基于坐标变换的交互多模型车载定位研究*
2018-10-13焦雨琪
焦雨琪,牛 蕊,夏 志
(南京邮电大学 通信与信息工程学院,江苏 南京 210003)
0 引言
随着汽车的使用量增多以及道路越来越复杂,人们对于车辆定位导航精度的要求也越来越高[1]。如今二维平面的车辆导航可以满足基本的定位需求,但是三维平面内的定位精度还不够,尤其是高度定位,在遇到复杂的三维场景时,经常不能判断车辆在哪一层,从而出现导航信息匹配实际路线错误的现象[2]。为了提高车辆的定位精度,考虑对GPS数据进行滤波处理[3],在现实条件下,实际的系统总是非线性的,此时对比标准卡尔曼滤波,无迹卡尔曼滤波更能表现出其优越性。为了解决车辆运动状态突然变化时定位效果不佳的现象,采用交互多模型算法,使其具有自适应滤波功能。坐标变换算法将建立平面和斜坡两个不同的坐标系,通过两个坐标系X、Y、Z三轴之间的联系求出平面坐标系中车辆的高度数据。
1 无迹卡尔曼滤波
卡尔曼滤波是一种动态估计算法,通过状态方程和观测方程实现“观测-更新”这一动态传递过程[4]。
考虑如下的非线性系统:
Xk=f(Xk-1,k-1)+Γ(Xk-1,k-1)Wk-1
(1)
Zk=h(Xk,k)+Vk
(2)
其中,Xk是系统的状态向量;f(·)是非线性的过程函数;Zk是观测向量;h(·)是观测的非线性函数;Wk-1、Vk是零均值白噪声序列。
无迹卡尔曼滤波首先对该系统状态向量进行U变换,再对变换后的状态向量进行滤波处理[5]。过程如下:
(1)计算Sigma点:

(3)
其中 ,n为状态向量维数,Pk-1为误差协方差矩阵。
(2)将Sigma点经过f(·)和h(·)非线性变换后再求和可以得到状态更新量和观测更新量Xk,k-1和Zk,k-1。
需要注意,U变换只是选取少量确定的Sigma点,不是随机地从给定分布中进行采样。
2 交互多模型
在现实生活中运动目标往往是机动的,单凭一种运动模型远远不能描述车辆的运动状态[6]。在目标跟踪的过程中采用多个运动模型,各个模型之间的转移服从马尔可夫链。
车辆的运动模型分为两大类:CV模型和CA模型。CV模型描述的是速度不变的直线运动,此时只需要考虑车辆的位置和速度。CA模型描述的是车辆加速度不变的直线运动,此时需要考虑车辆的位置、速度和加速度[7]。
CV模型的状态向量可为:
CA模型的状态向量可为:
其中,XX、XY、XZ分别为X轴、Y轴、Z轴的位置信息,VX、VY、VZ分别为X轴、Y轴、Z轴的速度信息,AX、AY、AZ分别为X轴、Y轴、Z轴的加速度信息。
观测向量为:

其中,Sx表示X轴方向的位置信息,Sy表示Y轴方向的位置信息,Sz表示Z轴方向的位置信息,ΔS表示测量时间内车辆位移的路程信息。以上信息可由GPS信息和里程计信息获得。一般来说,观测向量维数必须小于或等于状态向量的维数。
3 交互多模型卡尔曼滤波
交互多模型使用不同的模型对应不同的运动状态,首先输入交互,在各个模型切换时通过转移概率来控制,每个模型并行滤波,再融合各个模型的概率输出最终的状态估计[8]。
3.1 输入交互
假设模型i到模型j的转移概率为Pij,每个滤波器的模型概率为μj(k-1)。
模型i到j的混合概率为:
(4)
其中归一化常数:
(5)
模型j的混合状态估计:
(6)
模型j的混合协方差估计:
(7)
将混合状态估计作为滤波输入的初始状态。
3.2 并行滤波

量测更新得到k时刻的状态值和协方差矩阵:
(8)
(9)
(10)
其中,Z(k)为观测量。
3.3 更新概率模型
模型j的似然函数:
(11)
其中:
vj=Z(k)-Zj(k/k-1)
(12)

