一种基于LMI的鲁棒PID控制回路优化及工业应用
2018-10-15李海霞
李海霞
(兰州石化职业技术学院,甘肃 兰州 730060)
在连续性过程控制中,PID控制器的性能好坏关系到生产的稳定性、有效性和经济性。根据当时工业条件设计合理的控制器,一般可达到控制要求。但工业条件随着外界因素或负荷变化而改变,使得之前设计好的控制性能下降。为此,对控制回路的运行情况进行监测,及时准确判断控制器性能变化,并设计具有鲁棒性能的控制器成为改善控制性能的有效方法。工业控制系统由基本控制回路组成,回路合理投运成为整套装置平稳生产的必备条件,因此针对控制回路的控制优化成为工业研究的热点。本文面向工业的实际过程,开发了一个基于LMI(Linear Matrix Inequalities,线性矩阵不等式)的鲁棒PID控制回路优化系统。在中石化的实际项目的成功应用,表明该算法设计有效性以及良好工程意义。
1 算法设计
PID控制回路参数优化的思路为:采集控制回路相关数据进行过程模型辨识,离线仿真并进行LQG(Linear Quadratic Gaussian,线性二次高斯)控制器性能评价,在此基础上设计鲁棒PID控制器,最后投入实际运行。把控制器性能评价和鲁棒PID设计问题都转化为LMI形式求解,使得辨识所得模型参数在所设范围变化时,控制器仍然能够保持在良好的工作状态。
1.1 过程模型辨识
最小二乘方法可获得一定精度的模型,计算量小,有时会比其它方法易得到结果。根据文献的方法,设对象模型为:,可辨识出:K,a,b,tao这些参数。
1.2 闭环系统形成
(1)考虑一类工业被控对象,其传递函数为:

其 中, 参 数bj∈R,j =0,1,2,…m 。ai∈R,i =0,1,2,…n是 未 知 的, 但 可 表 示 成形 式,为为参数的标称值,为a的变化范围。对i纯滞后因子e−τs,采用k阶pade 近似将其展开为。被控对象的能控标准型描述为:

其中,xp(t )为状态向量;u(t )为控制向量;Ap,Bp常数矩阵。

(2)PID控制器的形式可以表达为:

其中,Kp,KI,KD分别为比例,积分以及微分系数。令,则有:


由不确定系统(2)与控制器(4)可以组成一个闭环系统,如下:

其中,x(t )为状态向量;u(t)为控制向量,且不受约束;A、B 为常数矩阵。
企业管理层需要提高自己创新意识,这样才能更好的使企业在科技创新的道路上长远发展。这需要企业内部审计从内部规划企业的发展道路,管理和约束管理部门的发展以及改革,在科技创新政策的实施的同时,保证企业管理层面的决策实施能力,降低企业内部在这个过程中的风险。审计部门需要对企业的整体有个全面的了解以及掌握,弄清发展的关键以及缺陷,从管理部门为基础,改进提高企业的创新程度,在物力、人力以及财力等方面给予企业发展所需的资源配置。另外,审计部门需要了解国家颁布的各类实施政策,在国家的支持下走企业科技创新的发展改革道路,在这个过程中,企业也需要重视审计部门发现的各类问题,及时总结经验教训进行解决。
1.3 控制器性能评价
一般典型的过程工业是长周期运行的形式,以方差等指标能更加符合系统的实际性能。LQG性能评价指标定义为:。随着λ的变化,可到的一系列不同的控制律,及闭环系统(5)的输出,输入方差,从而可得到一条trade-off曲线,也就是控制器性能下线,离曲线越近性能越好。可采用量化指标:,为最佳性能指标,为当前控制系统性能指标。η≤1,其值与1越接近,表明控制器性能越好。优化该指标可通过LMI的方法解出,即:
如果∃X>0,W>0,λ>0使得如下优化问题
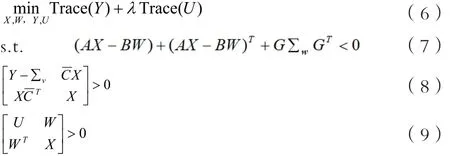
有解,且W=KCX ,满足状态协方差∑x<X,从而进行控制器性能评价。
1.3 控制器性设计
具有控制作用约束的二次型性能指标,综合考虑了系统的信息,指标为:

