LHAASO-WCDA时间刻度系统设计与实现
2018-10-09马吉宁孙志斌
马吉宁,孙志斌,郑 福
(1.中国科学院国家空间科学中心北京100190;2.中国科学院大学北京100049)
大型高海拔空气簇射观测站(Large High Altitude Air Shower Observatory,LHAASO)是我国科学家在宇宙线研究领域提出的重大科研项目,以甚高能伽马天文与宇宙线观测研究为核心的国家十二五重大科技基础设施项目之一,旨在探索高能宇宙线起源等重大物理课题[1]。LHAASO整体的探测器阵列有四部分,电磁粒子探测器阵列、缪子探测器阵列、水切伦科夫探测器阵列、水切伦科夫望远镜阵列,其中的水基切伦科夫探测器阵列(Water Cherenkov Detector Array,WCDA)是由4个150×150㎡的水深4.5 m的总面积为90000㎡大型水池构成。WCDA的主要功能是在甚高能中低能段对整个北天区的伽马源进行巡天观测。来自宇宙的宇宙线次级粒子在水中产生的切伦科夫光子经过传播达到探测器表面,经过探测器的光电转换形成电脉冲信号,利用电脉冲信号的时间信息和电荷信息可进行原始数据的重建。为了保证数据的正确性,需要对探测器进行标定。从数据的角度上来讲,标定分为电荷标定和时间标定[2]。而对于WCDA来说,最主要的科学目标是发现新的甚高能γ辐射源,提高辐射源的样本数量,具体实现是通过探测器单元记录到的簇射信息重建出原初粒子方向[3]。
为了尽可能减小探测器对辐射源的指向误差,探测器通道之间的相对时间差的标定就至关重要。本文基于LHAASO-WCDA时间标定方法[3,4],以现场可编程逻辑门阵列FPGA和时间数字转换器TDC7201为核心部件,设计了一种可远距离传输的时间刻度系统,实现了对多路探测器之间相对时间差的测量和修正,为WCDA的时间差标定提供了实施方案,从而进一步为宇宙线的精确重建奠定基础。
1 系统设计方案
整个时间刻度系统主要由同步触发单元、光源驱动单元、时间差测量单元三部分组成。由WCDA的时间标定方案可知,标定光源均匀分布在整个WCDA水池中,光源驱动单元也因此必须均匀分布于整个水池中。这就要求同步触发单元发出的触发信号需经过远距离的传输,传输距离最远可达300米。常见的远距离传输方案包括RS485、光纤通信等。光纤通信传输距离远、通道之间时延小、环境影响小[5],但原材料采购成本高、施工难度大、系统维护繁琐;RS485满足远距通信要求(最远1200 m)、线缆成本低、施工难度小、系统维护简单、可以实现单脉冲传输,其最大的缺点在于各通道时延大,同步信号抖动。综合考虑成本、工程实现以及RS485、光纤的优缺点等因素,最终选择RS485为触发信号的传输介质。因为电流传递的速度取决于介质[6],所以RS485的通道时延在系统设计完成后是固定值,时间测量模块会选择某一通道为基准信号,测量出其余通道与此通道的时间差。同步触发单元会根据各通道的时间差对触发信号进行修正。为使各路触发信号灵活调节,同步触发模块输出的多路同步信号之间的相对延时应可调节,以保证光源驱动单元接收到的同步触发信号在100ns的误差之内。针对此同步性以及并行性要求,同步触发模块的核心控制芯片选用FPGA,FPGA的IO口数量众多可以满足多路信号输出要求,由于FPGA采用并行工作方式,能满足多路信号同时输出,此外当FPGA的IO时钟达到200 MHZ时,各路信号之间的时延精度可达到5 ns。时间差测量单元以TDC7201为核心,TDC7201内置有两个时间数字转换器(TDC),架构简单,无需昂贵的处理器,每个TDC可执行秒表功能,测量START脉冲与多达5个STOP脉冲之间的时间间隔。整个系统的构成如图1所示,其中不同光源驱动单元的时间差是在安装前的线长测得,图中做了简化处理。

