基于BIM快速生成高精度三维模型的方法研究及其应用探索
2018-10-13
(昆明理工大学交通工程学院,昆明 650500)
前言
现有的人工建模方法在快速发展的计算机领域已经日益暴露出来了弊端,而随着绿色建筑、智能建筑以及城市可持续发展概念的不断深化,现有的建模方式已经无法满足新时代模型的要求。传统的建模方法常常表现为人工作业量消耗大,经常出现加班画图并且出图效率偏低、出图慢、修改图纸程序繁琐等弊端,因此,如何进行精益画图,精细化管理,提高生产效率和扩大生产利润,是目前设计工程项目面临的主要问题,而BIM的出现解决了很多的问题。实景建模技术是BIM应用领域中近几年来发展最迅速的建模方法,现主要应用于场地规划、面积测量、土方量计算等,实景建模技术的出现是解决了以前需要耗费大量人、材、机才能解决的实际问题,但是如何建立快速、高精度、低成本的模型成为所有实景建模技术人员面临的最新问题,而实景建模技术能否为工程项目带来更长远的发展前景也是所有技术人员正在思考的问题。
1 传统实景建模方法的不足
现在主要的建模方法一共有三种,一是人工根据设计想法通过各种制图软件绘制出二维建筑模型,二是通过三维激光扫描技术提取物体表面的三维点云数据,然后形成被测物体的三维模型,三是通过倾斜摄影技术获取建筑物不同视角的影像数据,然后通过内业作业形成三维实景模型。三种方法中人工建模方法需要消耗大量的人力,耗费大量的时间翻模,而且这种建模方法的精确度往往已经和实际的建筑物有一些偏差,只能达到和图纸相同的程度并且效率很低。激光扫描技术能够达到高精度、快速呈现模型的效果,但是往往设备都是进口的,价格比较贵,小工程和小项目一般不会考虑出资购买设备。而利用无人机搭载相机的倾斜摄影技术建立三维实景模型是当下能够实现高精度、快速度、低成本的最优方法。
对于已有建筑物来说,如果按照图纸建模,不能够及时反映现有建筑物的实时状况,随着时间的推移,建筑物可能会因为长期受力原因而受到轻微的沉降或者变形; 人工建模不能直接反映建筑物的纹理,而需要后期获取纹理然后再添加上去; 大多数建筑物通常存在于繁华的城市里,周围有茂盛的绿化和繁华的街道,周围遮挡物过多三维激光扫描技术无法完整获取建筑物的全景表面数据。