智能变电站巡检服务机器人
2018-09-28陈园园周虎成
陈园园,王 涛,周虎成
(周口师范学院 物理与电信工程学院,河南 周口 466001)
变电站在电力系统供电与传输之间起到重要的桥梁作用,其运行过程中是否安全可靠,直接影响着人们的生产和生活. 一旦变电站设备出现安全隐患或实际故障,此时的巡检工作就能够预防和先知,保障供电系统能够及时恢复正常的工作.随着国民经济的发展,国家对电力网系统的投入不断增大,就对供电系统的可靠性提出更高的要求,而且变电站除电力线路巡检外,更是输电网络的变换、控制中心,各种电气设备也是巡检的重点,对于越来越复杂的设备诊断,传统的巡检方式已满足不了现实需求,这就迫切需要研发方便灵活的巡检装置来解决上述问题[1].
随着机器人技术的飞速发展,面对上述问题,变电站智能巡检机器人的研究及应用给出了很好的解决办法.该机器人结构一般包含红外热像仪、可见光 CCD 、拾音器等检测与传感装置等,可以代替人工巡检而应用于室外变电站,可随身携带或附于机械装置上,自主或直接控制的方式进行巡检工作,工作时长可达24 h,能够及时发现供电系统的异常,准确提供故障隐患和诊断分析的有关数据,大大提高变电站安全运行可靠性,为电力设备实时有效的诊断维护提供保障. 此项研究对供电设备有着重大意义,并且有着非常广阔的应用前景.
日本学者在2003年首先提出了变电站巡检机器人的研究方案,并完成了一系列的模拟实验[2],其他各国相继投入大量技术人员和资金对变电站巡检机器人进行自主研发. 中国在 2001年首次提出,将变电站移动服务机器人技术运用到设备巡检上[3],于2005年10月,首次研制出产品样机并投放使用,后续又研制出了一系列的变电站巡检机器人产品[4-5].
但变电站巡检机器人系统结构复杂,需要多门学科技术融合在一起,该机器人一般应用在特殊设备和场合中,其涉及的多项技术及功能仍需不断研发优化. 因此以地方220 kV电力系统为背景,从机器人巡检和设备检测技术要求出发,把机电一体化、视觉、多传感器融合、网络传输等技术融于一体,本文介绍了一种基于220 kV变电站智能巡检服务机器人的系统组成、功能模块和关键技术.
1 变电站智能巡检服务机器人总体设计
1.1 巡检机器人系统组成
根据被巡检对象的特点、巡检内容及与技术要点相匹配的设计要求,巡检机器人系统的组成方案如图 1所示,总体可分为三层:基站层、网络通信层和智能移动终端层. 基站层以基站系统为主,主要完成的功能有:任务管理、服务查询、图像实时监控及处理、系统的驱动控制、数据信息处理和运行状态显示及异常报警等,主要负责对巡检机器人当前的运行状态进行监控、采集数据、控制、记录图像、数据分析等;网络通信层主要以无线通信为目的,通过无线网络通信设备,将变电站巡检机器人实时采集到的信息传递给主控制中心,经过处理后的数据信息及时反馈给机器人.主要功能包括:检测实时图像、数据、自身状态以及控制中心对变电站巡检机器人所发出的遥控指令等. 智能移动终端以移动站系统为主,它是巡检机器人的核心,主要功能模块包括:嵌入式主控模块、自动充电模块、导航定位模块、安全防护模块、运动控制模块、云台控制模块等.

图1 巡检机器人系统的组成方案
1.2 巡检机器人系统主要功能
变电站智能巡检服务机器人应包含如下功能:
(1)检测功能:通过红外热像仪或传感器,实时的完成设备的巡检任务,不仅能够及时发现损伤、发热等机械问题或其他异常,而且能准确提供各项有效数据.
(2)导航功能:按照设定好的规划路径,通过导航参数的改变,实时调整机器人的运动姿态,实现机器人的小半径转弯、行走、爬坡、停靠和起步,参照障碍物信息规划最佳行使路径,利用导航定位模块产生的误差不大于±9.8 mm,在1 m/s的运动速度下,最小制动距离不大于0.4 m. 遇到危险情况及时终止行进,危险移除后应能恢复行走.
