单模态驱动的V形板结构直线超声电机
2018-09-28,,
,,
(南京航空航天大学机械结构力学及控制国家重点实验室,江苏 南京 210016)
0 引言
直线超声电机是利用压电陶瓷逆压电效应和弹性体超声振动的新型压电致动器,在航空航天、武器装备和精密仪器等领域有着广泛的应用[1-3]。
目前,直线超声电机的研究主要是围绕定子的结构设计展开的[4],旨在提高定子振动能量的利用效率和电机的输出功率。1998年,Kurosawa等[5]利用2个兰杰文振子设计了一种V形直线超声电机,该电机具有良好的输出特性,它的研究受到了关注。2009年,姚志远等[6]采用连续变截面杆对V形电机进行了改进,进一步提高了电机的输出效率。2015年,简月等[7]通过提高夹持系统的切向刚度,增加了V形电机结构的稳定性和输出力。根据工作时同时参与的模态数目来分类,上述电机均属于双模态超声电机,它需要2个工作模态同时被激发,因此对模态频率一致性要求较高,大大降低了电机设计的灵活性。采用单模态驱动则不存在上述问题。2015年,陈乾伟等[8]提出了一种单模态驱动的V形电机,将导轨相对于V形定子倾斜安装,通过单独激发定子的对称或反对称模态,实现电机的正反向运动。然而,这种倾斜安装导轨的方式使得电机装配复杂、空间利用效率低,并且电机的输出功率也亟待提高。
为解决双模态超声电机模态频率一致性要求高,以及单模态V形直线超声电机装调困难、输出功率低等问题, 提出一种利用2个板结构振子构造V形定子的单模态直线超声电机。
1 电机结构和工作原理
V形板结构直线超声电机的结构如图1所示。该电机由底座、直线导轨、定子和预压力施加装置组成。定子呈V形板状结构,由2个相互垂直的矩形板振子构成,定子结构的爆炸视图如图2所示。定子前端盖2个相互垂直的端面上均加工有螺纹孔,通过2根螺栓将后端盖、夹持、压电陶瓷片和电极片紧固为一体,构成一个夹心式压电振子。