对于桥梁和隧道来说通常存在于郊区或野外地质条件很差的地方,或者是存在于城市交通连接处,恶劣的地质条件或者是复杂的交通状况使对于桥梁和隧道的建模难度加大了很多。隧道往往处在山岭或者是地下,而洞口处的模型至关重要,洞口处的位移沉降量不管是在施工过程中亦或者是在日后的监测与检测过程中都处于重中最重的地位。以上问题的出现,需要我们用一种可行的方案解决这些问题,我们现在可以利用无人机搭载相机对建筑物进行倾斜摄影拍摄,如果有无人机不能触及的地方可以采用和人工相机结合的方法,大大减少了人力、物力和所需经费。
2 利用倾斜摄影方法实现实景建模
实景建模技术是一种通过照片、视频和点云等数据形成模型的技术。对于真实场景建模系统,不仅需要数据采集,校正融合和处理建模,还需要后续的模型利用过程,与现有的传统建模方法相比,实景建模技术具有更长远的应用前景。主要体现在高效率,高效率又分为数据采集效率高,数据分析效率高,机械化建模效率高。实景建模技术借助于无人机搭载智能相机采用倾斜摄影技术采集数据,可以对现实场地的实时数据进行精细的采集、传输,而现在传统的数据采集是由测绘方进行数据采集,然后给甲方,甲方再交给施工方,这期间的数据可能就已经发生了变化,相比之下实景建模数据采集更具有时效性。实景建模技术主要是运用机械工具,可以大大地节省不必要的人工损耗,并且采集数据速度是人工难以匹及的。实景建模技术最终呈现的结果相当于一个虚拟的三维世界,将真实的世界投射到虚拟世界中,真实世界的光照发生变化,虚拟世界的光照也会发生变化,并且整个数据、尺寸等各种信息都可以直接在模型中提取、查询、更改,极大地方便了数据的处理及储存,由真实场景建模和数字模型组成的综合模型同时具有地理定位,高效的建模方法大大缩短了设计周期。
倾斜摄影技术是近几十年来迅速发展起来的一项高科技手段。是通过同时从不同的角度收集图像数据,使得从人眼获得的数据似乎进入了真正直观的世界。使用倾斜摄影可以通过相关软件直接显示高度,长度,面积,角度,坡度等的测量值,并可直接提取地面的空间位置、建筑结构、颜色和纹理等信息,是实现三维实景建模技术的重要手段[1]。
