基于iGMAS的南极地区GNSS服务性能评估
2018-09-28乐四海杨建雷
乐四海,杨建雷
(1.北京卫星导航中心,北京 100096;2.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081)
0 引言
随着科技的发展,各国逐渐将战略布局部分转移到南极地区,导致南极地区的科研活动日益增多,GNSS的使用也会更加频繁。21世纪初,美俄两国先后在南极中部与东部地区建立了小型GNSS监测站,并在以后几年内取得了一定的成果[1]。南极地区的GNSS服务性能至关重要,直接影响着南极地区科研活动的安全性以及便利性,主要包括定位精度、测速精度以及服务连续性3个方面[2]。
关于如何处理监测数据,美俄两国早些年使用传统的仪器监测方法,人工对仪器数据进行记录并分析,这种方法运行效率低、结果精度差。近几年,全球卫星导航协会提出了iGMAS平台,是进行导航卫星信号质量以及服务性能监测的重要平台,特点是自动化程度高、结果精度高[3]。国外相关学者已经使用iGMAS平台做过很多监测评估工作,效果非常不好。同时,国内一些研究机构的学者也投入到iGMAS平台的测试中,其中,中国电科第五十四研究所在iGMAS方面的研究位居国内领先地位。
前几年,我国在南极中山地区设立了GNSS监测站,通过分析南极监测站的卫星数据,即可得出南极地区GNSS的服务性能。因此,借助iGMAS平台对南极地区的GNSS服务性能进行监测评估,对导航信号监测领域有着重要的价值[4]。本文通过iGMAS平台对定位精度、测速精度以及服务连续性这3个方面进行研究,并给出了相应的仿真结果和结论。
1 iGMAS平台
iGMAS监测评估中心是对卫星导航系统运行状况和主要性能指标进行监测和评估,生成高精度精密星历和卫星钟差、地球定向参数、跟踪站坐标和速率、全球电离层延迟等产品的信息平台[5]。其主要任务是建立导航卫星全弧段、多重覆盖的全球实时跟踪网,以及相应的数据采集、存储、分析、管理和发布等信息服务平台,提供卫星导航系统的共享数据与产品,支持技术试验、监测评估、科学研究和专业应用等[6]。
iGMAS监测评估中心也是对导航卫星的信号质量以及信息质量进行监测评估的一套综合平台,它以星座状态监测评估、导航信号质量监测评估、导航信息监测评估和导航服务性能监测评估四大任务为主线,以iGMAS跟踪站、大天线和通信网络等为基础,以信息采集处理分析评估、信号采集监测评估、时间同步处理及监测为手段,按照监测评估中心的标准设计数据及信号的采集、传输、存储、处理和评估系统,具有不间断连续运行的能力,为大总体及其他分类用户提供不同等级的监测评估产品,服务于北斗系统的建设与运行[7]。
整个监测评估中心主要包括:15 m大口径定向天线、全向天线信号质量监测设备、2.4 m天线、跟踪站接收机设备、数据分析评估显示设备、授时监测接收机、共视接收机、本地原子钟组、数据存储与管理设备、数据处理与评估服务器、综合显示与输出等设备等[8]。iGMAS监测评估中心的框架如图1所示。
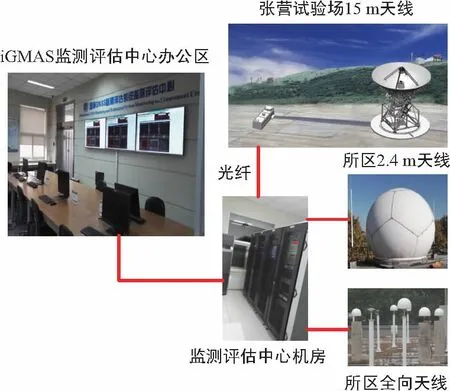
图1 iGMAS监测评估中心的框架
2 服务性能评估模型
2.1 定位精度
定位精度是指用户在定位过程中,系统提供给用户的位置与用户的真实位置之差的统计值,包括水平定位精度和垂直定位精度[9]。
利用观测数据,对GNSS的定位精度进行评估的步骤如下:
① 通过读取观测文件获得观测历元时间、卫星数目、卫星号以及对应的观测数据信息;
② 计算历元时刻的卫星位置,计算出卫星到测站的距离,并计算卫星高度角和方位角,利用高度角判断条件统计可见卫星数,紧接着计算对流层、电离层、相对论效应等引起的延迟;
③ 构造方程求解[10]。
基于实际观测值,伪距观测方程的误差可表示为[11]:
(1)

基于式(1),定位精度均方根误差计算公式为[12]:
(2)
式(2)可用来计算单一测试点的伪距定位精度。当有多个测站时,分测站统计。
2.2 测速精度
测速精度是指用户在测速过程中,系统提供给用户的速度与用户真实速度之差的统计值[13]。
利用观测数据,对GNSS的测速精度进行评估的步骤如下:
① 读取观测数据,读取每一历元的卫星个数以及对应的卫星号;
② 通过卫星信号发射时刻计算出卫星在对应时刻的位置和速度,当然也可以直接利用精密星历直接读取卫星位置和速度;
③ 提取观测文件中的多普勒频移观测量,通过最小二乘卡尔曼滤波算法求解用户的速度;
④ 最后对解算结果进行评估,测速结果以0速度为基准[14]。
基于实际的观测数据,伪距率观测方程的误差表示形式为[15]:
(3)

