计及风电并网模型的电动汽车集群参与系统频率调整策略
2018-09-29胡熙茜
李 嫣,张 谦,李 晨,胡熙茜
计及风电并网模型的电动汽车集群参与系统频率调整策略
李 嫣1,张 谦1,李 晨2,胡熙茜1
1.输配电装备及系统安全与新技术国家重点实验室(重庆大学),重庆 400044; 2.中国南方电网超高压输电有限公司广州局,广东 广州 510620)
为解决风能随机性和波动性带来的风电机组频率支持可靠性不高的问题,采用电动汽车与风电机组协同参与系统调频。对风速区域进行划分,根据风电机组运行特性,利用虚拟惯性控制、下垂控制和变桨距角控制三种控制方式建立调频模型;结合电动汽车集群控制策略,通过对系统调频需求的分配,提出电动汽车集群和风电联合调频的控制策略。算例结果显示,联合虚拟惯性和下垂控制同时作用时风电机组调频效果较好,电动汽车和风电机组联合调频效果优于风电独立参与调频。仿真证明所提出的联合调频策略能有效抑制频率偏移,维持系统频率稳定性。
电动汽车;风电机组;联合频率调整;虚拟惯性控制;下垂控制;变桨距角控制
0 引言
随着微电网中风电渗透率不断提高,风力发电的间歇性将直接影响微电网系统内部有功功率的供需平衡,造成频率波动难以控制。各国均出台并网导则,规定风电场必须具备有功功率调节、响应系统频率变化的能力[1]。而当前主流风力发电机组为双馈式变速风力发电机组,其通过电力电子设备接入电网,并不具备惯性响应及辅助调频能力。要实现变速风电机组参与调频的目的,需要采用附加控制方式。
利用风电机组自身有功功率控制以实现参与调频目的的方法主要有虚拟惯性控制[2]、下垂控制[3]和变桨距角控制[4]。虚拟惯性控制和下垂控制均是通过改变转子转速,释放转子动能来参与系统频率调整。变桨距角控制是通过改变风电风机叶片攻角,改变风机捕获风能大小,进而改变自身有功功率输出。现已有不少研究将虚拟惯性控制、下垂控制和变桨距角控制联合以参与系统频率调整[5-7]。
