基于BP神经网络的无刷电机控制系统的研究
2018-10-10吕丰李振强李泽洋彭缓缓
吕丰 李振强 李泽洋 彭缓缓
摘要:文章针对无刷电机速度系统固有的问题,分别设计模糊控制器和自适应BP神经网络控制器。通过分析系统的数学模型并建立Simulink仿真平台,对设计的控制器进行验证。仿真结果表明,自适应BP神经网络控制具有超调量小、调节时间短的优点。
关键词:无刷电机;模糊控制;BP神经网络
中图分类号:TM351 文献标识码:A 文章编号:1007-9416(2018)07-0014-02
無刷直流电机(BLDCM)作为采用电子换向[1]的强耦合[2]的非线性系统,常规PID难以完成精确控制的任务。智能控制[3]及新型控制算法[4]已成为研究的主流,如模糊控制、神经网络[5]等。本文对设计的两种控制器进行仿真实验,通过仿真证明所设计的控制器的有效性。
1 无刷直流电机的数学模型
假定BLDCM定子三相绕组120°对称,忽略气隙磁导和涡流损耗的影响,根据定子三相绕组的电压方程式,由于三相对称,,化简电压方程,可得状态方程为:
2 模糊PID控制器的设计
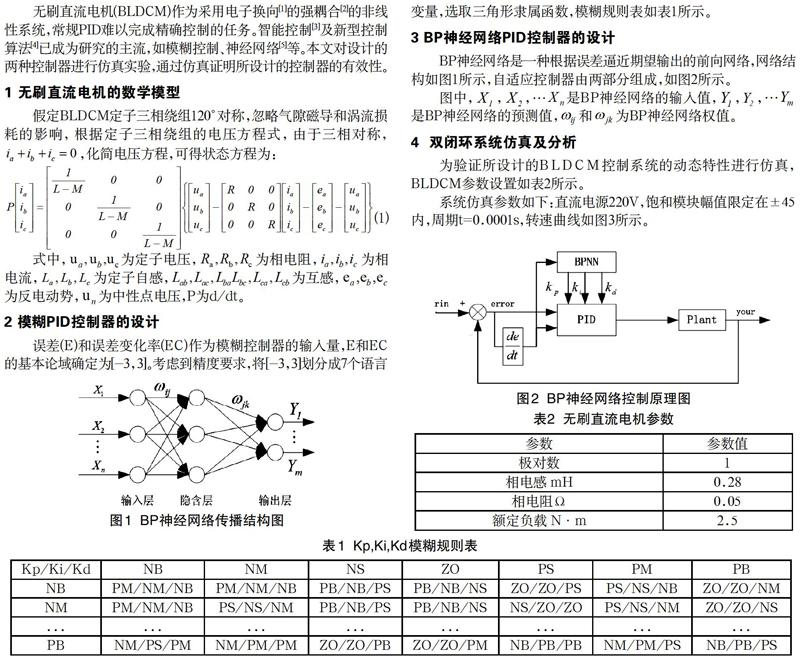
误差(E)和误差变化率(EC)作为模糊控制器的输入量,E和EC的基本论域确定为[-3,3]。考虑到精度要求,将[-3,3]划分成7个语言变量,选取三角形隶属函数,模糊规则表如表1所示。
3 BP神经网络PID控制器的设计
BP神经网络是一种根据误差逼近期望输出的前向网络,网络结构如图1所示,自适应控制器由两部分组成,如图2所示。
图中,,,是BP神经网络的输入值,,,是BP神经网络的预测值,和为BP神经网络权值。
4 双闭环系统仿真及分析
为验证所设计的BLDCM控制系统的动态特性进行仿真,BLDCM参数设置如表2所示。
系统仿真参数如下:直流电源220V,饱和模块幅值限定在±45内,周期t=0.0001s,转速曲线如图3所示。
由转速曲线可以看出,在n=2000r/s的设定转速下,常规PID的超调量最大,调节时间最长;通过对比模糊控制器,可见,自适应BP神经网络控制的超调量最小,调节时间最短,控制效果最好。
5 结语
本文研究了BLDCM系统的两种控制策略及其建模方法,在Simulink环境下搭建BLDCM仿真模型进行测试,仿真结果验证了自适应BP神经网络控制具有较好的稳定性和快速性,控制效果较理想。
参考文献
[1]李凡.基于FPGA的全数字无刷直流电机控制系统研究[D].重庆:重庆大学,2010.
[2]王晓远,傅涛.基于模糊RBF神经网络的无刷直流电机控制[J].微电机,2015,48(11):33-36.
[3]曹雪,付光杰,牟海维.改进的BP网络PID控制器在无刷直流电机中的应用[J].组合机床与自动化加工技术,2014,(8):102-104.
[4]李国芳.基于DSP的无刷直流电机伺服系统研究与设计[D].青岛:青岛大学,2015.
[5]崔磊.基于DSP的无刷直流电机运动控制系统研究[D].大连:大连理工大学,2015.