这种夹心式压电振子利用压电陶瓷的d33效应,具有较强的机电耦合性,可以有效提高电机的能量转换效率和输出性能。两振子关于前端盖的正对角线轴(图3)对称,驱动足位于前端盖顶点处,且前端盖上设有一底边为圆弧的三角形通槽,从而在前端盖的端面到驱动足之间形成了横截面积连续收缩的变截面梁。连续的变截面梁不会造成能量传播的损失[6],通过采用渐进收缩的变截面梁结构,能够放大驱动足处的振幅和提高振速,将超声能量集中到驱动足上,实现聚能作用。
由图2可以看出,每个压电振子配置8片压电陶瓷片,分为2组安置在夹持元件两侧,每组有4片压电陶瓷。压电陶瓷片沿厚度方向极化,每组陶瓷片关于夹在其中间的电极片对称布置,且上下极化方向相反,即每组陶瓷片一侧同时收缩时,另一侧同时膨胀;反之亦然,以激发振子的弯曲振动。将位于同一振子上的两电极片用导线连接,分别构成定子的A,B相,金属端盖和夹持元件接地处理。

图1 V形板结构直线超声电机的结构
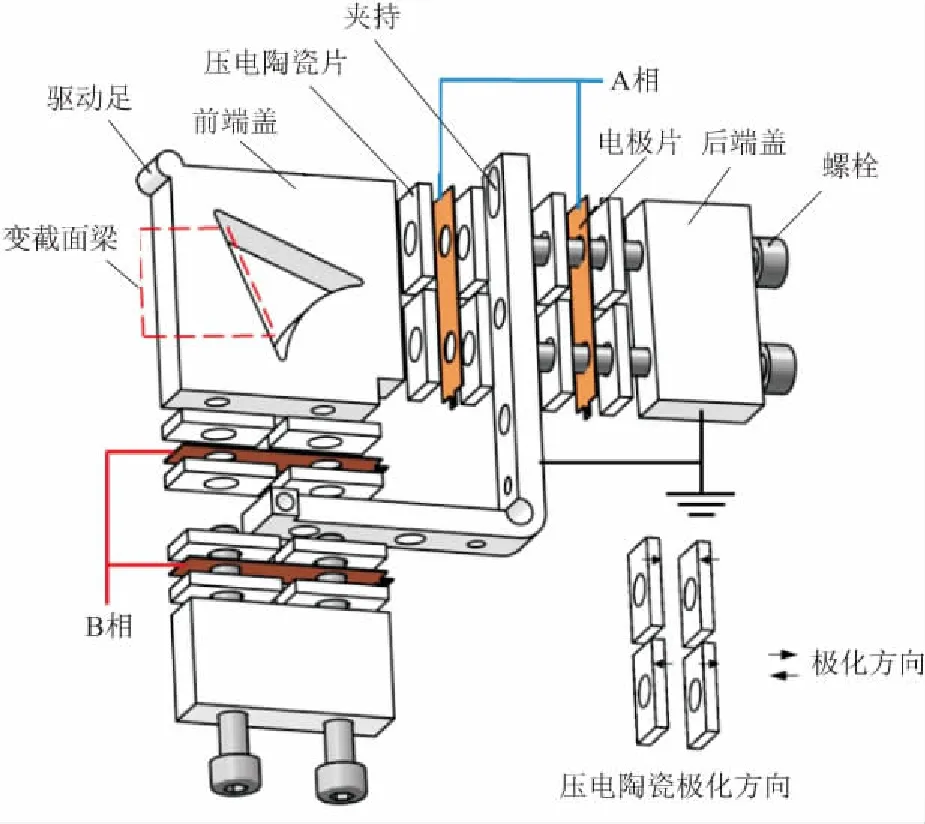
图2 定子结构
直线导轨用螺栓直接固定在底座上,定子通过夹持元件固定在底座上,且其中一个振子与导轨平行安装,使得电机结构更加紧凑,提高了电机空间利用率。夹持的一端通过螺栓铰支在底座上,另一端通过预压力弹簧使驱动足紧压在陶瓷条上,通过调节预压力弹簧的压缩量控制法向预压力的大小。这种一端铰支的夹持方式理论上具有无穷大的切向(沿导轨运动方向)刚度[9],满足法向刚度适中,切向刚度充分大的夹持设计原则[7,10],有利于提高电机的稳定性和输出特性。
1.2 工作原理
该电机采用单模态驱动方式,分别利用如图3所示的反对称和对称模态,以实现电机的双向运动。借助有限元软件ANSYS,对定子采用SOLID186单元进行网格划分,在自由边界条件下计算得到的振动模态如图3所示。反对称和对称模态的固有频率分别为26.72 kHz和37.74 kHz。两振子做反相一阶弯曲振动时形成定子的反对称模态(图3a),两振子发生同相二阶弯曲振动时形成定子的对称模态(图3b)。