(3)预警和报警功能:对设备的故障或隐患进行预测,并能智能分析和自动报警.
(4)控制功能:设备的巡检人员可在后台进行监控,手动控制机器人主体、云台系统、红外热像仪等,实现人机互助,同时具备数据库功能,能将巡检信息实时储存,具备查询功能.
(5)自动充电功能:机器人配备车载蓄电池,电池充一次电可以连续作业的时间大于5 h,续航时间内,机器人能够稳定、可靠工作,在需要充电时能自主返回自主充电,配置 40 Ah智能充电器,最快充电时间应不大于30 min.
2 变电站智能巡检服务机器人关键技术
2.1 红外热图像处理
变电站设备运行过程中,出现的各项参数变化包括:负荷、设备压力值等,除此之外,设备在大多数情况下是通过测试运行温度来确定该设备工作是否出现异常,智能巡检机器人根据变电站现场设备实际运行情况,通过红外热图像处理技术得到监测数据并进行分析,来确定设备缺陷温度特征点. 可利用红外热像仪获得被测物体表面温度分布的热像图,然后将热图像传递显示到终端设备进行处理和分析.
由于变电站环境复杂,在实际监测过程中存在各种噪声信号,直接影响到红外热图像灰度值的测量,进而影响温度值的计算精度. 所以,为了提高精度,进而提高检测结果的准确度,对采集来的热图像进行处理变得尤为重要,红外热图像的处理[6-8]主要有增强和去噪.
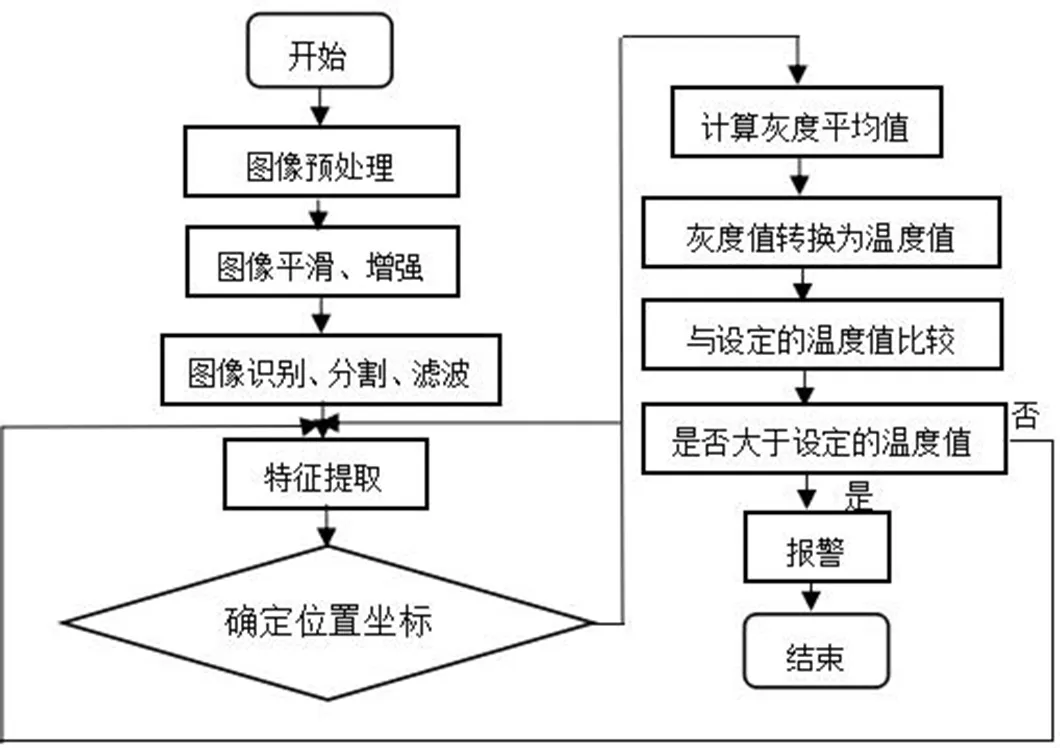
图2 红外热图像处理流程图
红外热图像处理流程如图2所示,移动摄像机或CCD获取现场监控视频信息后,对图像进行首次处理,先对图像的颜色信息进行校正,然后利用平滑、增强处理等算法对图像进行去噪处理,以便突出显示原图像而容易识别. 再利用分割和滤波等算法对首次处理后的图像进行提取,然后对分割出来的目标图像进行特征提取及分类,从系统中得到的准备坐标定位出发热缺陷的具体位置并实时报警,最后对事故的相关信息进行收集并存入后台数据库中.