结合无人机和倾斜摄影技术是实现低成本和快速建立三维城市实景模型的有效方法。由于无人机飞行高度低,所拍摄的倾斜像片分辨率高,色彩更加接近人眼观测颜色,能够显著提高城市三维模型的真实感。本项目采用的飞行平台是DJI大疆PHANTOM4无人机航拍仪如图1。主要参数如表1所示。
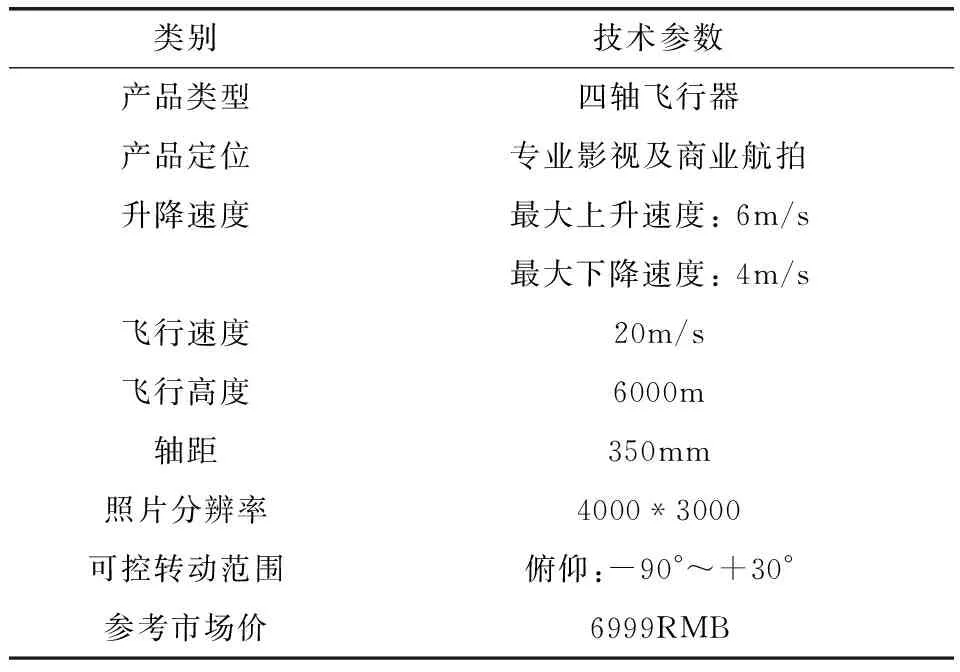
表1 无人机基本参数

图1 大疆精灵4飞行器
3 解决问题技术路线
(1)资料准备和实际现场勘查
提前与所拍摄建筑物相关负责人员进行沟通和交流,充分了解建筑物的历史发展,进行现场的初步勘查,了解到周围的结构设施,在最合适的地方进行起飞试验,利用周边现有设施为机械设备充电找到地方。
(2)确定飞行数据
选择合适的飞行平台,制定合适的飞行路线、飞行时间等,不同的场景对于拍摄要求着重点不一样,所以要进行提前试飞,做到能够完美的呈现模型。首先以建筑物为中心,以建筑物底部中点为中心点,向外做圆形包络线为无人机的飞行航线,使无人机以一定的速度和飞行角度以中心点为环绕中心进行环绕式航路飞行如图2,或者是将所需拍摄建筑物周围定四个点形成一个矩形范围,然后在建筑物上方进行反复直线式航路飞行,如图3所示。利用环绕式航路可以对建筑物进行多角度拍摄,可以减少拍摄盲区,比较适合于小场景的单体建筑物拍摄,利用反复直线式航路可以对场景进行宏观把握,尽可能的把所圈范围内的所有建筑物、车辆、绿化等都能显示出来,比较适合于大场景的拍摄[2]。
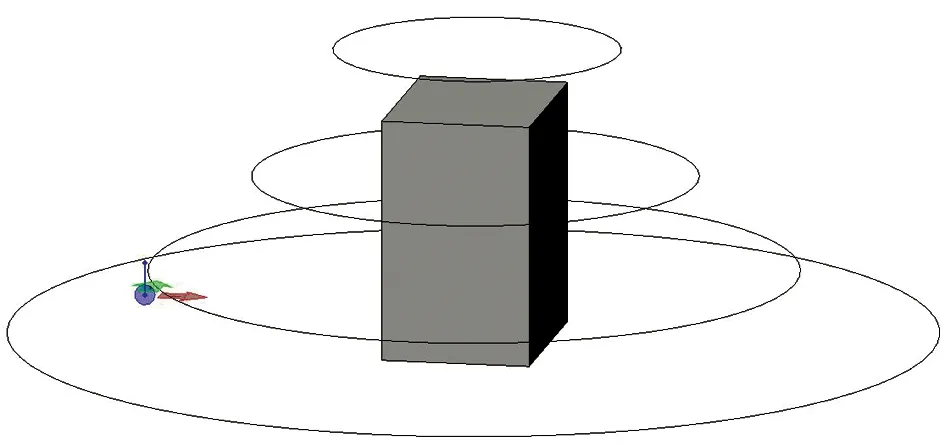
图2 环绕式飞行航路
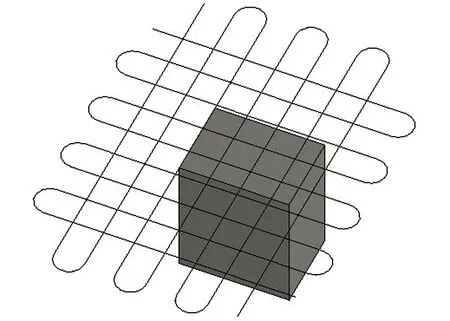
图3 直线式飞行航路
(3)数据采集
按照之前准备的飞行方案,对现场每一个建筑物进行飞行数据采集工作,由于现场的地域特征影响,无人机拍摄会遇到拍摄盲区,此时就需要借助人工利用相机补拍,将无人机不能捕捉到的地方进行细节拍摄,然后将两者采集到的数据进行融合,使之成为一个完整的整体建筑物。当进行数据采集时,如果影像的重叠度过低,会造成后期处理数据时质量差,而且生成的模型有破洞处,如果影像的重叠度过高,则会造成不必要的数据冗余,所以我们尽量将影像的重叠度控制在80%左右。
