一种雷达伺服系统的积木式组合解决方案
2018-09-28,,
,,
(南京恩瑞特实业有限公司,江苏 南京 211106)
0 引言
雷达伺服系统面临着驱动形式繁多、开发周期短、多种安装方式、低成本和免维护等实际需求的严峻挑战[1-2]。已公开文献中,雷达伺服系统组成架构可分为上位机+主控板+伺服驱动器[3],上位机+PLC/PCC+伺服驱动器[4],上位机+扩展模块+伺服驱动器[5],双机备份系统[6]等。上述各种雷达伺服系统在形式上都属于彼此独立的平台,使用场合单一,接口不统一,甚至每种雷达就对应一套专有伺服系统,这对于民用雷达实现敏捷开发,形成广泛的谱系产品快速推向市场,和后续统一维护都带来一定的不利。为此,在深度梳理雷达产品的多样化需求基础上,采用统一的ARM+CPLD/FPGA控制平台和逆变电路组成的功率平台,统一的内部接口和外部控制总线接口,统一的软件平台,设计了一种可以通过通用化模块彼此互相组合、灵活扩展的雷达伺服系统解决方案。
1 硬件架构与组成
基于模块化、通用化设计思想和互换性原则,系统共由4种PCB模块组成,每种PCB为一个独立的功能单元,通过相互的组合、互联,形成不同的配置产品,实现相应的功能需求。
1.1 通用主控模块
通用主控模块架构如图1所示。硬件上既可以做伺服驱动器主控,也可作运动控制器,或者两者功能兼做。通用主控模块主要由Cortex-M4内核的ARM处理器STM32F407和Altera公司的FPGA芯片EP4CE10F17C8N构成控制核心。ARM负责所有控制算法的软件实现和接口外设驱动,FPGA主要负责编码器或旋变信号的解码、模拟量采集,以及PWM硬件保护。FPGA与ARM之间的通信采用高速FSMC总线连接,同时ARM向FPGA传输原始PWM控制信号。当主控模块作为电机驱动器主控时,通过CAN接口或者上位机方位/脉冲输入接口接收来自运动控制器的速度、位置指令,ARM执行PWM控制信号周期中断,触发FPGA同步采集电机驱动模块的模拟信号,并通过FSMC总线从FPGA读取电压、电流采样值、电机转速和电角度,对电机的控制采用位置环-速度环-电流环三闭环控制,针对不同电机采用不同的软件算法,产生新的PWM控制信号并输入至FPGA,FPGA对新的PWM信号和外部控保信号进行逻辑综合,输出至多相PWM接口并驱动功率级电路。当主控模块作为运动控制器时,通过以太网或者串口接收来自上位机(在雷达系统中通常为数据处理机)的工作模式指令,经过加减速、插补等运动控制算法,转化为实际电机控制指令,利用CAN总线传输至电机驱动器,对电机进行速度或位置控制。通用主控模块主要用于机柜安装的场合。
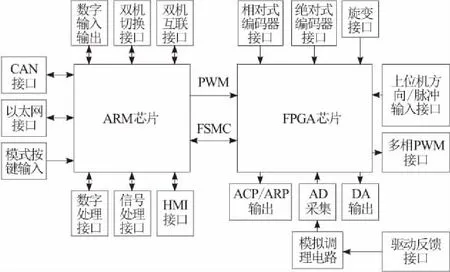
图1 通用主控模块硬件架构
1.2 通用低压驱动模块
通用低压驱动模块架构如图2所示。该模块硬件上兼容直流有刷电机、直流无刷电机、步进电机和永磁同步电机的驱动,主要由MOS驱动电路和MOSFET构成的四相逆变器,以及相应的隔离电路、模拟量采集调理电路组成。该模块通过多相PWM接口接收来自通用主控模块发出的PWM信号,通过MOS驱动电路进行门级驱动,然后经MOSFET功率放大。对于直流有刷电机,采用H桥驱动拓扑;对于步进电机,采用双H桥驱动拓扑;对于直流无刷电机以及永磁同步电机,采用三相全桥逆变驱动拓扑。通用低压驱动模块主要用于机柜安装的场合。
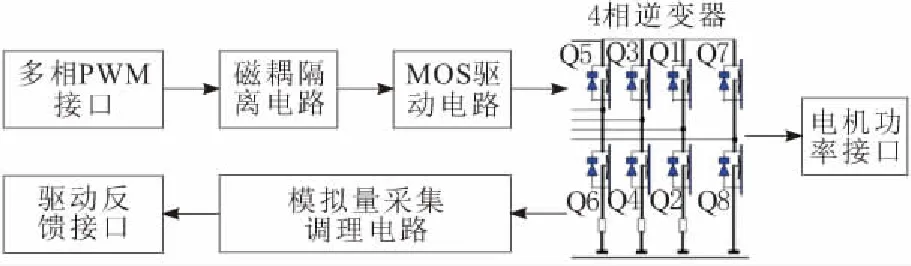
图2 通用低压驱动模块硬件架构
1.3 通用高压驱动模块