因为风能具有随机性和波动性,由风电机组提供的频率支撑的可靠性很难得到保障,对于刚参加过电力系统调频的风电机组需要尽快恢复到最佳转速,这就需要从系统中吸收部分有功,这很容易造成系统频率的二次跌落,因此风电机组很难独立为微电网提供主要频率调节。而附加储能系统与风电机组协同调频,不仅可以有效抑制风电的随机波动,提高风电机组的频率响应能力,而且可以有效地改善电力系统的频率响应特性[8]。然而,附加储能系统参与风电调频需要增加大量额外的设备,这将大幅度增加风电场的运行成本。同时,该方法仅从电源端改善系统频率,没有充分发挥负荷在电网调频方面的积极作用。
电动汽车(Electric vehicle, EV)具有负荷和电源双重身份,可以取代附加储能设备,与风电机组协同参与系统调频。目前关于电动汽车集群和风电联合参与系统调频的研究较少,现有研究侧重于电动汽车集群和风电参加频率调整控制模型的搭建。文献[9]通过分层控制算法实现电动汽车集群充放电和风能发电在系统频率调整中的协同控制,但仅由电动汽车集群通过充放电单独参与下层频率调整,而风电只进行上层发电调度计划,并不参与下层频率调整,针对两者联合调频的相互耦合关联的控制方法鲜有提及。文献[10-11]通过不同原理的控制理论构建微电网负荷频率控制模型的PID控制器,通过PID控制器分别控制电动汽车集群和风电的调频模型以响应系统频率变化信号,但均忽略了微电网调频过程中系统有功功率分配策略对两者联合调频模型及调频参与度的影响。
因此,针对风电与电动汽车相互耦合的联合调频控制方法与调频过程中有功功率分配的问题,本文研究了电动汽车集群和风电联合调频的分级协调控制策略,以实现两者联合调频协调控制机制的建立。基于双馈变速风力发电机(Double-Fed Induction Generator, DFIG)运行特性,在不同风速等级下,结合虚拟惯性控制、下垂控制和变桨距角控制建立了风电机组调频模型,并在考虑个体需求的电动汽车调频策略的基础上,通过对系统调频需求功率的分配,制定了电动汽车和风电联合参与电网调频的控制策略。
1 双馈式变速风力发电机调频策略框架
通过不同的控制器控制转子和电网两侧的变流器及叶片攻角,可以实现对风机输出机械功率的控制,进而使DFIG具有调节系统频率的能力。


(2) 在低风速区域,转子转速相对较低,调整转子转速进行90%最大风功率跟踪;在中风速区域,转子转速相对较高,无法达到90%最大风功率跟踪状态,调整转子转速运行在变比例最大风功率跟踪状态。在低风速和中风速区域,通过控制转子速度变化,释放转子动能,改变风电机组输出功率,参与系统调频。
