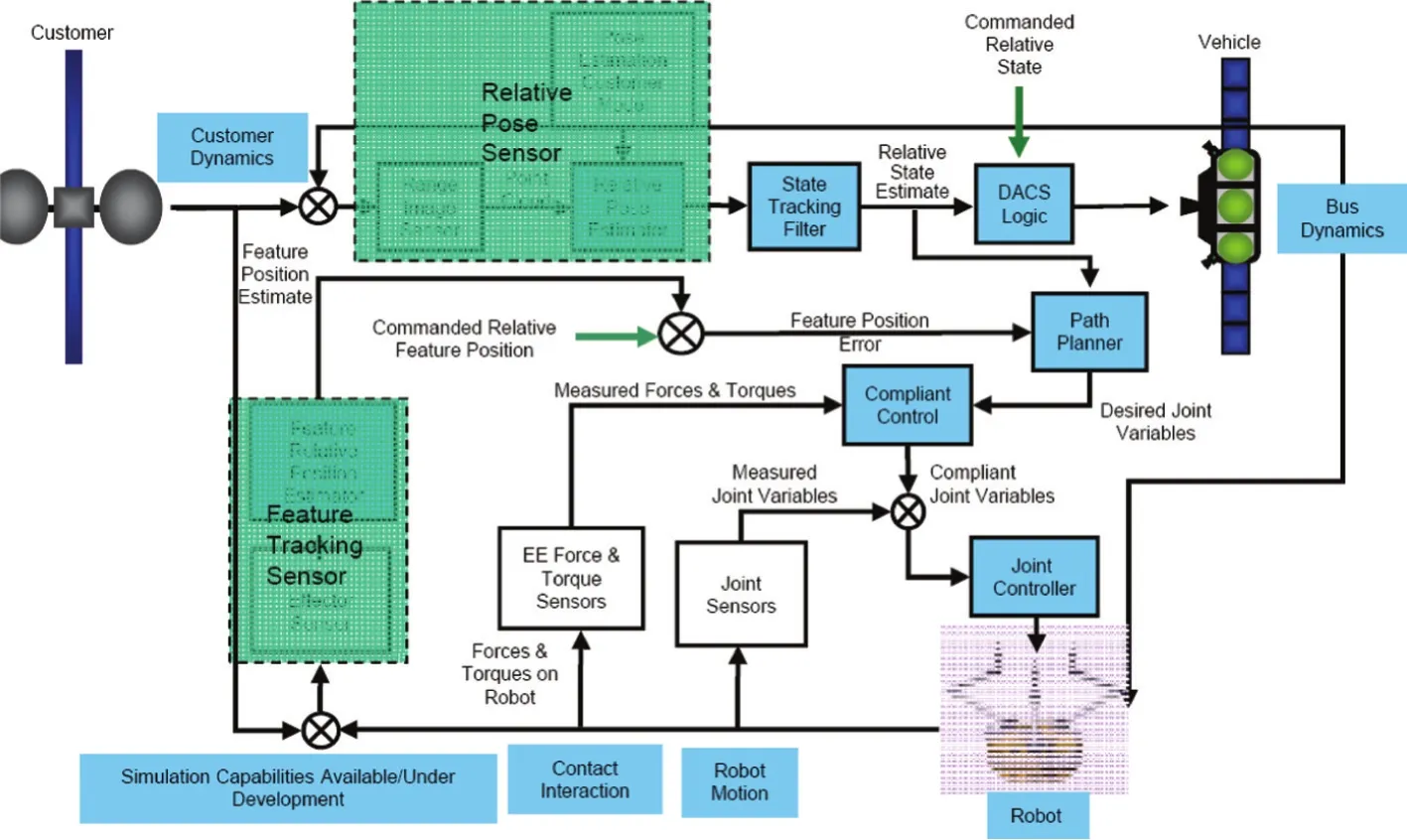
图5 系统仿真实验台Fig.5 System simulation testbed
2.3 捕获策略研究与组合体控制
德国宇航中心 (DLR)的空间系统演示验证技术卫星 (TECSAS)项目旨在通过进行远距离机动、近距离接近、绕飞监测、与目标星编队飞行、捕获目标星、组合体稳定调姿与轨道机动、地面遥操作验证主动控制和被动控制以及组合体离轨操作等[8,9]。于2006年之后开展的名为 “德国在轨服务任务”(DEOS)的计划,重点对LEO轨道非合作目标的交会、捕获和离轨等技术进行了研究。
随后DLR与ROBOTIQ公司联合研制了基于KUKA机械臂搭建的地面试验系统,用于验证对空间翻滚目标的捕获与稳定控制技术。该平台通过两套机械臂分别模拟服务飞行器和目标飞行器的六自由度运动,包括模拟空间慢旋目标运动、捕获过程中的碰撞动力学与组合体控制等。通过一套额外的机械臂验证捕获策略,将空间慢旋目标捕获中应用的关键技术有机集成与验证。
另外,FREND项目和其它类似系统的最主要区别就在于能够捕获非合作目标。被捕获的目标航天器在设计时无需增加任何专门用于对接的接口和装置。选取一般卫星上都有的星箭对接环、喷管或设备安装螺钉等结构特征作为非合作目标的捕捉点。在地面气浮平台上对接近停靠与捕获技术进行验证,通过引入力传感器信息验证柔顺控制技术及捕获策略对结果的影响。
师:同学们我们再来看,文章写了花开的四种形态来表现广玉兰旺盛的生命力,这四句话为我们展现了一幅幅生动的画面。听老师读,你们好好体会画面感,待会交流你的所见。