图1 系统构成示意图
2 同步触发单元软硬件设计
同步触发单元是系统的核心部分,对触发信号的分发以及修正都由此单元完成。整个单元分为上位机和下位机两部分。上位机的功能是为各路触发信号配置频率、脉宽、时延等参数,并将各参数数据打包通过串口发送给下位机。下位机的功能为接收上位机发送来的参数数据,并以此配置各路触发信号,将信号输出。整个单元的功能框图如图2所示。
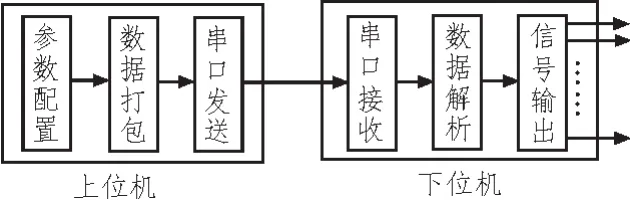
图2 同步触发单元功能框图
2.1 下位机硬件电路设计
硬件电路的核心器件是Xilinx公司Virtex-5系列的高性能FPGA,以满足高精度多通路的系统要求。由同步触发单元的功能可知,RS232电路和RS485电路必不可少。整个电路板的主要部分包括电源电路、FLASH、FPGA、TTL转RS232电路、TTL转RS485电路等。电路板通过RS232串口线与上位机相连,以接收上位机发送来的数据。电路板通过RS485与脉冲光源驱动单元相连,已发送同步触发信号。电路板由5V开关电源供电。硬件电路的结构示意图如图3所示。
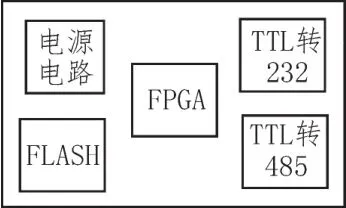
图3 同步触发单元硬件电路结构示意图
2.2 下位机程序设计
下位机程序基于Verilog硬件描述语言设计实现。由下位机的功能,可将下位机分为如下几个模块:1)串口接收模块,用于接收上位机发送来的数据。串口接收模块主要由波特率产生模块和数据接收模块组成。波特率产生模块通过对时钟信号分频,产生实际所需要的波特率。数据接收模块将串行数据转化为并行数据发送给数据包解析模块[7-8]。2)数据包解析模块,用于解析接收到的数据包[9];3)信号输出模块,根据从数据包解析出来的参数,配置相应通道的脉冲,并将脉冲输出。下位机的逻辑电路图如图4所示。
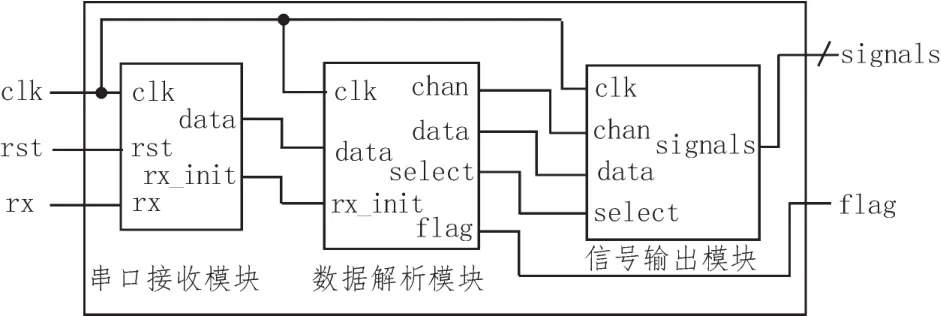
图4 下位机逻辑电路图
2.3 上位机软件设计
上位机软件基于LabVIEW编写。上位机与下位机的通信通过串口传输,使用LabVIEW中的VISA控件具体实现[10]。为了实现对多路触发信号参数方便灵活的配置,上位机设计了3种配置模式。分别为统一配置模式、单独配置模式和文件配置模式。统一配置模式下,可以实现对所有通路的脉宽、时延参数的一次性配置,所有通路的脉宽、时延参数相同。单独配置模式下可选择某一特定通路对其脉宽、时延参数进行单独配置。文件配置模式下[11],需按一定格式编写配置文件,导入配置文件后,可对所有通路进行一次性配置,且每一通路下的配置参数可以不相同。3种配置模式配合使用,可以实现对多路信号灵活快捷的配置。上位机界面如图5所示。

图5 上位机界面
上位机程序的主体结构为循环结构和事件结构[12]。程序运行前要对串口进行配置,包括选择正确的COM口、配置波特率、数据位、校验位、停止位等参数。串口正确配置后,点击运行按钮,程序首先对串口进行初始化,然后进行事件的循环检测。上位机运行流程如图6所示。