(4)数据处理
利用Context Capture软件对采集的数据进行处理,生成三维实景模型,然后再Microstation里面对生成的实景模型进行必要的修改。Context Capture提供的模型能够有精确的地理位置信息,无论是输入和输出,都支持多种数据格式。首先新建项目,将所采集的照片、点云等数据导入软件,导入照片数据后可以查看照片的信息,拍摄方式及来源,来源不同则照片的数据也不同,对于没有Rotation等信息的照片,系统就默认把这些放到一个数据盒子里。接着利用SFM运算原理进行空间三角测量Aerotriangulation,这个计算是通过照片计算其拍摄位置,进行影像密集匹配,生成密集点云。然后进行任务划分,当照片有了三维tin数据后,需要将他们进行任务划分。最后提交计算任务进行纹理映射,计算完毕后,系统会出现提示,点击3DView就可以查看生成的实景三维模型。
(5)其他用途
将生成的模型根据不同的需求保存为不同的格式,然后将模型导入所需要的软件中,可以实现景观设计、动画展示、施工模拟、施工监测与检测等全生命周期的各个阶段的用途。
4 BIM在实际项目中的应用
4.1 古建筑恢复
文庙是祭祀孔子的殿堂,是我国古代文化遗产中极其重要的组成部分,传承着中华文化的过去和未来。呈贡文庙位于呈贡老城东门街,现存建筑由南向北中轴线布局。有泮池,棂星门,东西两庑,大成殿等建筑,占地8.34亩。呈贡文庙历经数次损毁和重修,至今已有600多年历史,是昆明地区现存的文庙建筑中最早的一个。中华人民共和国成立以后,呈贡文庙一度成为行政机关办公场所,后因年久失修,长期闲置未用。现今被列为市级文物保护单位,国家要求修缮文庙。需恢复原状进行修复,我们所做的模型就是已经部分恢复的文庙原状,然后再此基础上对文庙进行了整体的规划设计。
根据本次工程的实际情况,我们采用大疆无人机精灵4作为飞行器进行倾斜摄影测量,主要区域是云南省昆明市呈贡区孔子文庙,飞行高度在6~10m之间,飞行航线采用航向重叠和旁向重叠最少要在75%以上,如果建筑物表面有凸出或者是镂空等部位,有必要对建筑物局部进行多角度重新采集。