图6 DLR虚实结合半物理仿真试验Fig.6 Virtually-really combined semi-physical simulation test

图7 DLR地面模拟对接环捕获试验Fig.7 DLR ground simulation test for docking ring capture
美国 “轨道快车” (Orbital Express)项目研究人员在地面开展了充分的仿真和验证工作[10-13],从而保障在轨试验的顺利开展,图8和图9为 “轨道快车”项目地面对接试验情况。
2.4 机械臂柔顺控制技术
SUMO/FREND通过主动柔顺控制算法,利用安装在末端执行器下部的力/力矩传感器输入,反馈至关节电机使得末端执行器位置指令与作用于目标的力进行折中调整。SUMO采用阻抗控制器用于实现柔顺控制,它使得末端执行器能够对“弹簧-质量-阻尼”系统的动力学进行仿真。通过不同的系统参数调整,末端执行器能够以任一自由度形式反应。
NRL实验室的重力偏置实验台 (GOT)。该实验台为3自由度低摩擦气浮平台,基于该平台开展接触动力学的高逼真度模拟,用于验证机械臂柔顺控制算法及相关传感器、末端执行器硬件设计、抓捕控制软件以及抓捕相关子系统的集成能力。
图8 “轨道快车”项目机械臂Fig.8 Orbital Express robot arm

图9 “轨道快车”项目地面对接试验Fig.9 Orbital Express ground docking test

图10 重力偏置柔顺控制实验台Fig.10 Gravity offset compliance control testbed
“实验服务卫星”(ESS)是德国宇航中心于1994年左右提出的研究计划。该计划主要针对早期发射的TV-Sat-1卫星故障 (入轨后未能打开太阳帆板中的一块)进行维修。该计划研究了在视觉提供场景信息下,地面端控制抓捕工具接近目标卫星远地点发动机喷嘴并插入后进行捕获研究。
结合ESS计划,DLR设计了2套六自由度机械臂的卫星服务系统地面实验平台。机械臂采用工业机器人结构,具有较高的位置精度,手爪位置安装有力矩和位置传感器,可完成航天器的对接和抓取等实验。随后DLR与ROBOTIQ联合研制了基于KUKA机械臂搭建的地面试验系统,用于验证对空间翻滚目标的捕获与稳定控制技术。