板结构振子的低阶弯曲振动易于激发且具有较高的振动效率,有利于设计出大功率的直线超声电机。此外,振子一阶弯振的波腹和二阶弯振第2个半波的波腹位置较为接近,因此在该位置附近安置夹持和压电陶瓷片,可使用同一套压电陶瓷片有效地激发定子的对称和反对称模态,并降低夹持对定子工作模态的影响。
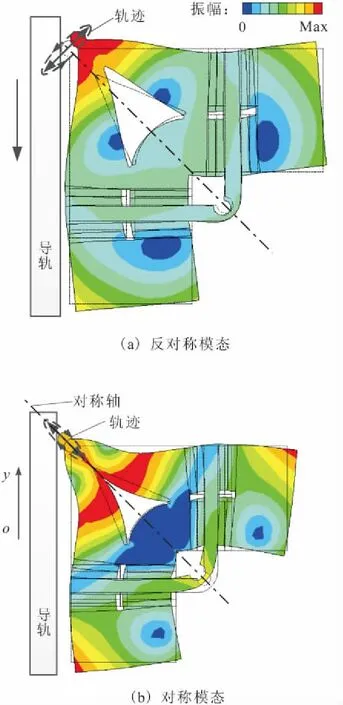
图3 定子工作模态
在驱动足不与导轨接触的情况下,对定子的A,B两相施加相位差为π的正弦激励信号,激发定子的反对称模态,驱动足将沿垂直于定子对称轴的方向做往复直线运动。实际上,驱动足在预压力的作用下与导轨接触时会发生弹性变形,驱动足上接触点的运动轨迹将变成一个倾斜的扁平椭圆轨迹[11- 12]。接触点的椭圆运动单向地间歇驱动导轨,进而实现导轨沿-oy方向(图1)的连续滑移。同理,对定子A,B两相施加相位差为0的正弦激励信号,激发定子的对称模态,此时驱动足表面接触点在接触状态下产生反向的椭圆运动,从而推动导轨沿 +oy方向做直线运动。
2 实验研究
2.1 振动测试实验
为验证设计的可行性,加工制作的样机如图4所示,定子质量为170.8 g。
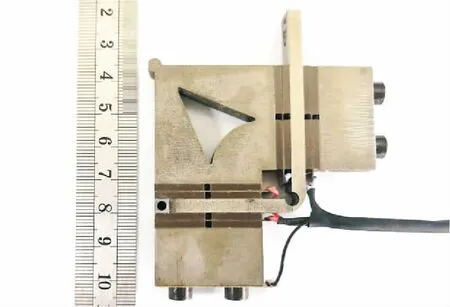
图4 样机照片
采用德国Polytec公司生产的PSV-500F-B型多普勒激光测振仪对样机进行振动测试实验,搭建的振动测试平台如图5所示。图5中,o-xyz为测试坐标系,ox为驱动足法向,oy为切向。首先对定子进行扫频测试。在驱动足上选择一点P作为测试点测试定子的频响特性曲线。在给定子A,B两相施加相位差为π或0的峰峰值为100 V的激励电压下,定子各振动分量的频响特性曲线如图6所示。由图6可知,在各扫频范围内,定子的频响特性曲线分别出现共振峰值,对应的频率即为反对称模态共振频率f1(26.328 kHz)和对称模态共振频率f2(38.05 kHz),与有限元计算的结果接近。