本次拍摄难点在于文庙位于县城内,周围是居民住宅较为繁华,周边都是高树环绕、居民楼围绕,无人机飞行受限,因为古建筑相对于现代建筑细节设计更精细,所以我们选择对于主体结构分组拍摄,将最后呈现出来的作品更加精细。分别是整体场景拍摄、泮池、孔子像、棂星门、大成主殿的拍摄,分别生成模型。先采用直线式飞行航路进行整体场景拍摄,然后分别对四个主体建筑物进行单体提取[3],然后为了达到更高的精度,再次对泮池、孔子像、棂星门、大成主殿四个主体建筑物分别采集数据,主要是采用环绕式飞行航线,建筑的屋檐下面是不可避免的拍摄盲区,文庙内有大量树木所以不能采用无人机飞行,所以我们采用人工利用相机进行补拍,将补拍后的数据与原先无人机采集的数据整合在一起,生成最终的模型,图4为飞行轨迹。
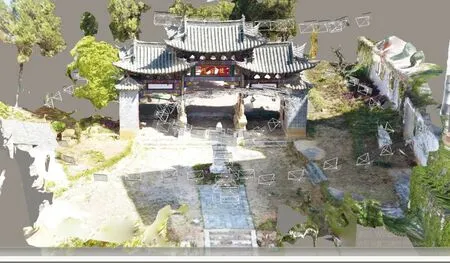
图4 图像控制点的分布
用Context Capture生成的模型可能会有其他不需要的部位也同时生成,此时我们就需要把模型导入MicroStation中,将不需要的部分用剪切模式剪掉,然后将五组拍摄内容组合成一个整体模型。
LumenRT又称为“现场模拟软件”,其可以为数字基础设施信息模型创造一个真实的场景。我们将最后做好的组合模型导入到LumenRT中,充分还原现有文庙的场景,并对文庙进行了景观规划,将文庙打造成集文化与休闲于一体的旅游胜地。整体道路采用八卦走向布置,以泮池、孔子像、棂星门、大成主殿为中心,东边设置一个停车场分机动车和非机动车停车区域,西边设置休息中心,里面有文化交流长廊和休息座椅,为了保障文庙环境,休息区域不能提供餐饮服务。
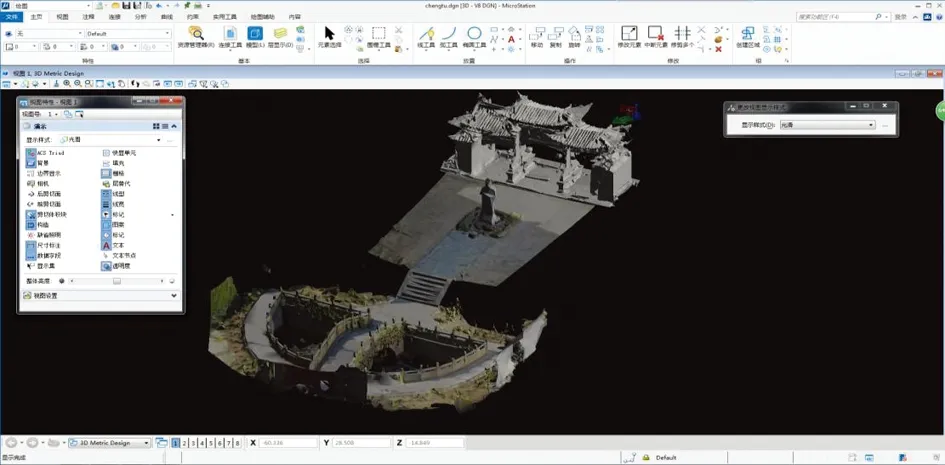
图5 模型局部组合整体示意

图6 模型整体效果示意

图7 孔夫子像与棂星门三维实景模型
4.2 隧道洞口监测与检测