(3) 在高风速区域,转子转速维持在额定转速,转子速度和惯性控制器不再参与动作,采用变桨距角控制来调整风机叶片攻角,通过改变风机捕获的风能功率进而改变风电机组输出功率,参与系统调频。
(4) 在无效风速2区域,风速过大,为保护风电机组安全,风电机组在该风速区域内退出电网,不参与系统调频。
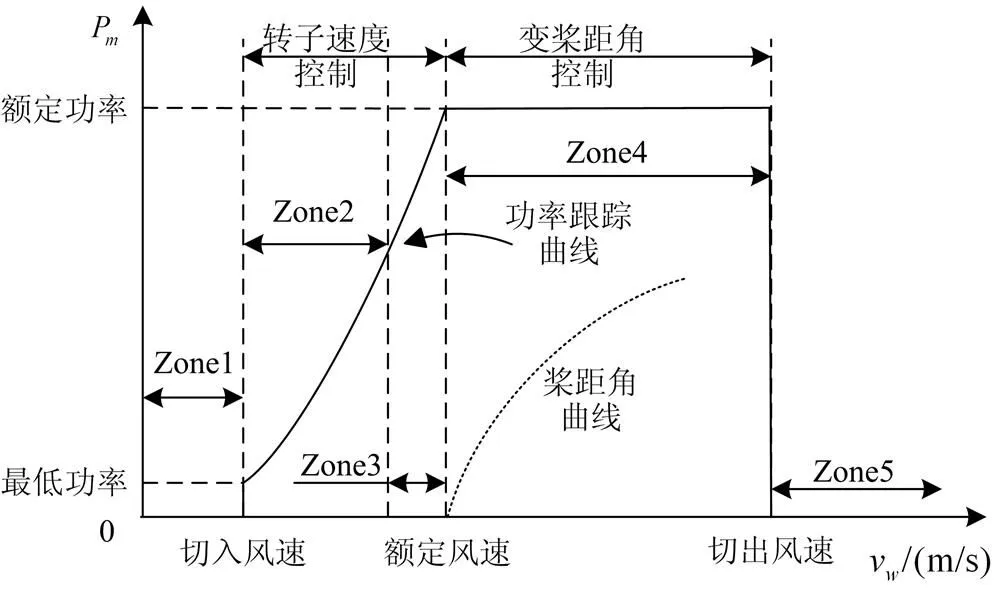
图1 DFIG运行状态
2 低风速和中风速区域调频策略
2.1 转子速度控制方式
如前所述,在低风速和中风速区域,可通过控制转子速度变化,释放转子动能,改变风电机组输出功率,参与系统调频。转子速度控制方式主要采用虚拟惯性控制和下垂控制两类。
2.1.1虚拟惯性控制
当频率下降时,需要降低DFIG转子转速,释放转子中储存的动能。
转子动能在极短时间内释放,以功率输出的形式从转子侧输入到电网侧,如式(3)所示。
为了给DFIG增加具有同步发电机类似的惯性,引入惯性常数,其定义为
对DFIG增加虚拟惯性后,有
则转子释放的动能可表示为
由式(7)知,可以利用DFIG虚拟惯性控制,通过控制释放转子动能所产生的功率,使风力发电机响应系统频率变化。
2.1.2下垂控制

DFIG附加下垂特性后,如式(8)所示。
图2 发电机功频静特性
Fig. 2 Static power frequency characteristics of generator
2.2 转子速度控制策略
为了在不同风速条件下均可产生最大功率,必须对风机转速进行调节,常采用最大功率点跟踪技术(Maximum Power Point Tracking, MPPT)获取最大机械功率。在风电参与系统调频过程中,DFIG为获得调频容量储备,采用90%最优功率运行状态(即次最优)[13]。MPPT运行状态在相同风速条件下具有唯一性,即仅有唯一转子转速对应风机最大功率的输出;而次最优输出功率对应两个不同转子转速,分别为低速次最优和超速次最优。实际运行过程中,常采用超速次最优轨迹运行。
在低风速和中风速区域,DFIG采用不同的转子速度控制策略参与系统调频,如图3所示。由图可知,风电接入电网,转子转速常规运行在0.7~1.2 p.u.范围内,在短暂动态扰动下,可以达到0.6~1.3 p.u.的安全范围[14]。一旦风机转子转速超出安全范围,转子速度保护将会启动,强迫风机脱离电网。