(13)
更新后模型j的概率为:
(14)
其中,c为归一化常数:
(15)
3.4 输出交互
最终k时刻的总状态估计:
(16)
k时刻总的协方差估计:
(17)
从以上步骤可以看出滤波的结果是多个模型加权后的模型,不同时刻选取概率最大的模型来描述此时的运动状态。
4 坐标变换
车辆在平地上是二维空间,到了坡面,对于全局坐标来说还是三维,但是对于坡面坐标系来说就是二维,高度为零[9]。坐标变换是对空间实体的位置描述,是从一种坐标系变换到另一种坐标系,通过两个坐标系之间的对应关系来实现。任何维的旋转可以表述为向量与合适尺寸的方阵的乘积。最终一个旋转等价于在另一个不同坐标系下对点位置的重新表述[10],如图1所示。

图1 坐标系S和坐标系S1示意图
如图1坐标系S、S1所示,φ为方向角,θ为仰角,取坐标系S为全局直角坐标系,r=xex+yey+zez为S1坐标系上某个动点坐标值。
令rd1=xd1ex+yd1ey+zd1ez为平面M1上的已知点,该平面法向矢量设为n1=cosθsinφex-cosθcosφey+sinθez,其中ex、ey、ez为S坐标系的坐标轴单位矢量。则M1平面上与S坐标原点最小距离为n1·rd1,该点称为ro1点,平面方程为(r-rd1)·n1。