通用高压驱动模块架构如图3所示。该模块由市电供电,经过不可控整流电路将交流电整流为直流母线,软启动电路可消除冷机启动带来的电容冲击。通用高压驱动模块接收来自通用主控模块的三相PWM信号,通过IPM功率模块实现对交流供电的永磁同步电机的功率驱动。同时,由于电机的频繁制动会带来泵升电压导致母线过压,设计动态制动电路通过IGBT进行斩波制动,由制动电阻进行高压泄放。通用高压驱动模块主要用于机柜安装的场合。

图3 通用高压驱动模块硬件架构
1.4 小型化伺服模块
小型化伺服模块架构如图4所示。在小型化伺服模块中,控制板和驱动板上下叠放,之间通过电气插针连接和传递信号。控制板在通用主控板基础上做了简化和小型化处理,主要由小型化ARM处理器STM32F103和Altera公司的CPLD芯片EPM240T100I5N构成控制核心,CPLD与ARM之间采用SPI通信,同时ARM向CPLD传输原始的PWM控制信号。驱动板主要由磁耦隔离电路、MOS驱动电路和MOSFET构成的三相全桥逆变器组成。整个模块通过RS485接口或者CAN接口接收来自上位机运动控制指令,并通过CANopen协议实现多轴伺服运动同步。该模块可在天线内部嵌入式安装,适用于小型化、便携式雷达产品,省去了外部控制箱和汇流环的布设。

图4 小型化伺服模块硬件架构
2 模块组合形式
针对不同的需求场景,通用主控模块能够与通用低压驱动模块、通用高压驱动模块和小型化伺服模块进行“积木式”组合,可以实现3大系列、9种类型。
2.1 低压伺服驱动器
低压伺服驱动器用于直流36~48 V供电,功率在800 W以内的伺服驱动。有以下3种组合类型。
a.机柜安装式单轴低压控制驱动一体化:由1个通用主控模块和1个通用低压驱动模块组合而成。其中,通用主控模块在功能上兼做与上位机接口的运动控制器和电机驱动器的主控,电机可根据需求选择直流有刷电机、直流无刷电机、步进电机和永磁同步电机,配合相应的驱动软件。通用主控模块通过以太网或者RS422串口与上位机(通常为雷达数据处理机)进行通信,获取工作模式指令,并转化为实际的电机伺服控制。
b.机柜安装式单轴低压驱动器:由1个通用主控模块和1个通用低压驱动模块组合而成,电机可根据项目需求选择直流有刷电机、直流无刷电机、步进电机和永磁同步电机,并配合相应的驱动软件。通用主控模块在功能上作为电机驱动器主控,可通过差分的方向/脉冲信号接收来自第三方运动控制器(如PLC或HMI)的运动控制指令。
c.嵌入式安装单轴低压驱动器:由1个小型化伺服模块单独组成,电机可根据项目需求选择、直流无刷电机或永磁同步电机,并配合相应的驱动软件。该模块可以通过CAN总线或者RS485串口接收来自第三方运动控制器的运动控制指令。
2.2 高压伺服驱动器
高压伺服驱动器由1个通用主控模块和1个通用低压驱动模块组合而成。此配置连接针对交流供电,功率在2 000 W以内的交流伺服电机驱动,面向中等功率的单轴或者多轴雷达系统,机柜安装。其中,通用主控模块在功能上作为电机驱动器主控,可通过差分的方向/脉冲信号接收来自第三方运动控制器的运动控制指令。
2.3 多轴总线式雷达伺服系统
基于CAN总线的CANopen协议[7],可与自研或者第三方的驱动器构成总线伺服系统,实现任意功率等级的多轴雷达伺服系统,具有很高的可扩展性。能够与切换控制系统联合实现双机冗余备份。以具有普遍意义的双轴(方位轴、俯仰轴)雷达天线为例,有以下几种配置类型。
a.使用第三方驱动器的单机雷达伺服系统:由1个通用主控模块通过CANopen协议与第三方驱动器相连,实现双轴控制系统。其中,通用主控模块在功能上作为运动控制器,并通过以太网或者RS422串口与上位机通信,获取工作模式指令,并转化为各个轴的电机伺服指令。