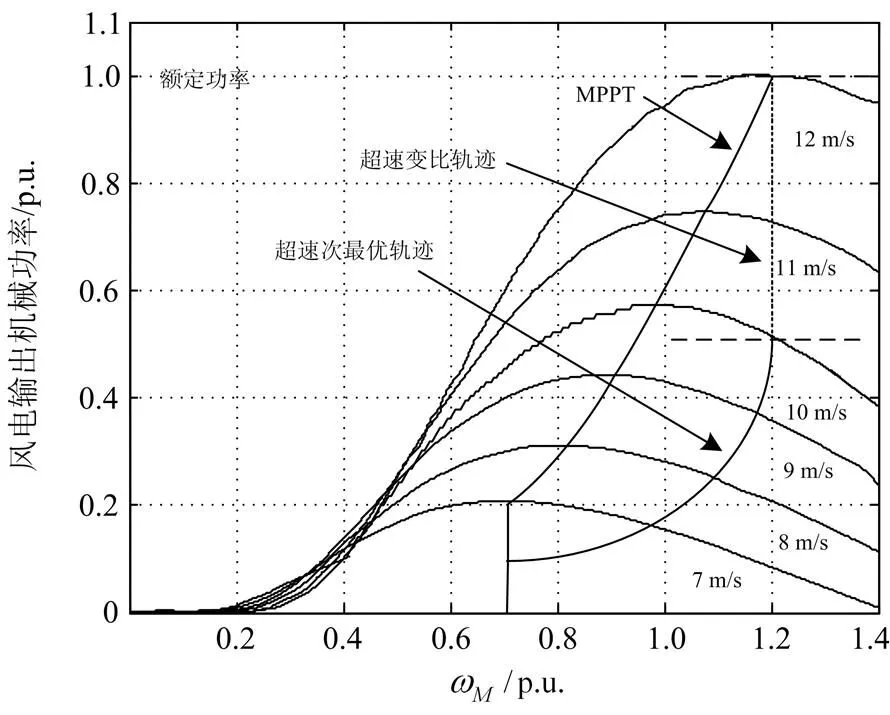
图3 不同风速下转子速度控制运行轨迹
在低风速Zone2区域内,采用超速次最优轨迹控制策略,如图2中加粗黑色实线所示。在该风速区域内,控制转子转速运行在次最优状态,为风机参与系统调频提供了10%的调频容量储备,以便风机在适当减速的情况下,增加功率输出,参与系统向上调频。而在中风速Zone3范围内,采用超速变比轨迹控制策略,如图2中加粗黑色虚线所示。在风速为10 m/s的运行特性曲线中,次最优运行状态的转子速度为1.2 p.u.。若风速继续加大,将会导致转子在次最优运行状态的速度超过正常运行范围。因此,为确保风机能够正常运行,在此风速区域内,转子速度不继续运行在次最优轨迹,而保持在最大常规运行速度1.2 p.u.。此时风机输出功率与最大功率之间的比例为0.9~1,故称为超速变比轨迹。

若频率在此时恢复正常,则停止降低转速,DFIG转入正常运行轨迹运行。若释放动能后,转子速度变为最大功率点所对应转速,频率仍没有恢复正常,则停止减速,该风机运行在最大功率点状态,采取其他的方式恢复系统频率。
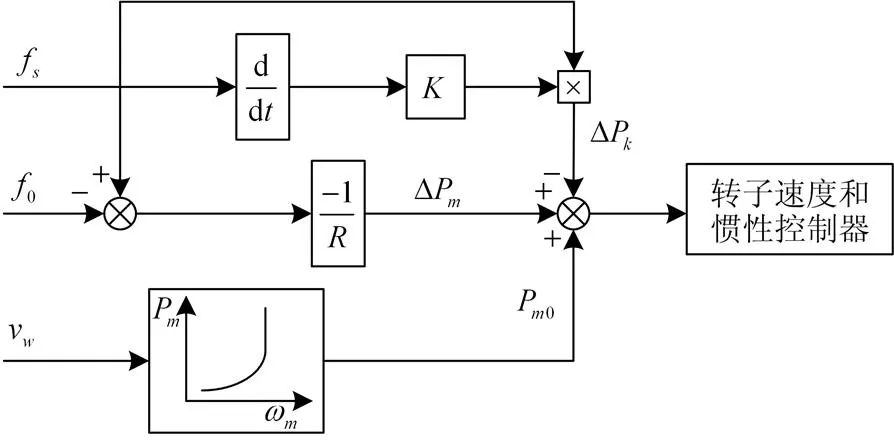
图4 转子速度控制策略原理框图
3 高风速区域调频策略


图5 变桨距角控制原理框图
4 电动汽车集群调频策略
电动汽车作为移动性储能设备,具有响应信号速度快的优点,可以通过有序充放电控制策略参与电网调频。EVA实时收集区域内接入电网的EV的需求申报信息,包括在网时间、荷电状态SOC、EV入网诚信度等。根据在网时间长短和诚信度高低将EV分入调频服务组或能量需求组。调频服务组中,根据EV接入电网SOC状态高低,将其分为充电组和放电组。EVA实时上报区域内调频服务组EV的预测可控容量。电网调控中心根据系统频率波动和风电调频出力分配调频功率需求给EVA,EVA下达指令使调频服务组EV充电或者放电,以达到频率调整的目的。
4.1 电动汽车分组策略
