基于图像处理技术的可视化干涉条纹处理计数系统
2018-09-26杨亚宾
杨亚宾

摘要:为了解决传统实验与测量应用中,由测量人员肉眼观察并记录干涉条纹变化信息过程中存在的易出错、效率低、劳动强度大等问题,采用计算机图像处理技术提供一种便捷高效的解决方案,通过图像采集与处理,设计干涉条纹处理计数系统。该系统选用CMOS摄像头实时采集干涉条纹图样,运用VC++6.0编写图像处理程序对干涉条纹图样优化处理,最终实现自动计数。经验证,干涉条纹计数系统计数准确、性能稳定、效率高,可减轻劳动强度、提高测量精度、满足应用需求。
关键词:干涉条纹;图像处理;VC++6.0;自动计数
DOI:10.11907/rjdk.172992
中图分类号:TP319
文献标识码:A文章编号:1672-7800(2018)007-0153-05
Abstract:Inthetraditionalexperimentsandmeasurementapplication,theproblemsoferror-proneness,lowefficiencyandhighlaborintensityexistintheprocessofobservingandrecordingtheinformationofinterferencefringechangesbythemeasurementpersonnel.Inordertosolvetheproblems,thispaperusesthecomputerimageprocessingtechnologytoprovideaconvenientandefficientsolution,bywhichwedesigninterferencefringeprocessingcountingsystemthroughtheimageacquisitionandprocessing.ThesystemusestheCMOScameratocollecttheinterferencefringepatterninrealtime,employsVC++6.0towritetheimageprocessingprogramtooptimizetheinterferencefringepatternandfinallyrealizetheautomaticcounting.Experimentsshowthatthedesignedinterferencefringecountingsystemisofstableperformance,accurateandhighlyefficient.Itcanreducethelaborintensity,improvethemeasurementaccuracyandmeettheapplicationrequirements.
KeyWords:interferencefringes;imageprocessing;VC++6.0;automaticcounting
0引言