基于式(3),测速精度均方根误差计算公式为[16]:
(4)
2.3 服务连续性
服务连续性是指在一段时间内和服务区域内,卫星导航系统提供连续服务性能的能力[17]。
假设在第L个地区,测试时间段为[tstart,tend],用户机采样间隔记为T,则系统服务的连续性指标Conl的计算公式为[18]:
(5)
式中,若k时刻,定位误差EPEk≤fAcc,则布尔函数取1,否则取0。对于卫星导航系统,一般统计每小时系统服务的连续性指标,即常取Top=1 h。
式(5)可用来计算单一测试点定位精度的连续性,若统计整个服务区内系统服务精度的连续性,则需统筹考虑覆盖区内测试点在时间和空间上的相关性,以加权计算方法来统计覆盖区内服务连续性,其计算公式为[19]:
(6)
式中,an为每个区域采集的有效数据个数。
实际工程中,服务连续性又分为定位连续性与测速连续性。定位连续性是指卫星导航系统能够提供连续定位的能力,测速连续性是指卫星导航系统能够提供连续测速的能力[20]。
3 南极地区服务性能评估
对从长沙数据中心传过来的广播星历进行处理,将各个监测站的多颗可见的导航卫星按小时进行合并,并将南极中山站的广播星历提取出来,然后进行定位精度、测速精度以及服务连续性的仿真。
3.1 定位精度仿真结果
使用iGMAS对南极中山站1天内每小时的定位精度进行计算,并使用Matlab对E,N,U三个方位的定位精度进行仿真,定位精度测试结果如图2所示。
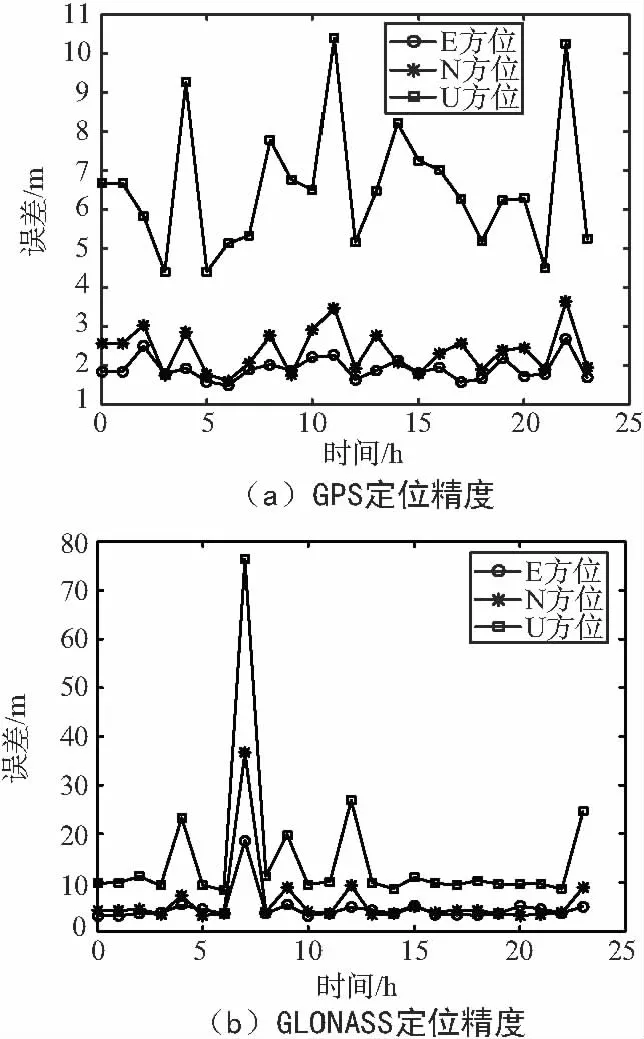
图2 定位精度测试结果
从图2可知,GPS与GLONASS的E,N方位的定位误差比较小,而且变化趋势基本一致,U方位的定位误差比较大,但是与E,N方位定位误差的变化趋势相一致,这是由于定位时的伪距测量量对E,N,U三个方位的影响是一致的,并且由于U方位的误差受高程地图的影响,所以定位误差较大。
3.2 测速精度仿真结果
使用iGMAS对南极中山站1天内每小时的测速精度进行计算,并使用Matlab对E,N,U三个方位的测速精度进行仿真,测速精度测试结果如图3所示。

图3 测速精度测试结果
从图3可知,GPS与GLONASS的E,N方位的测速误差比较小,而且变化趋势基本一致,U方位的测速误差比较大,但是与E,N方位测速误差的变化趋势相一致,这是由于定位时的伪距测量量对E,N,U三个方位的影响是一致的,并且由于U方位的误差受高程地图的影响,所以测速误差较大。
3.3 服务连续性仿真结果
使用iGMAS对南极中山站1天内每小时的定位精度与测速精度进行计算,并设置好定位误差与测度误差的门限,滑动窗口统一设置为3,然后使用Matlab对E,N,U三个方位的定位连续性与测速连续性进行计算,如表1所示。

表1 服务连续性测试结果
从表1中可以看出,E,N方位的连续性整体上要好于U方位的连续性,这是由于E,N方位的定位误差比较平稳,而U方位的定位误差波动较大造成的;GPS的定位连续性与测速连续性均要好于GLONASS,这是由于GPS的星座比GLONASS完善,定位性能好。通过服务连续性,可以看出导航系统连续提供正常服务的性能。
4 结束语
通过使用iGMAS平台对南极中山站的导航数据进行分析,可以得出定位精度、测速精度与服务连续性的仿真结果。通过对仿真结果进行分析可以得出结论:E,N方位的定位与测速误差比较小,U方位的定位与测速误差稍大,但均符合相关标准;定位与测速连续性均达到指标要求。由此可得,南极地区GNSS服务性能达到相关要求,可为科研活动提供有效保障。