图11 DLR地面模拟喷管捕获试验Fig.11 DLR ground simulation test for nozzle capture

图12 ESS抓捕目标卫星远地点发动机Fig.12 ESS captured target satellite's apogee motor
2.5 飞行试验及验证情况
日本在1997年发射的ETS-VII进行了空间自主交会对接和机械臂操作关键技术验证,成为最早成功演示验证自主在轨捕获技术的空间飞行器系统[14-16]。ETS-VII系统安装了一套六自由度的2m空间机械臂和一套五自由度的0.7m空间机械臂,在地面开展了大量的试验工作,从而保障在轨试验的顺利开展。ETS-VII入轨后成功实现了追踪星对目标星的多次交会对接试验和最终在轨捕获试验,完成了在轨性能评估、机械臂与飞行基座的协调控制、大时延下机械手遥操作、在轨服务等一系列演示验证试验。在轨演示期间进行了两次重要的漂浮目标抓捕试验,验证了自主在轨捕获相关的自主交会、在轨视觉伺服、机械臂控制、大时延下的遥操作等多项关键技术。
1999年11月,DARPA的 “轨道快车”通过飞行试验验证了服务星 “自主空间运输机器人操作”(ASTRO)与目标星 “下一代卫星”(NEXTSat)之间的自主对接、接近、捕获和交会能力。“轨道快车”是继ETS-VII之后第二个开展在轨飞行演示验证的智能空间机器人系统。“轨道快车”具备轨道机动能力强等特点,ASTRO在天基目标测量系统的导引下,首先完成对NEXTSat交会逼近,然后通过自身携带的空间机械手系统,对NEXTSat实施在轨抓捕。这是首次使用具有闭环视觉伺服系统和自动故障恢复功能的机械臂全自主地捕获自由漂浮目标,首次在捕获过程中使用了基于被动探测系统的全自主导航与制导技术。
日本ETS-VII与美国轨道快车均开展了在轨飞行试验验证,完成了合作且姿态稳定目标的捕获技术验证;SPHERES项目在国际空间站上进行了一系列视觉探测与识别技术验证。美国凤凰计划[17-19]、欧洲DEOS计划虽然均为面向空间翻滚目标的捕获任务,但均处于关键技术的地面试验验证阶段,尚未开展在轨飞行,因此开展空间翻滚目标捕获过程中的航天器控制理论与方法地面试验验证与飞行试验的需求迫切。
3 发展趋势分析
通过对国外航天器控制方法的地面及空间试验验证发展现状调研和分析,可以看出空间目标捕获过程中的航天器控制理论与方法地面试验验证有以下发展趋势:
(1)随着动力学建模技术不断提高,空间飞行器的运动学与动力学建模更加精细化,使地面仿真的真实度和可信度随之提高。但仍存在诸多物理约束与物理属性尚未以数学形式描述并集成在仿真模型中,存在天地一致性的差异,因此应持续提升数学模拟的逼真程度,不断逼近真实空间环境;
(2)近年来地面仿真平台性能逐步提高,增强了地面试验复杂模拟及可视化程度。但对于复杂空间目标交互控制试验仍存在着难以多尺度模拟的问题,因此研究团队需要在多尺度模拟与地面试验复杂度之间进行折中,在地面试验允许条件下实现两者兼顾的仿真平台;
(3)通过建设功能完善的地面试验平台不断验证突破新理论、新方法与新策略,提升天地一致性,加强面向空间翻滚目标捕获任务的技术储备。地面试验终究不能完全替代空间试验,各国也在适时开展飞行演示验证对空间碎片接近及捕获技术进行进一步验证。
4 后续发展设想
通过对各国空间碎片接近与捕获技术试验情况的发展现状分析可知,面向空间合作目标捕获的相关研究起步较早,多个国家已经完成在轨技术验证和应用,技术较为成熟。与此同时,面向空间翻滚目标捕获的研究地面验证手段较为全面,但尚未开展在轨试验。未来仍急需加强针对空间翻滚目标捕获的理论创新、技术研究与空间实验验证,其研究成果可为空间翻滚目标的捕获的实际应用提供重要的技术基础,具有重要的理论意义和工程应用价值。
结合空间碎片接近及捕获所需关键技术,对地面大型试验的后续发展设想如下:
(1)大跨度六自由度地面半物理仿真验证平台。建立大跨度六自由度地面半物理仿真验证平台,解决空间微重力环境下空间对抗相对位姿大尺度六自由度目标视觉导引、自主交会和捕获、高精度接近及悬停控制、接触动力学等试验问题,满足全尺寸验证需求。
(2)光电动力学一体化系统仿真验证平台。开发光电动力学一体化系统仿真验证平台,解决包含空间热环境、光学环境、电子信息、耦合动力学等综合天地一致性模拟试验问题,如空间目标运动/光学特性模拟、遥操作组装、软硬件在回路测试等。
(3)虚实结合的多尺度地面验证试验等效。开发基于虚实结合的多尺度地面试验验证平台,解决跨时间/空间尺度等多尺度地面试验验证问题,如交会接近速度/距离大跨度、超近距离跟踪大质量翻滚目标、多视觉探测及态势感知、可视化虚拟场景等。