取坐标系S1的原点为ro1=(n1·rd1)n1,坐标轴Z1取为平面法向量n1,X1轴和Y1轴在M1平面上。用S1表示的动点rs1与S表示的r的关系为r=ro1+rs1。
取X1轴为M1平面上的方位方向,Y1轴为仰角方向,则ez1=n1,ex1=(cosφ,sinφ,0),又因为ey1·ex1=0,ey1·ez1=0,故得:
ey1=(-sinθsinφ,sinθcosφ,cosθ)
(18)
(19)
当φ=0°时,
(20)
显然,z1=0即为S1坐标系的M1平面方程。由于x、y可由GPS得到,z1又为0,自然可以求出高度值z[11]。当高度位置信息求出之后,可以利用GIS定位到确定的一条车道上,避免出现车辆定位错误的现象[12]。
5 仿真实验及结果分析
仿真实验时,车辆在三维空间内做S型运动,方向角45°,坡度45°,初始位置位于(100,500,0)坐标处,初始速度为(0,10,0),经过直线匀速运动250滤波点之后,开始上坡进行变速S型运动。采样周期为0.1 s[13]。图2~图4为仿真结果图。
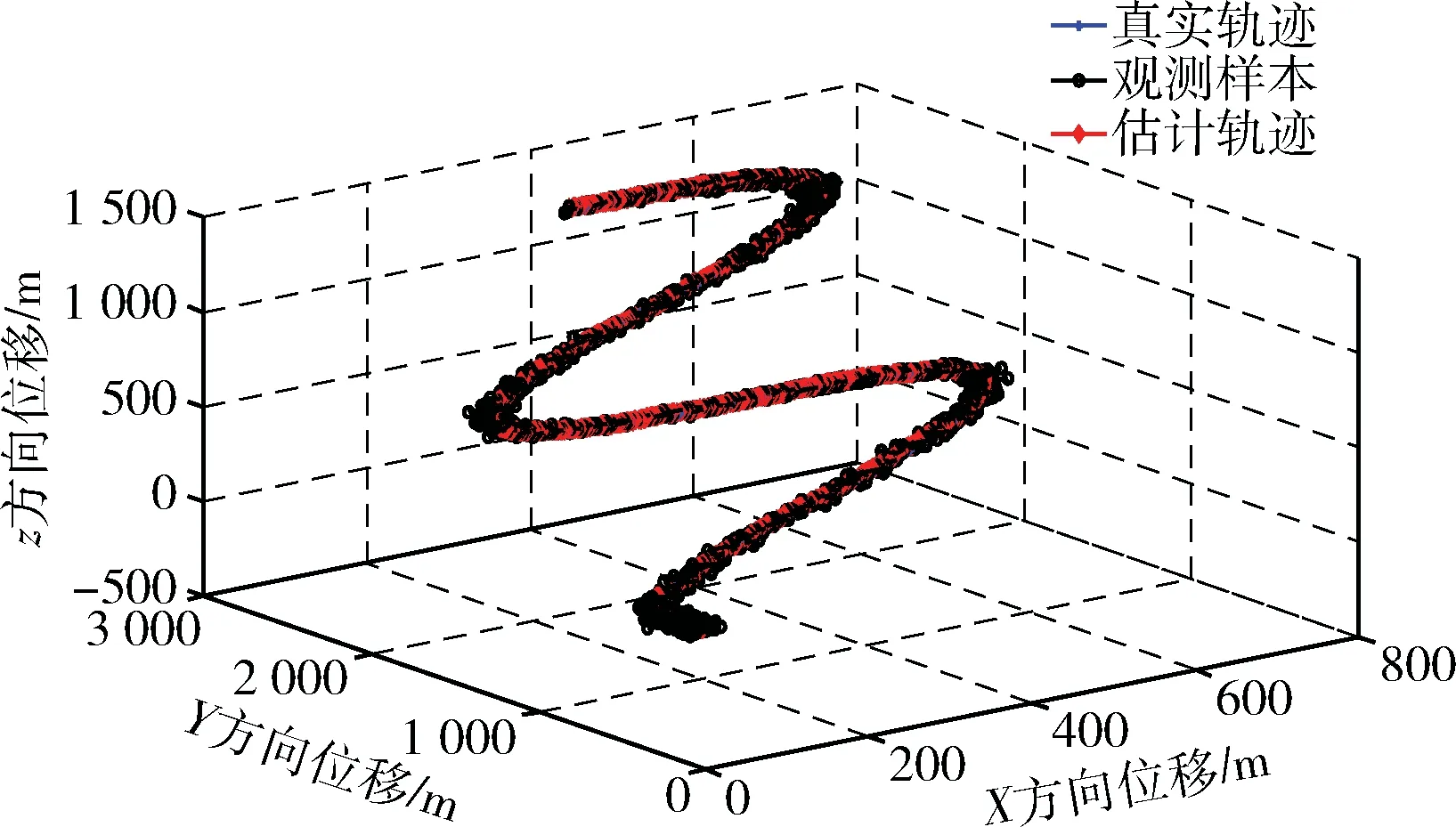
图2 基于坐标变换的IMMUKF车辆运动轨迹
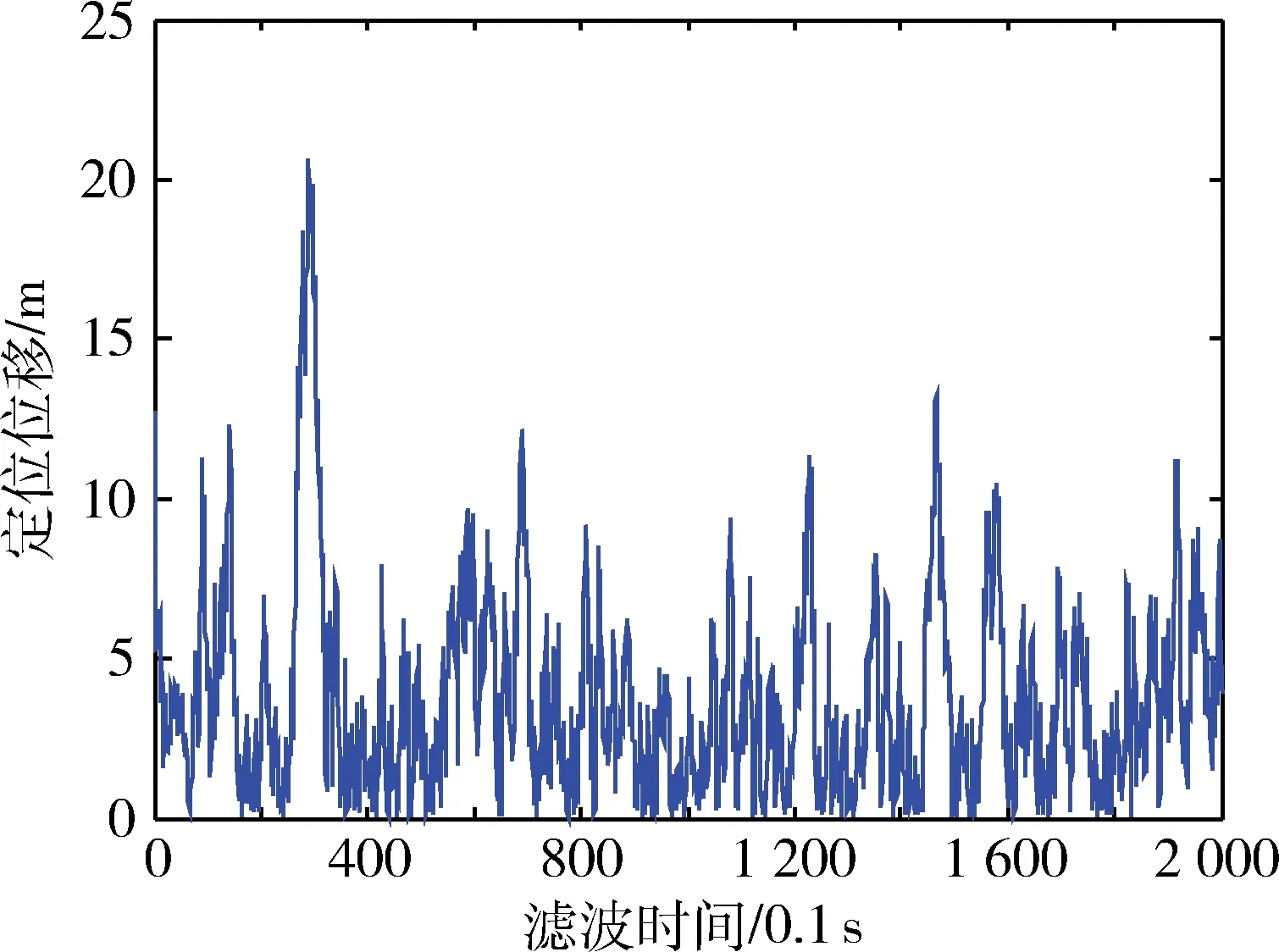
图3 基于IMMUKF-3D算法车辆运动Z轴方向定位误差