b.使用机柜式安装自研低压驱动器的单机雷达伺服系统:由1个通用主控模块通过CANopen协议与2个机柜安装式单轴低压驱动器相连,实现双轴控制系统。通用主控模块在功能上作为运动控制器。
c.使用嵌入式安装自研低压驱动器的单机雷达伺服系统:由1个通用主控模块通过CANopen协议与2个嵌入式安装的单轴低压驱动器相连,实现双轴控制系统。通用主控模块在功能上作为运动控制器,通过以太网或者RS422串口与上位机通信,转化为各个轴的伺服指令。
d.使用自研高压驱动器的单机雷达伺服系统:由1个通用主控模块通过CANopen协议与2个自研高压驱动器相连,实现双轴控制系统。通用主控模块在功能上作为运动控制器。
e.双机备份雷达伺服系统:对于高可靠要求的应用场合,可以采用室内伺服系统双机冗余、天线座电机单机的配置方案,此时需要与切换控制系统配合实现。以一路(方位或者俯仰)为例,双机分别为A机和B机,A机、B机的通用主控模块分别通过双机切换接口与切换控制系统相连接,并传递切换控制指令,通用主控模块之间通过双机互联接口相连接并实时备份当前的工作状态。可通过上位机软件命令,或者故障分机主动发起分机的切换,并且切换后工作模式能够接续。
3 系统搭建及应用验证
经过两轮设计、加工、调试定型后,通用主控模块、通用低压驱动模块、通用高压驱动模块PCB板的实际尺寸为252 mm×156 mm,可安装于4U机柜插箱内;小型化伺服模块上下叠放的PCB占用空间尺寸120 mm×80 mm×40 mm,可借助外壳定位安装于天线座内。4种模块最终实物如图5所示。
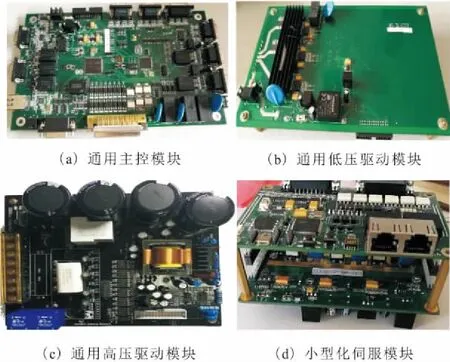
图5 4种模块实物
以某型号船用导航雷达为实验平台,验证模块的组合、功能及性能指标。该雷达伺服系统选用48 V直流供电、额定功率600 W的永磁同步电机,2 500线光电编码器反馈,天线座角码采用绝对式编码器,伺服系统机柜式安装。伺服系统采用速度控制模式,指标要求速度环带宽不低于20 Hz,速度控制精度<10%。
伺服系统采用自主研制,配置为机柜安装式单轴低压控制驱动一体化,由1个通用主控模块和1个通用低压驱动模块组合而成,通用主控模块在上,通用低压驱动模块在下,结构上通过4个螺柱相固联,电气上采用排线互联,安装在室内机柜中,通过电缆连接至室外天线座。组合系统及雷达系统安装如图6所示。

图6 组合系统及雷达系统实物
在完成电流环、速度环控制参数整定之后,为了验证系统性能,分别给定电机10 Hz和20 Hz,幅值为1 500 r/min的正弦波速度,利用在线示波器工具JScope抓取实时给定及反馈速度波形,如图7所示。
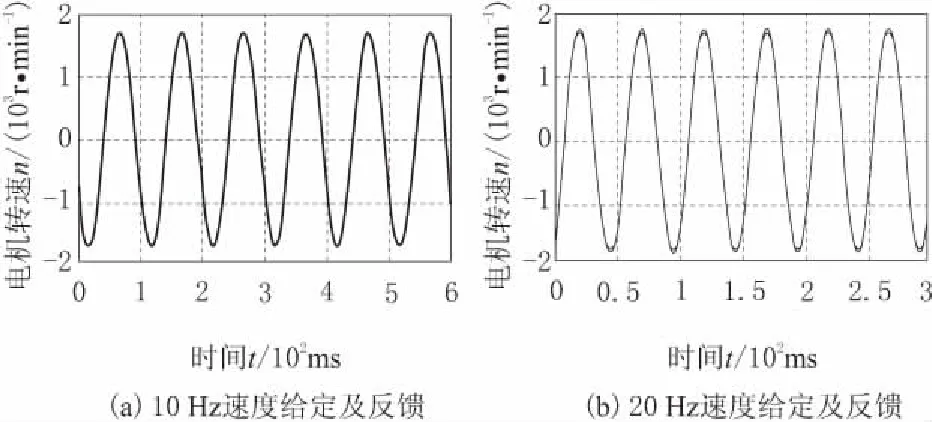
图7 速度给定与反馈波形
实验结果可知,10 Hz的情况下,速度给定及反馈曲线几乎吻合;20 Hz的情况下,给定与反馈相移不明显,速度偏差约为3%,实验结果完全满足性能指标,目前运行状况良好。
4 结束语
以能够模块化组合的雷达伺服系统为研究对象,提出了一种基于ARM和CPLD/FPGA的PCB模块的系统化解决方案,在统一软件平台基础上,通过简单的硬件“积木式”互联,组合成具有不同功能的产品。所有模块均已开发实现,并且以某型号船用导航雷达产品为载体进行了系统搭建,验证了其功能和性能指标。通过研究和实际应用证明,该系统所具备的通用性和互换性可大幅度降低开发及维护成本,降低系统配置复杂度,具备可观的降本增效价值和极为广阔的应用推广前景。