EV只有在满足自身行驶需求的前提下,才会选择接入电网参与调频服务,且结束调频辅助服务后会自动切换进入能量需求组,以满足车主行驶需求。参与调频服务过程中,将EV分为放电组和充电组,规则如表1所示,其中:SOC,j为第辆EV在时刻的荷电状态;max和min分别为荷电状态的上下限。
时刻的调频服务组Se如式(3)所示。

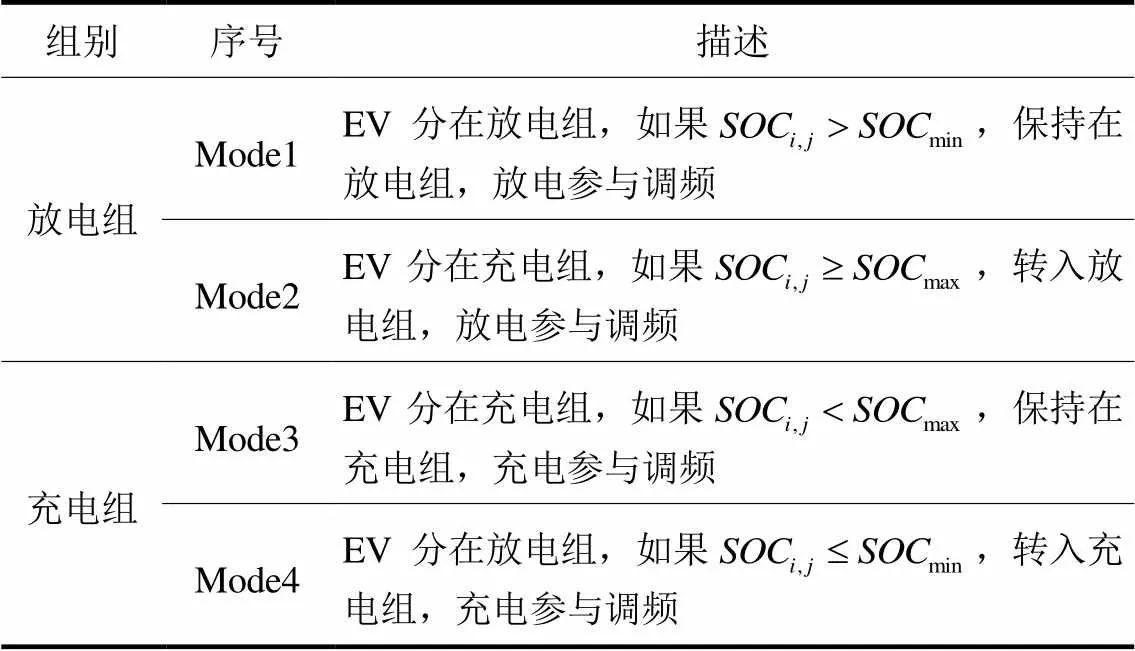
表1 EV分组策略
EV分入调频服务组后,开始接受EVA调频指令,参与服务。时刻第个放电组和充电组分别为


4.2 电动汽车调频功率分配策略
实时调频过程中,EVA根据调频功率需求调动EV充放电参与调频。根据电动汽车的单位参与时间贡献度将其排序,以确定放电组或充电组中参与调频的具体车辆及其输出功率。
4.2.1 EVA可控容量预测
电动汽车作为交通工具,其移动特性使得EV用户存在违背调频计划,在申报时段内脱离电网的可能性,造成可控容量预测不准确。当违背计划的车辆数量达到一定程度,可能导致电网分配至EVA的调频计划无法有效实施。
时刻预测的+1时刻可控容量如下所示。
4.2.2 EV调频功率分配
+1时刻,EV调频功率分配由在时刻所预测的+1时刻可控容量决定。
式中:E为单辆EV电池储能总量;η和η分别为EV充电效率和放电效率。


放电组EV放电功率如式(25)所示:
EV的下调频功率分配策略与上调频类似,不再赘述。
5 电动汽车集群和风电协同控制策略
为了提升风电机组参与调频的可靠性,考虑到风电场运行成本与负荷端频率改善作用,采用电动汽车作为附加储能系统与风电联合参与调频。风电和EV集群协调调频时,优先调用风电参与调频。由于风电参与调频为有差调节,当风电无法单独承担系统调频所需功率时调用EV集群参与调频。
电动汽车集群和风电机组协同参与电网调频的步骤如下:
(1) 根据风电并网风速环境,确定风电能够安全并网。若风电不能安全并网,则系统调频功率需求由电动汽车集群独立承担。


电动汽车集群与风电机组协同控制思想流程如图6所示,两者协同控制模型如图7所示。
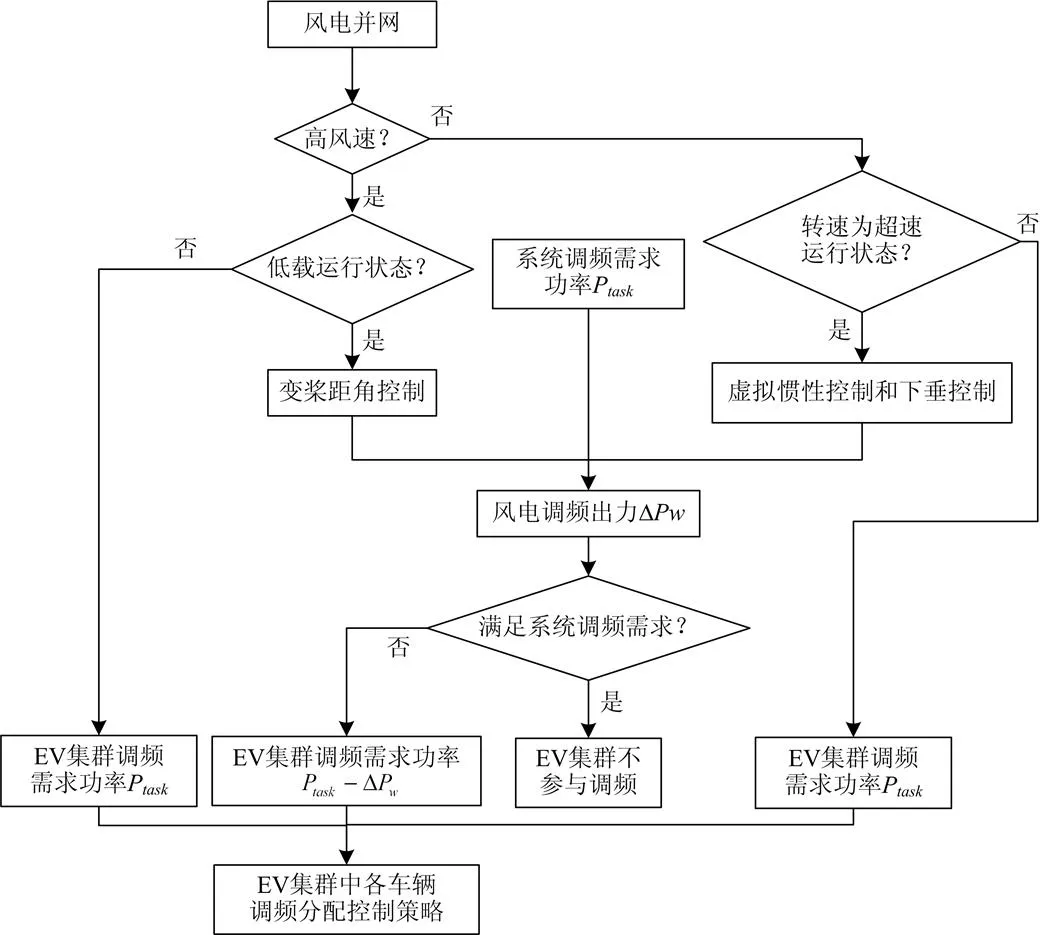
图6 电动汽车集群和风电协同调频流程图
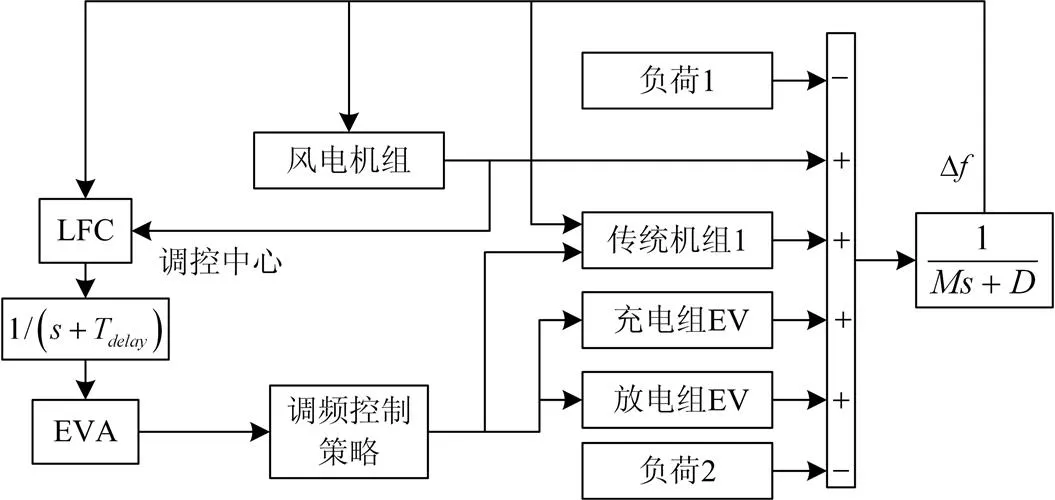
图7 计及风电调频模型的负荷频率控制模型