得到的红外图像信息并不能直接利用,需要对红外图像和可见光图像进行配准和融合,本文采用互信息的方法进行配准,考虑到两者像素级的融合,采用混沌神经网络进行融合计算[9]. 图3所示可以看出图像处理后的效果.

图3 红外图像与可见光图像处理效果
2.2 路径规划
从20世纪70年代开始,国内外就开始研究移动机器人的路径规划问题,机器人路径规划从目标的角度出发分为全局路径规划和局部路径规划,全局路径规划是根据地图信息和任务信息,按照路径长度最短、转弯次数最少、综合策略最优等标准,规划出巡检机器人的运动路径;局部路径规划是在全局路径规划的基础上对收集到的周围环境数据进行综合分析,给出机器人的实时路径信息,即机器人的运动速度和转向角命令. 最终通过运动控制系统对接收到的路径规划结果,通过对车体运动进行运动学建模和分析,驱动和控制机器人的电机按指令完成行进任务.

图4 路径规划流程图
传统的全局路径规划方法主要有Dijkstra算法、A*算法、栅格法、拓扑法等,局部路径规划算法有人工势场法、遗传算法、神经网络算法、模拟退火算法,模糊逻辑法等. 目前研究者们往往将多种路径搜索算法结合起来,以解决路径规划存在的问题.
本文设计了一种改进的Dijkstra算法[10]与模拟退火方法的结果进行结合的方法,求出全局最优路径,最后通过运动控制系统根据得到的路径信息,驱动和控制巡检机器人行进. 其流程图如图4所示.
传统的Dijkstra算法在大规模、多路径节点的情况下会占用大量存储空间,且延长搜索时间,基于这些问题,本文采用双直角坐标系的象限划分方法限定捜索区域,如图5所示,以把电子地图划分为四个象限,给定起点A和终点B的位置坐标,以A为原点判断B所在的象限,缩小搜索范围,进行在该区域内搜索最短路径,此方法避开了大量无关节点的捜寻,缩小存储空间和搜寻时间,同时对生成的路径过滤不必要的点,可以得到任意两个停靠点之间的最短路径.

图5 以 A 为原点的搜索区域划分
通过多次实验结果得出,采用改进的 Dijkstra 算法比传统 Dijkstra 算法平均速度提高了87.08%,平均节点数少了近80%.