随着我国基础设施快速的发展,公路、铁路出现了越来越多的山岭隧道,而众所周知山区隧道地质条件大都复杂多变,特别是洞口段围岩大多破碎,地质条件差,开挖边、仰坡又破坏了山体原有平衡,因此洞口往往是地质条件极为复杂的地段。所以隧道洞口段检测与养护更是后期维护的重中之重,隧道洞口段,一般要进行地表监测和洞内监测。地表监测主要是利用水准仪观测地表有无下沉,观察隧道地表有无裂缝等; 洞内监测项目通常有拱顶下沉、周边位移以及地质和支护状况观察等。传统的检测方法主要是依靠人工检测,而往往隧道都是在比较偏远的山区亦或是地形比较复杂的地段,检测方式局限性很大,考虑到隧道监测工程的特殊性、艰巨性、复杂性和对人力和物力的巨大消耗,现用实景建模方法结合动态测试技术进行隧道洞口段位移沉降监测与检测,能够快速将隧道洞口三维模型建立出来,无需耗费大量的人工和机械费用,然后将隧道洞口三维模型导入监测平台,可以进行实时监测。
实验采用了图8所示的无人机航摄装备,其配备的相机镜头FOV94°35mmf/2.8焦点无穷远,搭载传感器为1/2.3英寸CMOS,有效像素1 276万,试验对象为云南省呈贡到澄江段提古铺隧道,该隧道是一个典型的山岭区隧道,双向六车道,其洞口入口位于山体坡脚处,出口位于山腰处,隧道长1 730m和1 684m,左右两幅分离式隧道。
依倾斜摄影建模方法,无人机定高18m,航向重叠度和旁向重叠度都为0.8,无人机按图8所示一条航线,共获取建筑的75张影像。然后利用前述数据处理方法,将采集的影像数据处理后生成相应的密集点云、三维tin和实景三维模型,如图所示。将生成的三维实景模型与BIM模型整合,以实景网格形式导入Openroad中与做生成的隧道洞身结构相结合,然后在InRoads Suite中进行采集并加入勘测信息:处理任意类型的现场数据勘测、ASCII、GPS、LiDAR、等高线图、摄影测量和多种其他格式的数据。根据需要,修改和处理数据,并在设计完成后将设计数据上传到数据收集器以供监测,也可以上传到自动机器引导装置用于场地准备。
由于我们获取的影像数据本身就带有精确的地理位置信息,如果没有,我们可以在生成模型的软件Context Capture中导入影像数据的地理位置信息,这样最后生成的三维模型无论是从输入和输出都带有位置信息,可以对同一个隧道洞口,进行重复多次定期的图像数据采集,然后导入监测软件进行变形分析,如果有位移偏差,同一时期生成的模型也会有位移偏差,也就和最初的模型有位移偏差,而新建立的模型也不能和隧道洞身如初完美结合。