6 算例仿真
6.1 风电单独调频出力分析
设立三种情景以验证本文所提风电调频策略的有效性。情景一:风速为7 m/s;情景二:风速为11 m/s;情景三:风速为14 m/s。

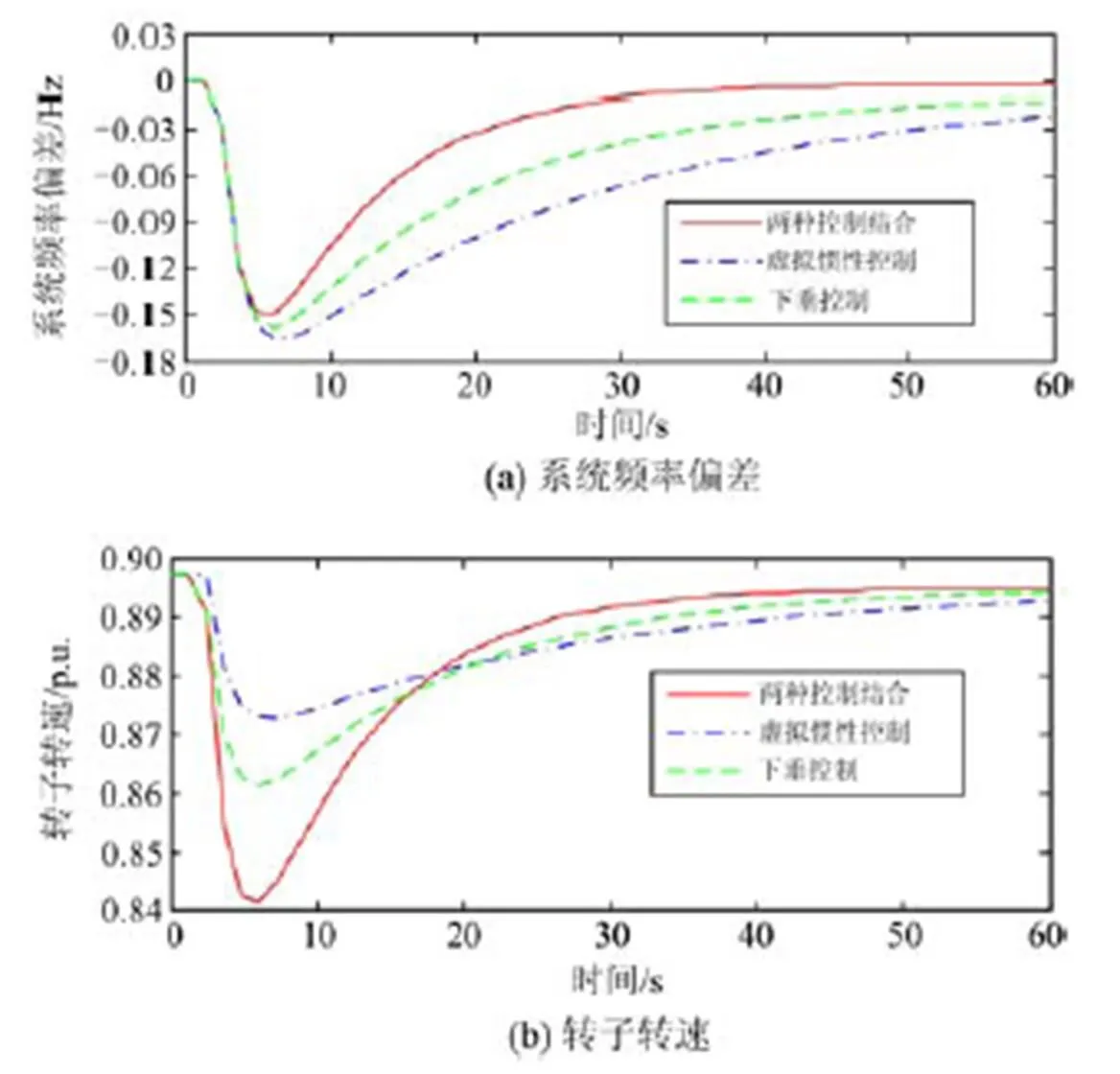
图9给出情景二下DFIG的调频输出。在频率偏差变化不大的情况下,处于中风速区域的转子速度比低风速的下降幅度较小,这是由于中风速区域转子运行速度基数较大,高于低风速区域,仅下降较小幅度所释放的转子动能可提供足够的调频需求。因此,在中风速区域可提供的调频功率增量要大于低风速区域。由于情景二处于中风速区域,仅采用转子速度控制,故桨距角仍维持为0°。
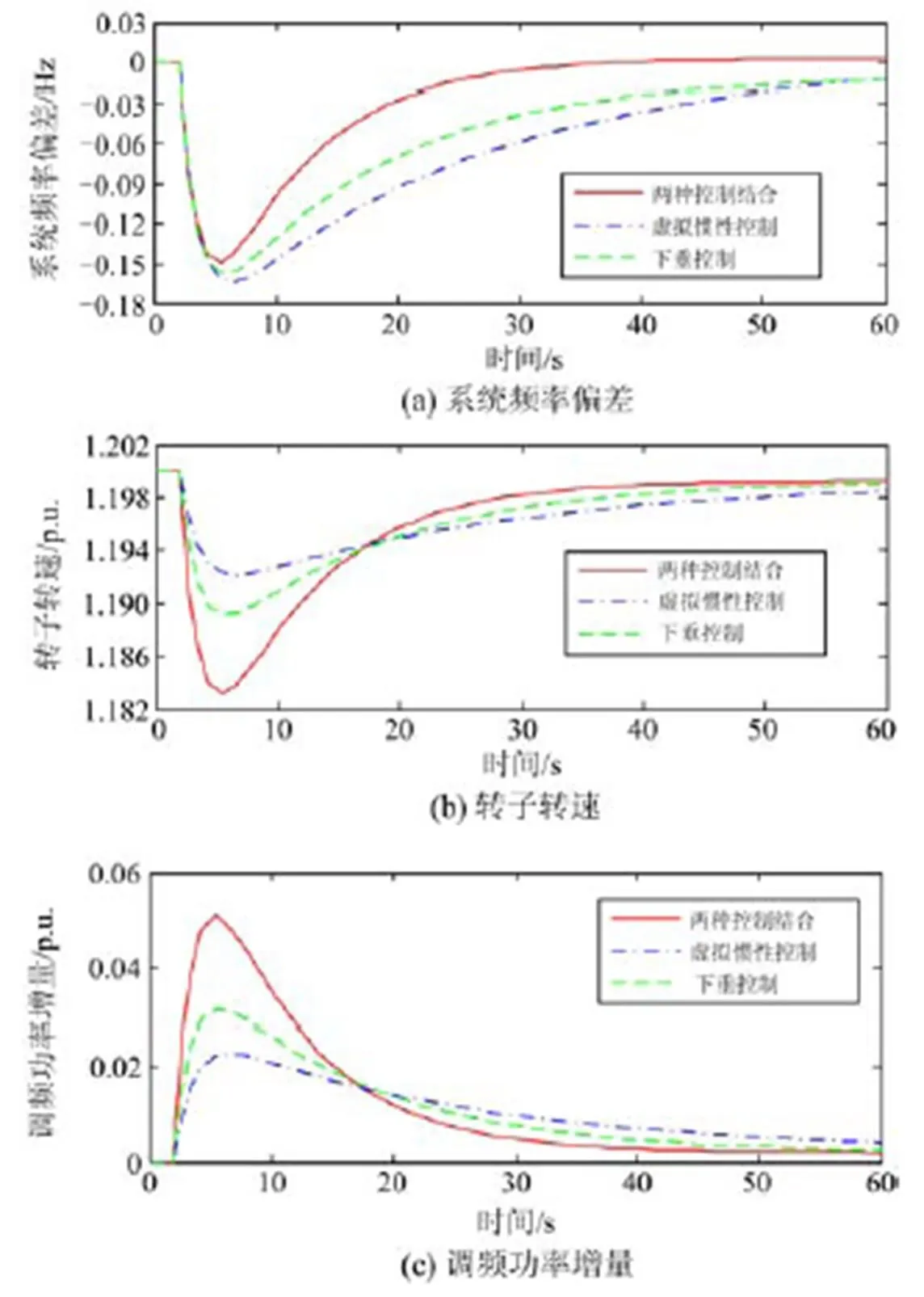
图9 风速11 m/s的DFIG调频输出
图10给出情景三下DFIG的调频输出。在高风速区域,虚拟惯性控制和下垂控制不再起作用,仅由变桨距角控制器控制DFIG调频输出。在变桨距角控制策略中,在高风速区域采取90%最大功率的运行轨迹,负荷扰动接入之前增大桨距角运行度数,如图10 (b)的0时刻。在扰动发生后,减少桨距角,增大风机捕获风能,增加风电输出功率,能够有效地抑制系统频率变化,如图10(a)和(c)所示。在高风速区域转子速度控制不再起调节作用,因此转速始终维持在最大安全运行速度。
综上所述,本文提出的DFIG转子速度控制和变桨距角控制策略,在低载运行的前提下,能够通过改变转子速度和桨距角,增加风机功率输出,起到抑制系统频率波动的作用;在转子速度控制策略中,中风速区域风机可提供的调频功率增量要大于低风速区域;同时,由虚拟惯性控制和下垂控制策略同时起作用时,系统调频效果最好。
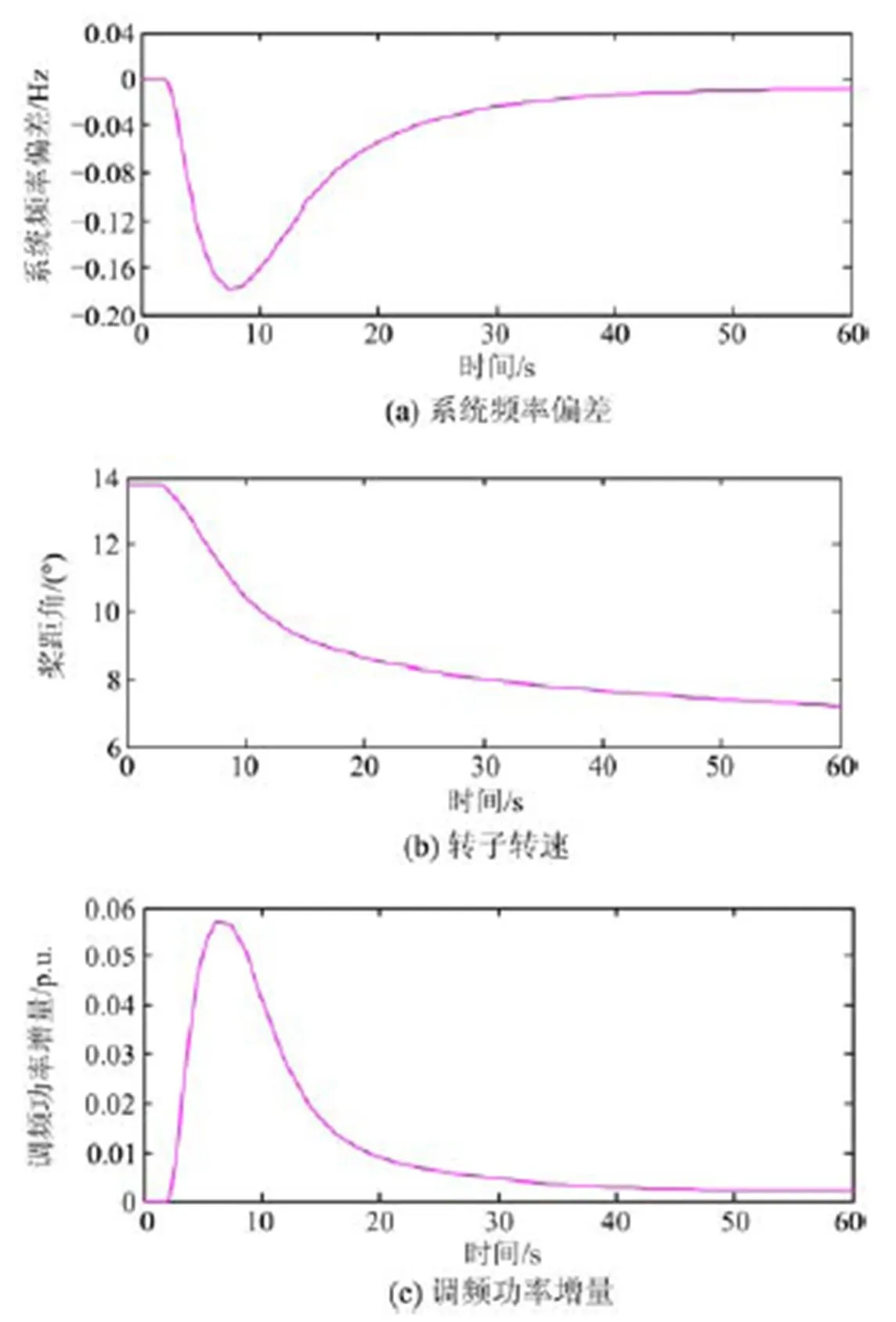
图10 风速14m/s的DFIG调频输出
6.2 电动汽车集群和风电联合调频出力分析
在风电机组参与调频的基础上,联合EV集群参与系统调频。为验证风电和EV集群联合调频的效果,设立情景四、情景五和情景六。情景四和情景五中风电机组和EV集群联合参与调频,其中情景四和情景五的EV集群中EV数量分别为100辆和200辆,其余条件同情景一相同。情景六中风电不再作为调频出力,仅作为阶跃扰动,该情景仅由200辆EV调频出力。