图4 基于坐标变换的IMMUKF车辆运动Z轴方向定位误差
表1和表2列出了4次仿真实验中高度误差和总误差数据。

表1 车载三维S型运动高度定位误差 (m)

表2 车载三维S型运动定位总误差 (m)
此实验由IMMUKF-3D算法和基于坐标变换的IMMUKF算法分别模拟三维空间内车辆上坡运动。由仿真实验结果图2可以看出车辆在斜坡上做S型拐弯运动,初始位于(100,500,0)坐标处,初始速度为(0,10,0),经过直线匀速运动250滤波点之后,开始上坡。采用交互多模型融合无迹卡尔曼滤波,在车辆运动状态出现突然加速或突然减速时能够及时调整模型概率,使车辆运动速度能够很好地追踪上标准速度。由图3、图4可以看出,基于IMMUKF-3D算法车辆运动Z轴方向定位误差与基于坐标变换的IMMUKF车辆运动Z轴方向定位误差相比,明显误差较大。图4由于前250滤波点时还在平地,坐标还未变换,因此无高度误差。通过表1和表2进一步分析仿真实验结果可以更加直观地发现,基于坐标变换的IMMUKF算法在高度定位精度和总体定位精度方面都有明显的提高。其能够区分车辆是在桥上还是桥下,减少由于高度定位误差较大而将车辆导航地图匹配出错的情况[14]。
从仿真结果可以发现基于坐标变换的IMMUKF算法在三维空间中可以有效减少高度定位误差,在车辆上坡的情况下可以减少车道匹配出错的情况,在一定程度上有效地提高了车辆的定位精度。
6 结束语
由于GPS提供的高度信息相比水平信息具有更高的误差,利用之前的IMMUKF-3D算法并不能完全解决高度定位精度不够的问题,导致车辆导航错误[15]。利用坐标变换的原理,将三维空间转化为坡面二维平面,通过三维坐标系的X轴、Y轴、Z轴与二维平面的X1轴、Y1轴之间的关系求出车辆高度信息。通过仿真实验结果可以直观发现,基于坐标变换的IMMUKF算法在高度定位精度和总体定位精度方面都有明显的提高。