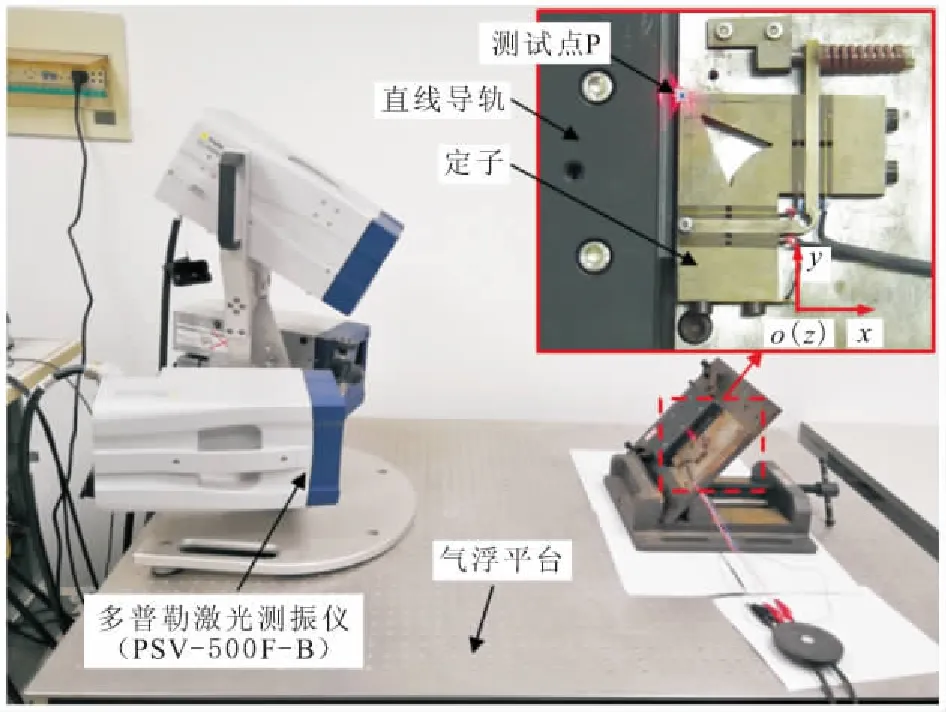
图5 振动测试实验平台

图6 定子频响特性曲线
接着分别对定子在共振频率f1和f2下进行定频实验,测定工作模态振型。在定子两较长的直角边线附近选择一条折线作为测试线,如图7a所示。振型测试结果如图7b和7c所示。图7b表示两振子做反相弯曲振动即为反对称模态,图7c表示两振子做同相弯曲振动即为对称模态,测试的振型与图3中理论计算的振型一致。
文献[12]利用点接触理论模型解释了单模态驱动的超声电机的运行机理。文章指出,在定、动子接触状态下,单模态驱动的超声电机驱动足处的轨迹为具有一定倾斜角度的扁椭圆,但尚未得到实验验证。为测试驱动足与导轨接触时运动轨迹的变化,对定子施加峰峰值为100 V的激励电压,分别在不施加预压力和施加100 N预压力的情况下,借助激光测振仪测试P点在反对称和对称模态下的运动轨迹,如图8所示。由图8可知,驱动足在不接触导轨的情况下,其运动轨迹为一条倾斜的直线;当驱动足在预压力的作用下与导轨保持接触时,驱动足各振动分量的振幅和相位发生了变化,运动轨迹变成了一个长短轴之比较大的斜椭圆,且对称和反对称模态下驱动足的椭圆运动方向相反,这2个椭圆轨迹分别用于驱动导轨沿2个相反的方向运动。
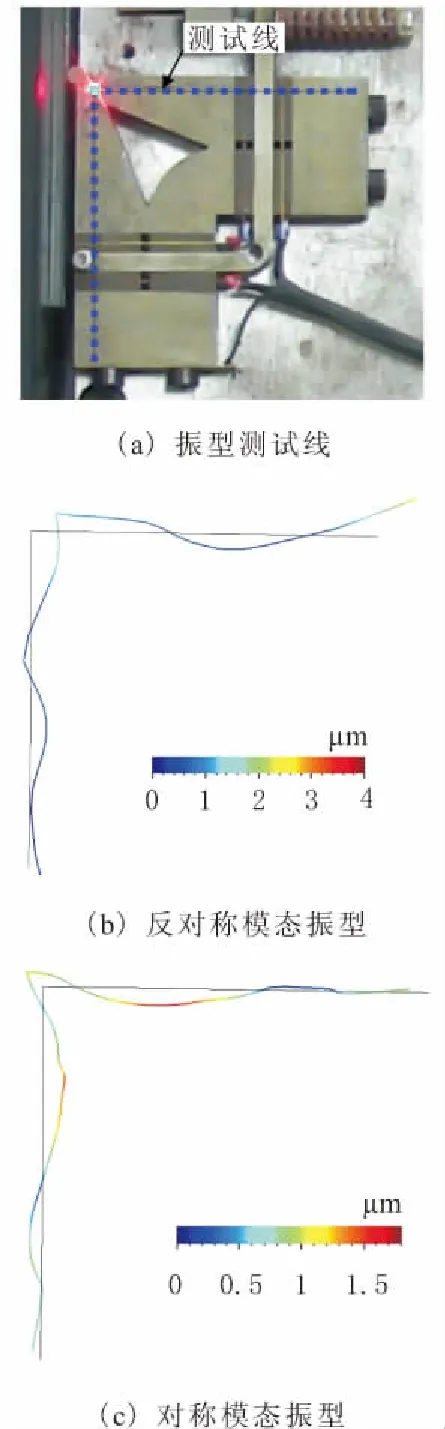
图7 定子振型测试
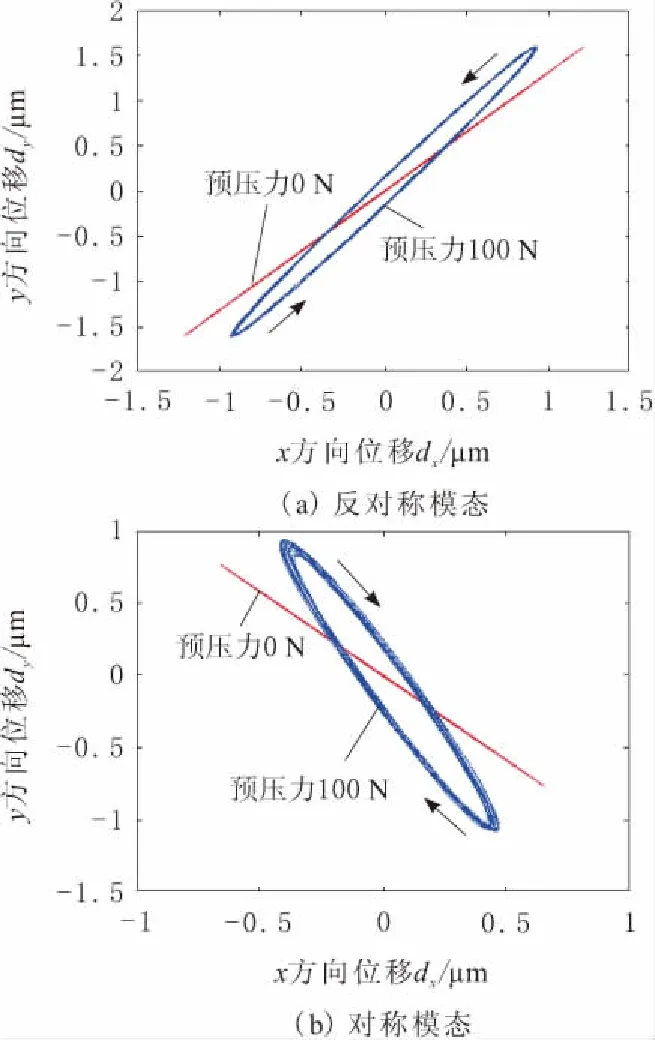
图8 驱动足运动轨迹
2.2 机械输出特性实验
测试电机机械输出性能的实验平台如图9所示。由信号发生器产生两相相位差为π或0的正弦信号,经过功率放大器放大后施加到定子的A,B相以驱动电机。电机驱动吊有砝码(作为负载)的直线导轨运动,导轨运动速度通过高速激光位移传感器测得。
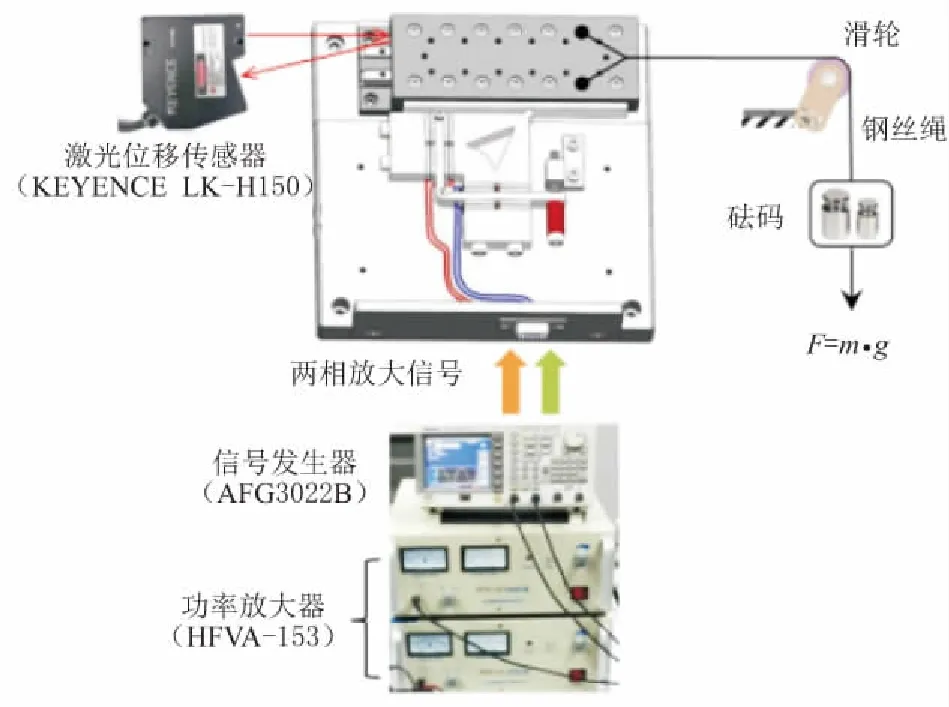