情景一、情景五和情景六调频对比如图12所示。由图12(a)可知,风电和EV集群联合调频出力时,频率偏差最小;风电为扰动,仅EV出力的情况次之;而仅风电出力时,频率偏差最大。这说明风电和EV集群联合调频比风电单独参加频率调整效果要好。图12(b)为相应情景下EV集群调频出力。情景一中不含EV,故EV集群出力为0;情景五中风电和EV均有出力,故EV集群出力少于情景六。因此,风电作为调频机组对系统频率起稳定作用,可以分担系统调频压力;而如果对风电不加以控制,则其作为扰动则会影响系统频率稳定,增加系统调频压力。因此,在风电并网情况下,有必要增加部分风电机组作为调频辅助机组,以维持系统频率的稳定。
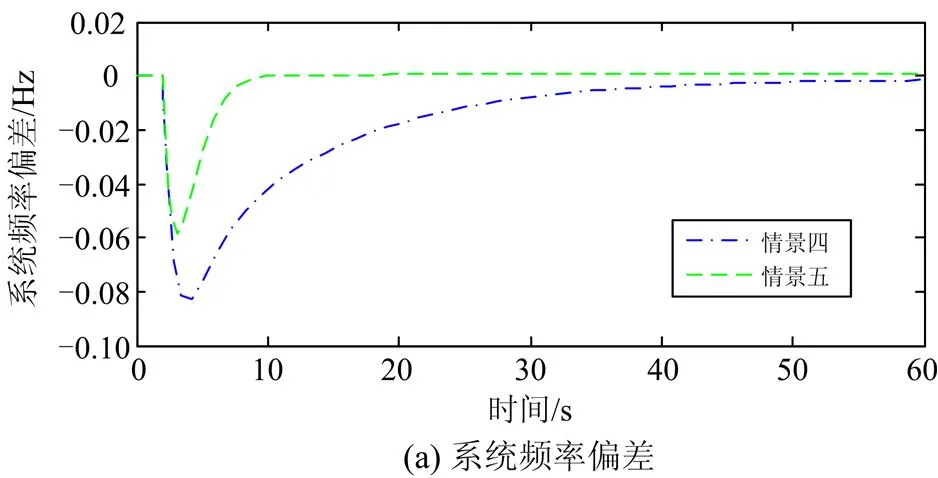
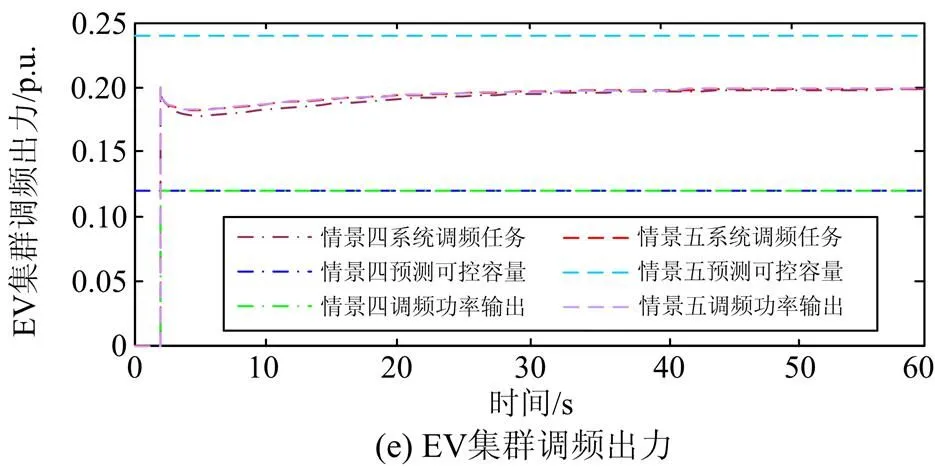
图11 情景四和情景五调频对比
综上所述,本文提出的EV集群和风电联合调频控制策略,其调频效果分别优于风电单独调频出力和EV集群单独调频出力。风电作为调频机组对系统频率起稳定作用,能够分担系统调频压力。而EV集群内部EV数量不同时调频效果也不尽相同,当EV集群调频实时预测可控容量能够满足调频任务需求时,其调频效果优于实时预测可控容量不足的情况。
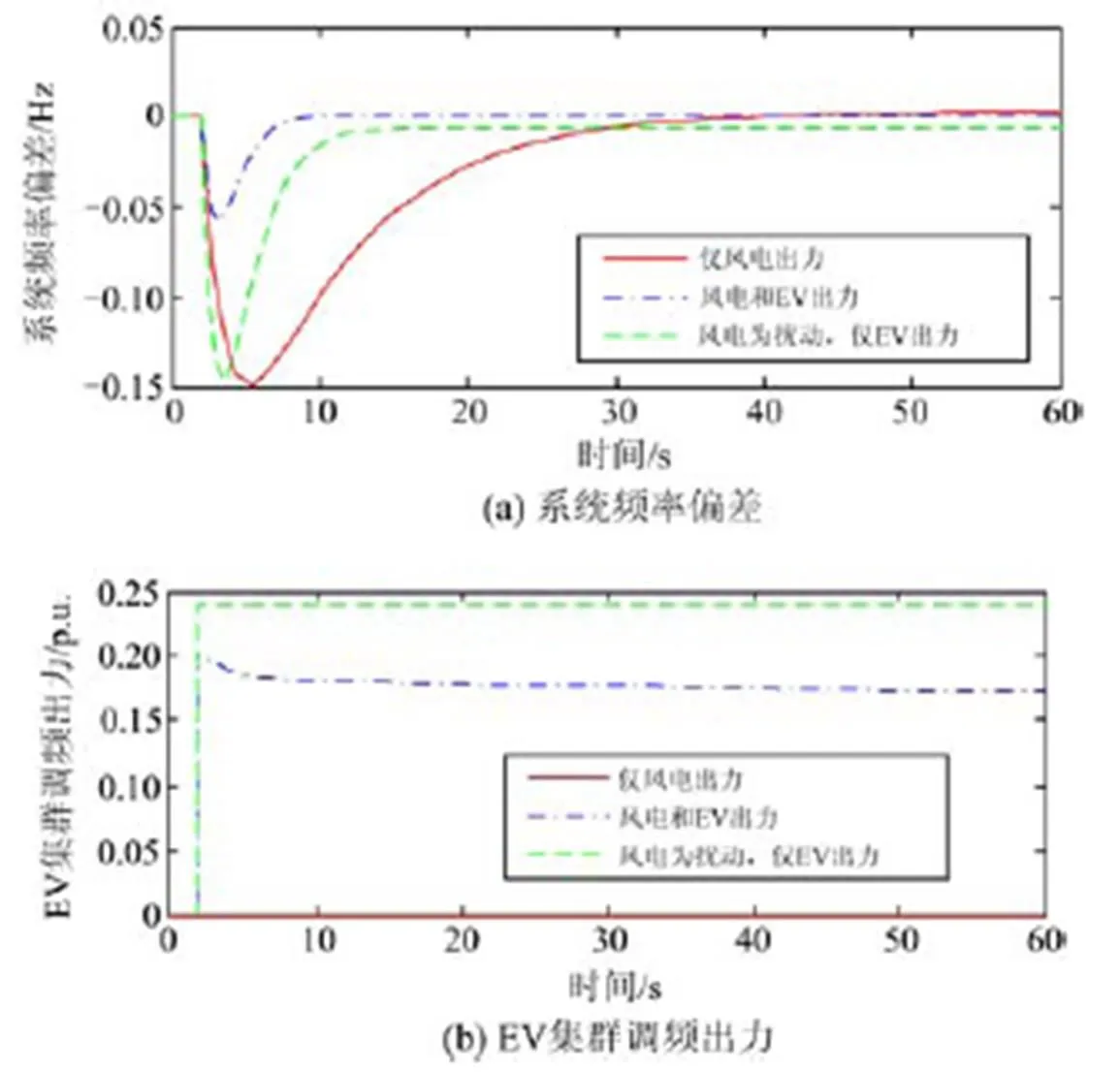
图12 情景一、情景五和情景六调频对比
7 结论
(1) 本文提出的DFIG转子速度控制和变桨距角控制策略,能够有效抑制系统频率波动。而且虚拟惯性控制和下垂控制单独作用时,系统调频效果较差。因此在风电参与调频时,应联合虚拟惯性控制和下垂控制同时作用,才能起到较好的调频效果。
(2) 本文提出的风电和EV集群联合调频控制策略中,风电作为调频机组能够分担系统调频压力,且两者联合调频效果优于风电单独调频出力。
(3) 风电和EV集群联合参与调频时,EV集群内部EV数量越多,可提供的调频可控容量越多,调频效果越好。
[1] 赵嘉兴, 高伟, 上官明霞, 等. 风电参与电力系统调频综述[J]. 电力系统保护与控制, 2017, 45(21): 157-169.