图6 上位机流程图
2.4 数据包格式的设计
由于通道数较多,每个通道又需要独立配置,再加上方便扩展等原因,需要对数据包的格式进行设计。数据包的格式设计如表1所示,其中,帧头可以提高数据接收的容错率。选项和通道的灵活定义可以方便之后各种参数的配置以及通道的扩展。

表1 数据包格式定义
3 光源驱动单元软硬件设计
光源驱动单元被均匀在整个WCDA水池中,其功能是接收同步触发单元通过RS485远程发送来的触发信号,并根据光源驱动单元的上位机发送来的配置信息,输出光源驱动信号。光源驱动信号的频率与触发信号相同,脉宽、时延参数由上位机控制。光源驱动单元的电路与同步触发单元的硬件电路大致相同,在同步触发单元的基础上增加了脉冲输出电路[13]。此外,水池中的所有光源驱动单元由一个上位机控制,由于RS232不适合远距离传输,光源驱动单元与上位机通过RS485进行数据传输[14]。光源驱动单元的逻辑电路图如图7所示。其中,rs_485端口用于连接上位机,trigger用于连接同步触发单元发送来的触发信号。pulse用来输出驱动光源的脉冲。

图7 光源驱动单元逻辑电路图
光源驱动单元的上位机功能与触发单元上位机的的非常相似,区别主要在于无需配置频率参数。
4 时间测量单元
时间测量单元用来测量通道之间的时间差[15],同步触发单元会根据此时间差信息修正触发信号的延时,从而使得各通道触发信号同步到达各驱动单元。时间测量单元的硬件使用的是TI公司的MSP-430单片机和TDC7201时间数据转换器。TDC7201内置两个时间数字转换器(TDC),架构简单,无需使用昂贵的FPGA或处理器。每个TDC均可执行秒表功能,测量START脉冲与STOP脉冲之间的时间间隔[16]。该器件内置自校准时基,可对时间进行补偿。时间测量单元的功能框图如图8所示。
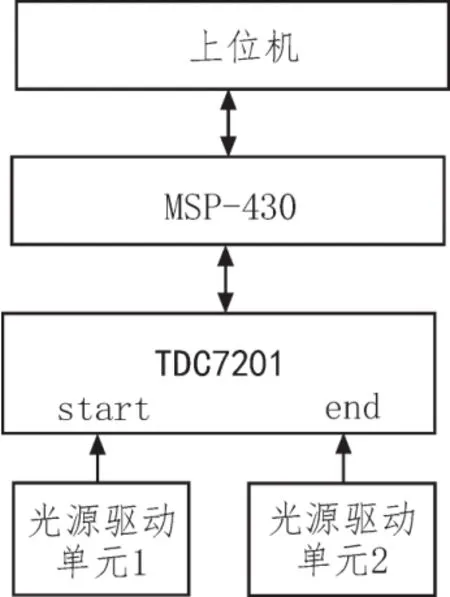
图8 时间测量单元功能框图
5 实验结果分析
首先对同步触发单元进行测试。使用RS232串口线连接上位机与电路板,运行上位机软件,分别使用3种配置模式对触发信号进行配置,调整频率、脉宽、时延等参数,使用示波器测试输出的触发信号,验证每种配置模式的效果是否正确。然后测试光源驱动单元。使用双绞线连接同步触发单元的输出与光源驱动单元的输入,同时连接同步触发单元的上位机软件和电路板,在上位机上更改脉宽、时延,测量脉冲输出信号的频率是否与同步触发单元的输出频率相同,脉宽、时延是否与上位机的配置相同。
最后,对整个系统进行测试。选取一个光源驱动的输出脉冲为基准信号,测量其余通道的输出脉冲与基准脉冲的时间差,并以此时间差信息调整对应通道的时延参数。每个通道使用不同长度的双绞线,修正前后的结果如图9所示。实验结果表明,各通道的时间差在20 ns以内,满足100 ns误差的指标,同步性良好。

图9 实验结果
6 结束语
本系统实现触发信号的远程传输,并对传输后的触发信号的时间差进行了测量,根据测量结果对时间差进行了修正,修正后的触发信号的时间差在20 ns之内,同步性能满足了LAHSSO-WCDA时间标定方案的需求,为标定方案实施奠定了前期基础。