图9 电机输出特性实验平台
当预压力为100 N,激励电压峰峰值为500 V时,样机的空载速度频率特性曲线如图10所示。由图10可知,对称模态具有较大的工作频率带宽。在工作频率范围内,样机的空载速度随着频率的增大先增大后减小,反对称模态在频率25.5 kHz附近空载速度最大,最大速度为371 mm/s;对称模态在频率37 kHz附近具有最大空载速度,最大速度为690 mm/s。

图10 样机空载速度频率特性
样机在不同预压力下的机械输出特性曲线如图11所示。实验结果表明,电机的输出速度随着负载的增加而下降。在200 N预压力、峰峰值为500 V激励电压下,样机在反对称和对称模态下的最大输出力分别为90 N和100 N,电机定子重1.674 N,最大推重比为59.7。

图11 不同预压力下的机械输出特性
表1为本文设计的V形板结构直线超声电机与几种现有V形直线超声电机的输出性能的比较。文献[5]和文献[9]中的电机为双模态超声电机,文献[8]为单模态超声电机。由表1可以看出,本文研制的板结构电机具有较大的推力和推重比,可用于需要大推力且安装空间狭窄的直线作动场合。

表1 几种V形直线超声电机输出性能的比较
3 结束语
提出了一种单模态驱动的V形板结构直线超声电机,它利用基于板结构弯曲振动形成的对称和反对称模态实现电机的双向运动。电机采用2个板结构振子构造定子,利用振子的低阶弯曲振动,易于激发且具有更多的振动能量;驱动足通过横截面连续收缩的变截面梁连接,可放大驱动足的振幅和提高振速;采用一端铰支的夹持方式,有利于提高电机结构的稳定性和输出力。样机实验表明,电机在反对称模态下最大速度和输出力分别为371 mm/s和90 N;在对称模态下最大速度和输出力分别为690 mm/s和100 N。该电机结构简单、紧凑,运行稳定,推力大,可用于电机安置空间狭窄且需要大推力的直线驱动场合,有较大的应用前景。