光的干涉現象在测量和生活中有广泛应用,在光学部件精密测量、增透光薄膜制备、轴承滚珠分类和检测以及测定物质折射率方面有极其重要的作用。干涉条纹处理计数系统使用迈克尔逊干涉仪,其结构简单,精度高,可用来测定微小的长度变化、材料的折射率、光的波长等。然而,在运用干涉仪器时,关于干涉条纹信息的观察与记录由测量人员通过目测完成,存在诸多问题与不便,如因视觉暂留和视觉疲劳引起计数错误以及多次测量来降低测量误差所导致的效率低等问题。本文在现代电子技术和图像处理技术的基础上,开发了一套可视化的干涉条纹自动计数系统,可对传统的计数方式进行改进,对现有干涉计数仪器进行优化,极大地提高测量精度与效率。
1干涉条纹测量理论基础
1.1迈克尔逊干涉仪结构
迈克尔逊干涉仪如图1所示,S为单色激光光源,M1、M2为平面反射镜,平面镜M2固定,M1可通过精密旋钮前后移动。A为分光板,B为补偿板。补偿板B使经过分光板A分出的两束光都通过3次玻璃,减小两束光的光程差,提高两束光的空间相干性,消除色散的影响,使干涉图样更加清晰。O点为干涉条纹观察点。光源S发出的光线与平面镜M2垂直,与平面镜M1平行。分光板和补偿板与平面镜M1、M2成45°角。M2′为M2光路上的等效位置。两束光的干涉等效于M1与M2′之间空气薄膜产生的干涉。
1.2干涉条纹测量原理
在干涉图样中随机去一点,假设该点条纹级数为m。当该点由亮变暗再变亮时,该点的条纹级数由m级变为m+1级(或m-1级)。在已知光的波长λ的情况下,根据公式Δd=λ/2,可得移动距离。同理当有N条亮条纹经过该点时可得公式:Δd=Nλ/2。因此可以通过记录经过干涉图样上某点的条纹数计算平面反光镜的移动距离。
2数字图像采集系统设计
2.1采集系统结构与硬件选用
本文所设计的图像采集系统由光学成像和图像采集两部分组成。光学成像部分由迈克尔逊干涉仪光路部分完成,图像采集部分由CMOS网络摄像头和电脑完成。数字图像采集系统就是通过光敏传感器将图像的光信号转化为电信号,再用AD转换器将电信号转化为数字信号。然后经过数字芯片处理将数字信号编码形成一定格式的图像,通过数据接口传输到计算机进行处理和存储。
数字成像的核心是图像传感器。目前,图像采集系统常用CCD摄像机搭配图像采集卡,其成本较为昂贵。CMOS图像传感器具有价格低、功耗小,数据采集速度较快等特点,能满足系统的使用需求其主要指标包括:帧速30帧/s;分辨率640×480。
2.2干涉图样获取
2.2.1图样采集
将连续变化的图像在空间坐标上进行离散化处理。所选取的采样点称之为像素,由采样点的值所组成的矩阵可表示为:
2.2.3图样存储
本文采集和处理的是常见的BMP格式图片。BMP格式是一种无压缩位图格式。它在结构上由文件头、位图信息头、颜色表和图像数据4部分组成。
其中,位图数据记录着每一个像素的值,记录顺序为从左到右,从上到下。当biBitCount=1时,8个像素为1字节;当biBitCount=4时,2个像素为1字节;当biBitCount=8时,1个像素为1字节;当biBitCount=24时,1个像素为3字节。
3图像处理与测量
3.1干涉条纹处理算法
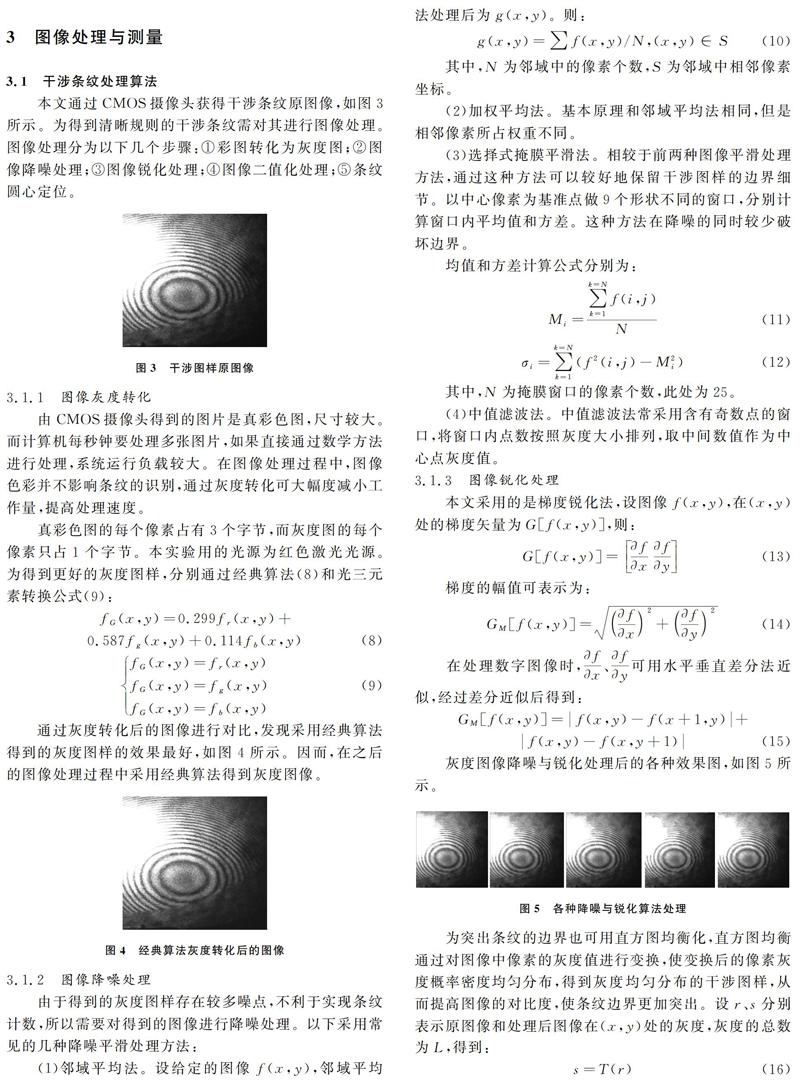
本文通过CMOS摄像头获得干涉条纹原图像,如图3所示。为得到清晰规则的干涉条纹需对其进行图像处理。图像处理分为以下几个步骤:①彩图转化为灰度图;②图像降噪处理;③图像锐化处理;④图像二值化处理;⑤条纹圆心定位。
3.1.1图像灰度转化