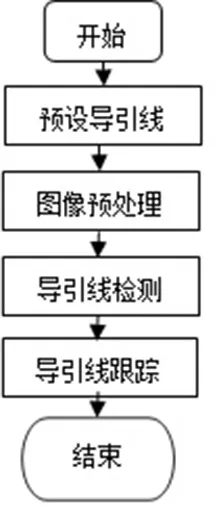
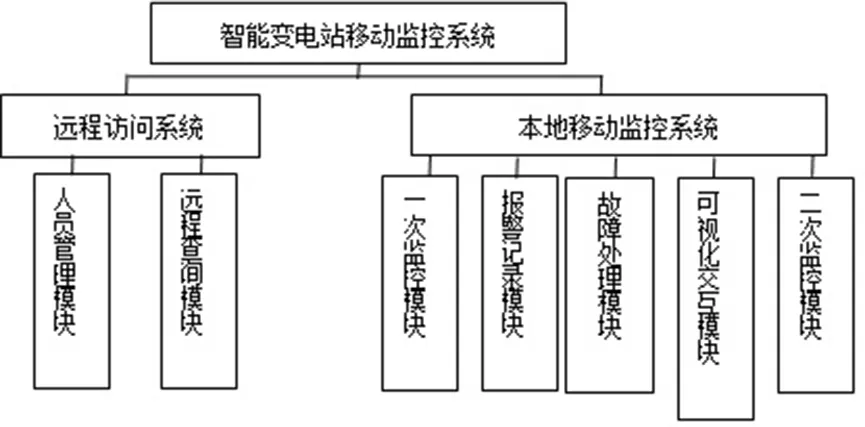
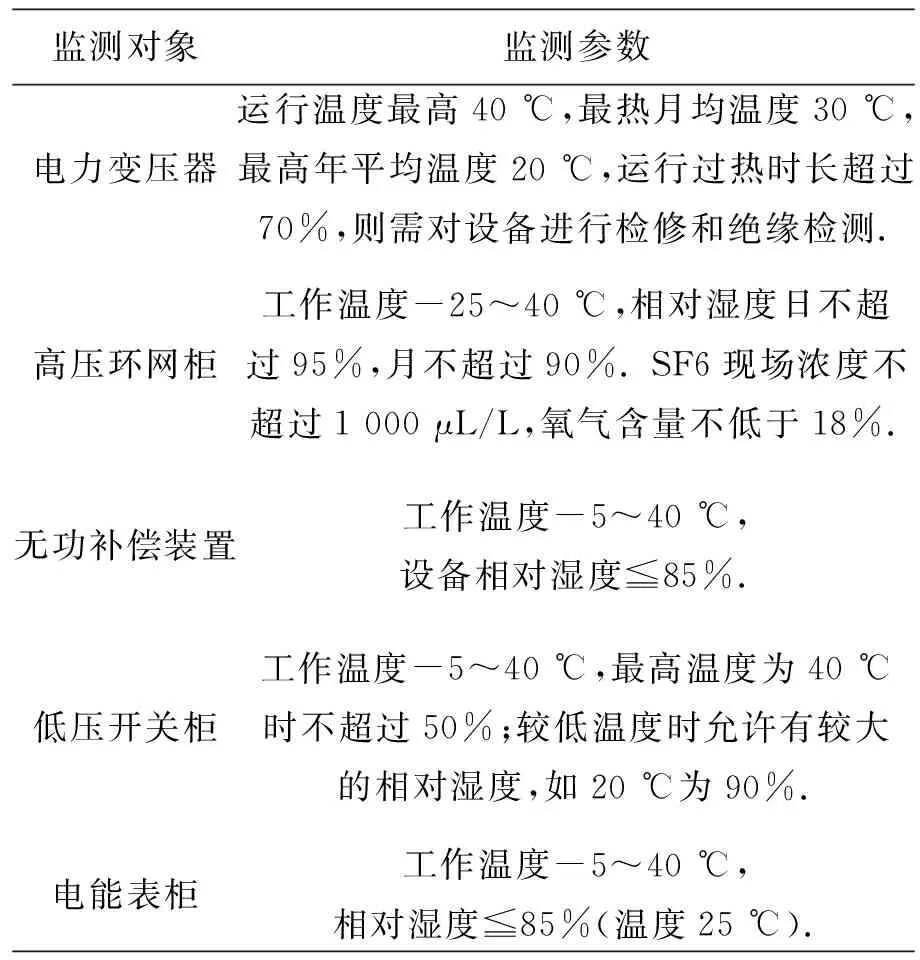
为了得到所有停靠点间的最优路径,用模拟退火算法解决组合优化问题. 首先随机地选取所有停靠点构成一个数据集合,用该组数据序列来表示一个解x,然后用该序列构成的路径的总长度来做能量函数E(x),该能量函数可以表示一个解的优化程度,能量函数的值越大,优化程度越低. 随机交换两个停靠点的顺序后构成的数据集合作为新的解x',新序列的总路径长度作为新的能量函数E(x'),如果E(x') 路径优化算法分为全局和局部两种,本文提出的方法属于全局最优的路径算法,有效提高了运行效率和机器人的智能化程度. 变电站巡检机器人的视觉导航是机器人在既定的路径范围内,机器人系统结构中的成像设备提取道路视频图像,控制机器人按规划好的路径行走,进而完成要求的巡检任务. 而导航系统的实时可靠性直接影响巡检机器人作业的效果. 因此,本文设计了一种基于模糊逻辑的变电站巡检机器人视觉导航方法,即使在光照强度很大的环境下,也能很好地完成巡检任务. 该导航系统的流图如图6所示,首先在路面预先铺设导引线,对于摄像机采集到的视频信息,用色彩分割的方法对图像进行预处理,采用形态学滤波作为去除干扰点的滤波方法,经过滤波后用三次B样条拟合算法实现导引线检测,最后用模糊逻辑控制算法实现导引线跟踪.随着视觉导航参数的不断变化,实时对机器人的运动姿态进行控制和调整,使其能够沿导引线按规定行走. 图6 基于模糊逻辑控制的视觉导航流图 通用的监控网络架构有传统的客户机和服务器结构,还有浏览器和服务器结构,本文将两种结构混合在一起构建一种新的体系,利用SSH 集成框架、Unity引擎、Android 系统等关键技术,开发一个面向智能变电站运行管理的可视化移动监控系统,该系统具有人员管理、数据查询、可视化交互等功能,实现了变电站的本地监控和远程移动访问.如图7所示.表1为变电站设备监控参数. 