同时期多次采集数据是为了避免因为人为原因或机械原因而产生的数据误差,如有误差将同一时期偏差量较大的数据剔除。定期采集数据可以对模型采取几个控制点,然后对每个控制点的方向变形值绘制变形过程线,便可以直观地反映出来变形的趋势、规律和幅度。如图8所示。
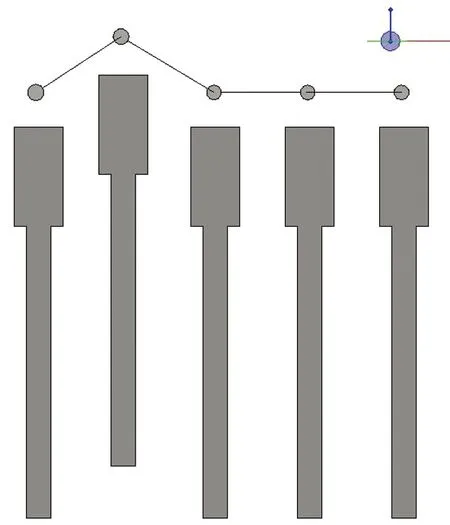
图8 隧道洞口变形分析
我们可以利用无人机对隧道洞口进行定期、多次图像数据采集,然后进行内业作业建立实景模型,之后将模型导入云平台技术与其相结合,通过云平台实时传输采集到的数据,并且可以通过云平台对数据进行定期整理。依托于计算机技术的快速发展,可以形成一个集数据采集、整理、分析、报告、反馈为一体的监测系统,可以实时获取数字信息并且进行数据实施管理,云平台可以快速传输数据并且保证工程各个参与方上传、下载数据,一般的监测系统主要包括传感器子系统、数据采集传输子系统和数据管理子系统。而BIM理念就是建立一个和现实世界平行的虚拟世界,利用在施工初期安装于隧道洞口各构件部位的传感器等监测仪器,实时采集隧道洞口数据并传输到云平台进行数据分析,通过一系列的计算分析能实时反映其受力情况、力学性能、结构特性等随着时间的变化情况,进而真正做到将BIM贯穿于建设项目的全生命周期[4]。如图9-13所示。

图9 空三运算结果 图10 任务区域划分
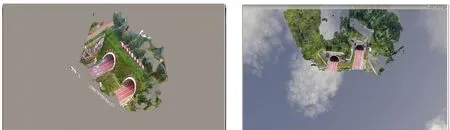
图11 隧道入口模型 图12 隧道出口模型
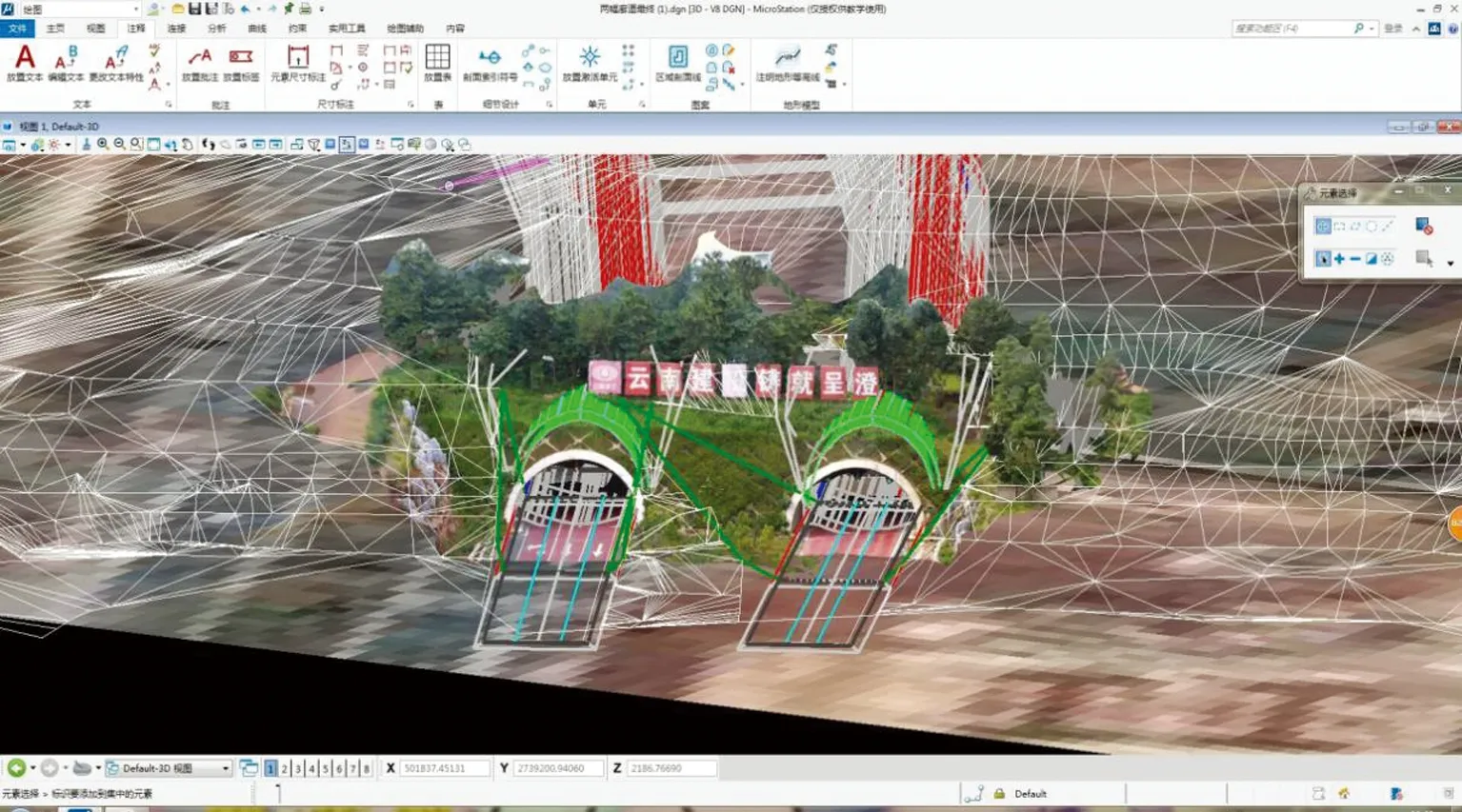
图13 实景模型与隧道洞口结合
4.3 技术不足之处
倾斜摄影测量时获取地物真实高度的,经过实际测量尺寸与建好模型进行数据对比,误差可以控制在毫米级,所以所建模型可以作为规划参考。如表2所示。
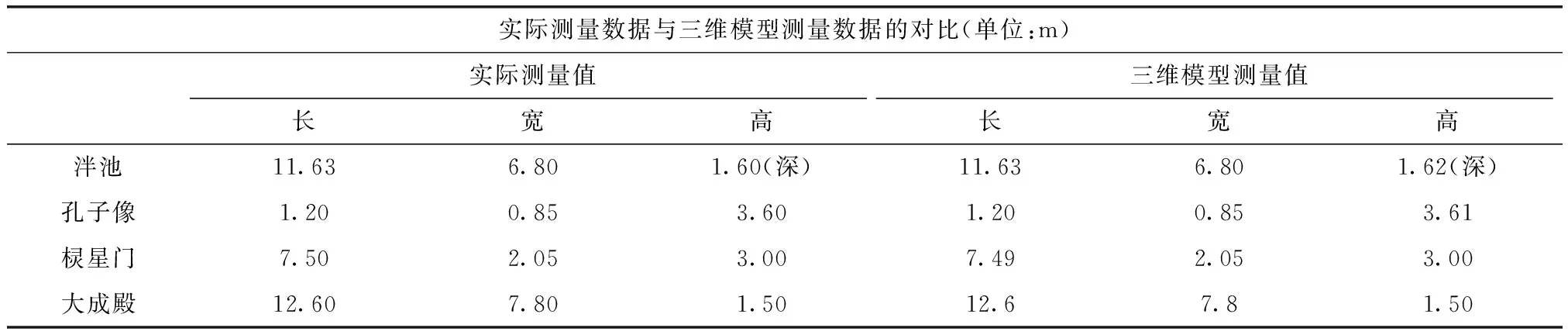
表2 古建筑实际测量数据与3D模型测量数据的比较