Q为与x(t )维数一致的常数矩阵;u(t)为系统的控制向量,且不受约束;R与u(t )维数一致的常数矩阵,R>0。
针对不确定系统(2),在需要优化的指标(10)下,设计一个PID控制器(4),使得(4)与(2)所组成闭环的系统(5)是稳定的,且满足性能的一个上界J≤J∗。转化为以下优化问题:对不确定系统(5)和性能指标(10),如果存在一个常数ε,对称且正定的矩阵,矩阵T和S,使得以下的优化问题:

2 控制回路优化
在当前控制器投运一段时间并达到稳态之后,采集常规实时操作数据,辨识当前模型,并由(6)~(9)求解最佳性能指标JLQG;计算性能指标η,若其接近1则表明系统性能已接近最优,无需更改控制器设置,否则由(11)~(13)中所得控制器参数重新设计控制器,并投入运行。
3 工业应用
针对某连续重整装置的一个温度回路进行辨识,得到的一阶纯滞后的模型为。在优化实施前后,回路PID参数如表1所示。
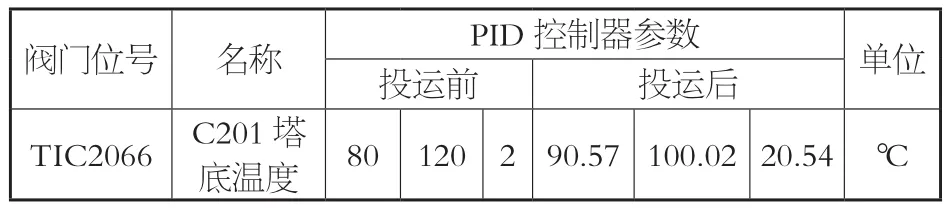
表1 连续重整装置回路参数
控制回路优化前后实时响应趋势图如图1、2、3、4所示。
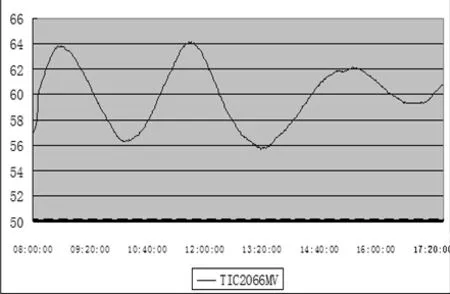
图1 投运前TIC2066回路被控输入响应

图2 投运前TIC2066回路被控输出响应

图3 投运后TIC2066回路被控输入响应
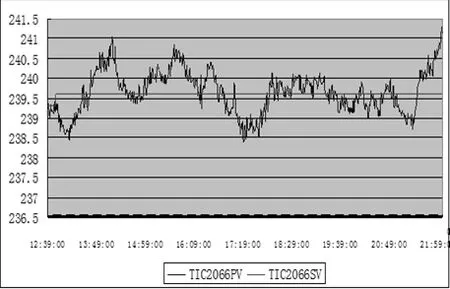
图4 投运后TIC2066回路被控输出响应
利用先进控制实施前后的控制回路中的实施数据,运用LQG评价准则,对部分回路的性能进行比较,见表2。

表2 连续重整装置回路性能

通过各回路优化前后的性能比较、分析,看出基于LMI所设计的鲁棒PID控制器比普通PID控制的综合性能强。同时,LQG性能评价中,对工业实际操作中的控制阀的作用对控制性能的影响得到合理的分析。
4 结语
本文开发了一个集系统辨识、控制器性能评价及其参数优化的工业控制回路优化系统。该设计以先进控制的算法为基础,通过Matlab实现了理论算法的研究,为工业应用提供了便利条件。将该软件应用到中石化的实际项目之中,取得到了良好的控制成效,不仅使得该装置运行平稳,而且提高了操作人员对工业回路的调节工作效率,从而改善了控制系统控制性能,鲁棒性能显著。