ZHAO Jiaxing, GAO Wei, SHANGGUAN Mingxia, et al. Review on frequency regulation technology of power grid by wind farm[J]. Power System Protection and Control, 2017, 45(21): 157-169.
[2] HAFIZ F, ABDENNOUR A. Optimal use of kinetic energy for the inertial support from variable speed wind turbines[J]. Renewable Energy, 2015, 80: 629-643.
[3] VAN DE VYVER J, DE KOONING J D M, MEERSMAN B, et al. Droop control as an alternative inertial response strategy for the synthetic inertia on wind turbines[J]. IEEE Transactions on Power Systems, 2016, 31(2): 1129-1138.
[4] 李世春, 黄悦华, 王凌云, 等. 基于转速控制的双馈风电机组一次调频辅助控制系统建模[J]. 中国电机工程学报, 2017, 37(24): 7077-7086.
LI Shichun, HUANG Yuehua, WANG Lingyun, et al. Modeling primary frequency regulation auxiliary control system of doubly fed induction generator based on rotor speed control[J]. Proceedings of the CSEE, 2017, 37(24): 7077-7086.
[5] 张冠锋, 杨俊友, 孙峰, 等. 基于虚拟惯量和频率下垂控制的双馈风电机组一次调频策略[J]. 电工技术学报, 2017, 32(22): 225-232.
frequency regulation strategy of DFIG based on virtual inertia and frequency droop control[J]. Transactions of China Electrotechnical Society, 2017, 32(22): 225-232.
[6] 赵冬梅, 许瑞庆, 郑立新. 全风况下双馈风机参与调频的协调控制策略研究[J]. 电力系统保护与控制, 2017, 45(12): 53-59.
ZHAO Dongmei, XU Ruiqing, ZHENG Lixin. Research on coordinated control strategy for DFIGs participating in system frequency regulation with different wind[J]. Power System Protection and Control, 2017, 45(12): 53-59.
[7] ZHAO J, LYU X, FU Y, et al. Coordinated microgrid frequency regulation based on DFIG variable coefficient using virtual inertia and primary frequency control[J]. IEEE Transactions on Energy Conversion, 2016, 31(3): 833-845.
[8] 李军徽, 冯喜超, 严干贵, 等. 高风电渗透率下的电力系统调频研究综述[J]. 电力系统保护与控制, 2018, 46(2): 163-170.
LI Junhui, FENG Xichao, YAN Gangui, et al. Survey on frequency regulation technology in high wind penetration power system[J]. Power System Protection and Control, 2018, 46(2): 163-170.
[9] LI C, AHN C, PENG H, et al. Synergistic control of plug-in vehicle charging and wind power scheduling[J]. IEEE Transactions on Power Systems, 2013, 28(2): 1113-1121.
[10] KOUBA N E Y, MENAA M, HASNI M, et al. A novel optimal frequency control strategy for an isolated wind-diesel hybrid system with energy storage devices[J]. Wind Engineering, 2016, 40(6): 497-517.
[11] PAHASA J, NGAMROO I. Coordinated control of wind turbine blade pitch angle and PHEVs using MPCs for load frequency control of microgrid[J]. IEEE Systems Journal, 2016, 10(1): 97-105.
[12] 高翔. 现代电网频率控制应用技术[M]. 北京: 中国电力出版社, 2010.
[13] MA H T, CHOWDHURY B H. Working towards frequency regulation with wind plants: combined control approaches[J]. IET Renewable Power Generation, 2010, 4(4): 308-316.
[14] 赵晶晶, 吕雪, 胡符杨, 等. 基于可变系数的双馈风机虚拟惯量与超速控制协调的风光柴微电网频率调节技术[J]. 电工技术学报, 2015, 30(5): 59-68.
ZHAO Jingjing, LÜ Xue, HU Fuyang, et al. Frequency regulation of the wind/photovoltaic/diesel microgrid based on DFIG cooperative strategy with variable coefficients between virtual inertia and over-speed control[J]. Transactions of China Electrotechnical Society, 2015, 30(5): 59-68.
[15] ZHANG Q, LIU H, LI C. A hierarchical dispatch model for optimizing real-time charging and discharging strategy of electric vehicles[J]. IEEJ Transactions on Electrical and Electronic Engineering, 2018, 13(4): 537-548.
System frequency regulation strategy of electric vehicle cluster considering wind power grid-connected model
LI Yan1, ZHANG Qian1, LI Chen2, HU Xiqian1
(1. State Key Laboratory of Power Transmission Equipment & System Security and New Technology, Chongqing University, Chongqing 400044, China; 2. EHV Power Transmission Company of China Southern Power Grid, Guangzhou 510620, China)
In order to solve the low reliability of wind turbine frequency support due to the randomness and volatility of wind energy, electric vehicles and wind turbines are combined to participate in the system frequency regulation. Based on the division of wind speed region and the operation characteristics of wind turbine, the virtual inertia control, droop control and pitch angle control are used to establish the frequency regulation model. Combined with the EV cluster control strategy, through the allocation of system frequency regulation demand, the coordinated control strategy of EV cluster and wind power frequency regulation is proposed. The results show that the frequency regulation effect of wind turbines is better when the virtual inertia and droop control work together, and the effect when electric vehicles and wind turbines coordinated to participate in frequency regulation is better than that when wind turbines participate in frequency regulation independently. The simulation proves that the proposed coordinated frequency regulation strategy is able to suppress the frequency deviation, maintaining the system frequency reliability.
This work is supported by National Natural Science Foundation of China (No. 51507022).
electric vehicle; wind turbine; coordinated frequency regulation; virtual inertia control; droop control; pitch angle control
2018-07-29;
2018-08-27
李 嫣(1995—),女,硕士研究生,研究方向为电动汽车与电网互动技术;E-mail: liyanly@cqu.edu.cn
张 谦(1980—),女,通信作者,博士,副教授,研究方向为电力市场与电力系统安全经济运行、电动汽车与电网互动技术。E-mail: zhangqian@cqu.edu.cn
国家自然科学基金项目(51507022)