为了满足对单体建筑物的精细化管理,倾斜摄影技术先获取大场景数据,然后进行内业作业,接着可以对生成的三维实景模型中的单个建筑物进行单体化处理。将三维实景数据转换为.3ds或.obj的格式,然后导入到3dMax 中,在大场景中拆分提取需要的单个建筑物,根据命名规则进行命名并输出成.max格式的单个要素对象。
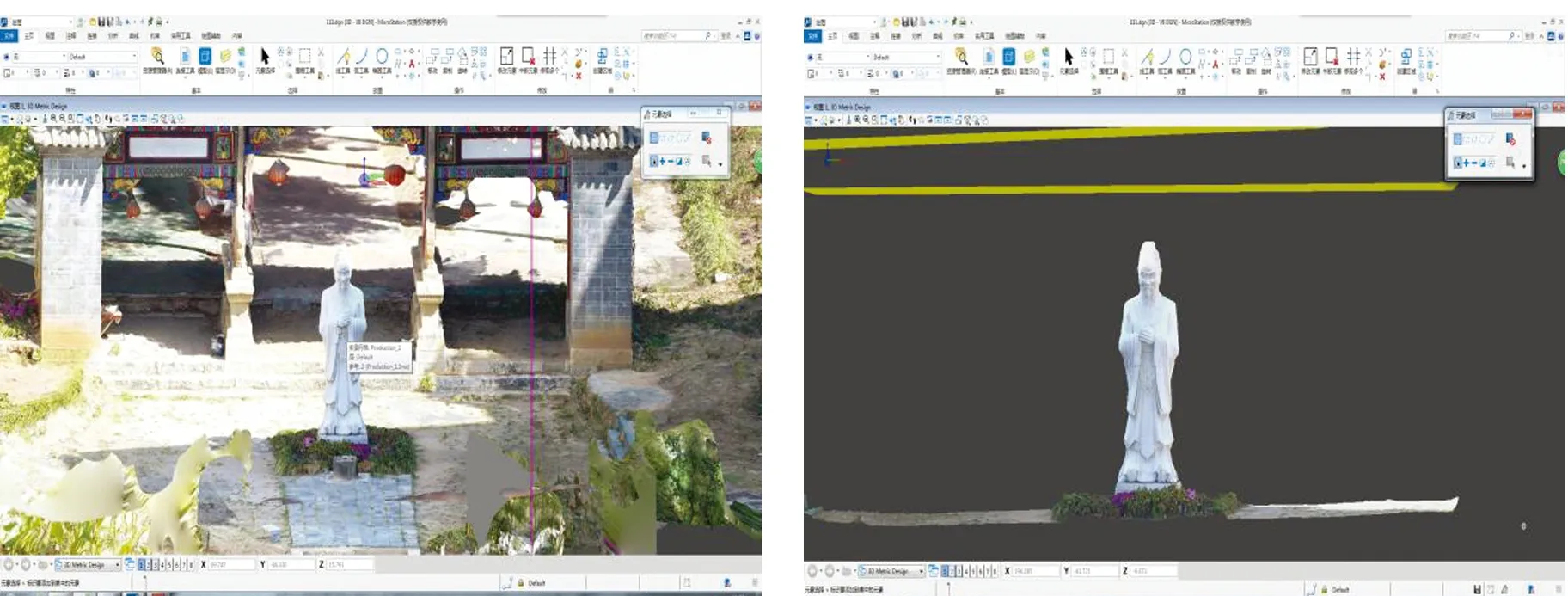
图14 三维实景全图 图15 对象单体化提取
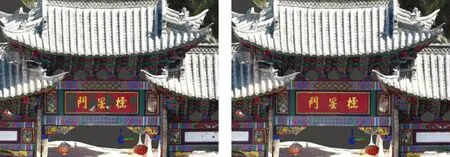
图16 CC生成实景模型 图17 MS修补后模型
在进行数据采集的过程中,因为过少的影像数据或者是较低清晰度的影像数据,或者是拍摄物缺乏纹理或颜色变化少的平面、亦或是因为光照或者其他因素的高反射现象使得相机在获取物体表面信息的时候被“致盲”了,使得那片区域的信息表达不准确,生成的三维实景模型上带有“破洞”现象,而倾斜摄影技术可以进行“补洞”,也就是可以通过手动添加约束对指定区域进行平面化处理,在保证模型效果、不破坏原始数据和LOD的同时,实现三维和二维GIS的完美一体化,它打通了基于三维的倾斜摄影与基于二维的矢量面之间的关键“关卡”,不仅可以弥补倾斜摄影数据本身的问题,还能提高不规则物体的还原度。上图是文庙棂星门三维实景模型,其中图15中棂星门三个字处出现了“破洞”的现象,图16是修补后的实景模型。
就像上面两个实例中遇到的问题,现在利用倾斜摄影技术会遇到拍摄盲区,比如建筑物的屋檐下面,隧道的洞口内部处,或者是立交桥的下面等,无人机的镜头就像是人的眼睛,眼睛不能看到遮挡物后面的区域,而这些被遮挡的地方就是不可避免的盲区,遇到盲区现在可以采取人工采集数据与无人机采集数据相结合。也利用倾斜摄影测量+街景,这种方法既可以利用现有的资源同时还能弥补两种技术的不足,但具体如何实施还要靠具体工程实现。
5 结论
实景建模技术已经是行业内都在推崇的一种建模手段,利用无人机搭载相机的倾斜摄影技术可以快速、低成本、高精度的建成三维实景模型,而具体的实景建模技术还可以与更多的实际工程相结合,能够大大的降低工程费用,提高工程效率,加快工程进度,实景建模技术必定是推动数字化城市、数字化地球的一把利器。