图7 智能变电站移动监控系统 监测对象监测参数电力变压器运行温度最高40 ℃,最热月均温度30 ℃,最高年平均温度20 ℃,运行过热时长超过70%,则需对设备进行检修和绝缘检测. 高压环网柜工作温度-25~40 ℃,相对湿度日不超过95%,月不超过90%. SF6现场浓度不超过1 000 μL/L,氧气含量不低于18%. 无功补偿装置工作温度-5~40 ℃,设备相对湿度≦85%. 低压开关柜工作温度-5~40 ℃,最高温度为40 ℃时不超过50%;较低温度时允许有较大的相对湿度,如20 ℃为90%. 电能表柜工作温度-5~40 ℃,相对湿度≦85%(温度25 ℃). 图8 可视化交互系统界面 以本地电力系统220 kV变电站为实验基地,配置两台巡检机器人,500 kV区一台,220 kV和35 kV区一台,每台巡检机器人各配置自主充电装置,进行分区巡视,道路总长约5 km,以RFID标签[12]标示的路口有约50个;机器人停靠点约300个;设备观测点约1 200个(平均每个停靠点观测附近有4台设备). 根据路径规划和视觉导航实现:500 kV区全任务巡检约70 min,220 kV和35 kV区全检时间约150 min. 每天定时3次巡检,遇到缺电情况将返回充电桩进行自主充电. 如图9所示为变电站巡检机器人实际工作展示. 图9 变电站巡检机器人实际工作现场 随着电力自动化系统的逐步发展,由于环境复杂及工作强度大等问题,传统的人工巡检方式难以满足现实需求.本文设计了一种智能变电站巡检机器人,首先利用互信息和神经网络技术对红外热图像进行识别和处理,设计了一种改进的Dijkstra算法与模拟退火方法的结果进行结合的方法,求出全局最优路径.在预设引导线的前提下,设计了一种基于模糊逻辑控制的视觉导航系统.根据视觉导航参数的变化,实时对机器人的运动姿态进行控制,驱动机器人按既定路径行走.最后设计了一个面向智能变电站运行管理的可视化移动监控系统. 这些关键技术的应用使得本文设计的巡检机器人能实时、稳定、有效地工作于无人值守的变电站环境,降低了劳工成本,具有很好的发展前景.2.3 导航系统
2.4 监控系统

3 变电站智能巡检机器人现场运行情况

4 结语