由CMOS摄像头得到的图片是真彩色图,尺寸较大。而计算机每秒钟要处理多张图片,如果直接通过数学方法进行处理,系统运行负载较大。在图像处理过程中,图像色彩并不影响条纹的识别,通过灰度转化可大幅度减小工作量,提高处理速度。
真彩色图的每个像素占有3个字节,而灰度图的每个像素只占1个字节。本实验用的光源为红色激光光源。为得到更好的灰度图样,分别通過经典算法(8)和光三元素转换公式(9):
通过灰度转化后的图像进行对比,发现采用经典算法得到的灰度图样的效果最好,如图4所示。因而,在之后的图像处理过程中采用经典算法得到灰度图像。
3.1.2图像降噪处理
由于得到的灰度图样存在较多噪点,不利于实现条纹计数,所以需要对得到的图像进行降噪处理。以下采用常见的几种降噪平滑处理方法:
(2)加权平均法。基本原理和邻域平均法相同,但是相邻像素所占权重不同。
(3)选择式掩膜平滑法。相较于前两种图像平滑处理方法,通过这种方法可以较好地保留干涉图样的边界细节。以中心像素为基准点做9个形状不同的窗口,分别计算窗口内平均值和方差。这种方法在降噪的同时较少破坏边界。
(4)中值滤波法。中值滤波法常采用含有奇数点的窗口,将窗口内点数按照灰度大小排列,取中间数值作为中心点灰度值。
3.1.3图像锐化处理
灰度图像降噪与锐化处理后的各种效果图,如图5所示。
为突出条纹的边界也可用直方图均衡化,直方图均衡通过对图像中像素的灰度值进行变换,使变换后的像素灰度概率密度均匀分布,得到灰度均匀分布的干涉图样,从而提高图像的对比度,使条纹边界更加突出。设r、s分别表示原图像和处理后图像在(x,y)处的灰度,灰度的总数为L,得到:
T(r)为变换函数,变换函数要满足两个条件。第一个是T(r),属于单调函数,从而保证变换后图像的灰度等级依然保持原顺序;第二个变换前后的定义域相同。
图像的灰度值可以看成随机变量。设图像有N个像素点,nk为第k级灰度的像素点数;rk表示第k个灰度等级,则灰度值在rk等级的像素出现概率为:
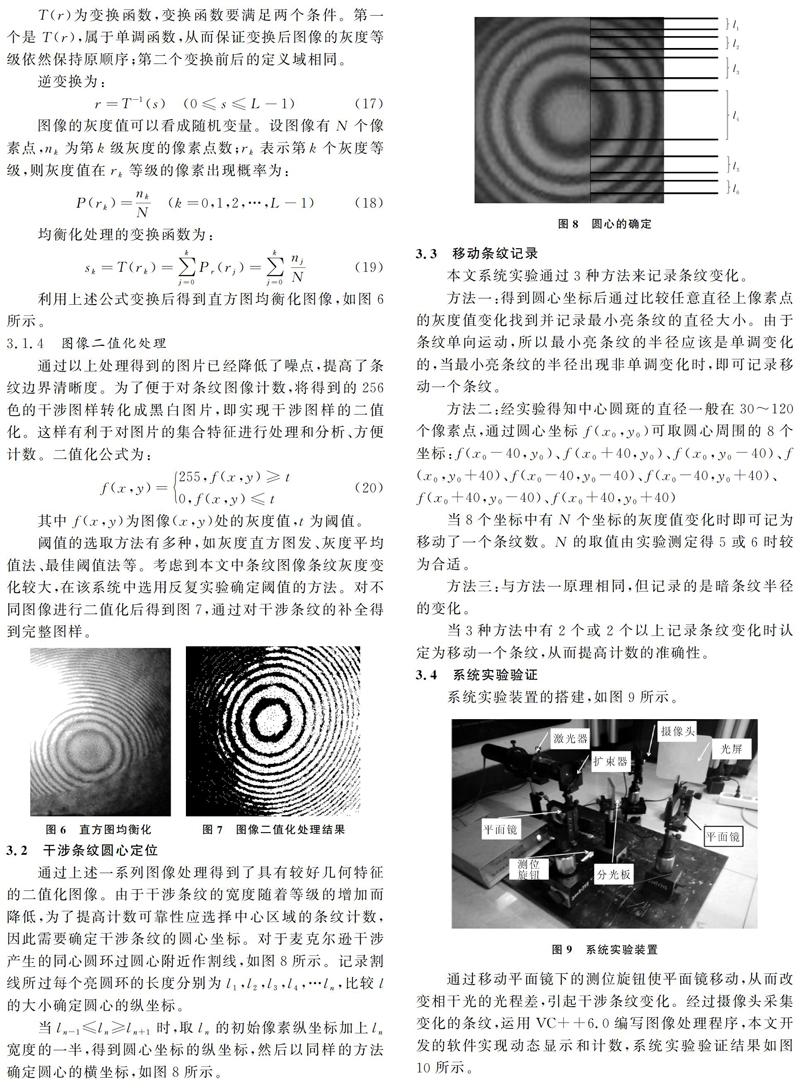
利用上述公式变换后得到直方图均衡化图像,如图6所示。
3.1.4图像二值化处理
通过以上处理得到的图片已经降低了噪点,提高了条纹边界清晰度。为了便于对条纹图像计数,将得到的256色的干涉图样转化成黑白图片,即实现干涉图样的二值化。这样有利于对图片的集合特征进行处理和分析、方便计数。二值化公式为:
阈值的选取方法有多种,如灰度直方图发、灰度平均值法、最佳阈值法等。考虑到本文中条纹图像条纹灰度变化较大,在该系统中选用反复实验确定阈值的方法。对不同图像进行二值化后得到图7,通过对干涉条纹的补全得到完整图样。
3.2干涉条纹圆心定位
通过上述一系列图像处理得到了具有较好几何特征的二值化图像。由于干涉条纹的宽度随着等级的增加而降低,为了提高计数可靠性应选择中心区域的条纹计数,因此需要确定干涉条纹的圆心坐标。对于麦克尔逊干涉产生的同心圆环过圆心附近作割线,如图8所示。记录割线所过每个亮圆环的长度分别为l1,l2,l3,l4,…ln,比较l的大小确定圆心的纵坐标。
当ln-1≤ln≥ln+1时,取ln的初始像素纵坐标加上ln宽度的一半,得到圆心坐标的纵坐标,然后以同样的方法确定圆心的横坐标,如图8所示。
3.3移动条纹记录
本文系统实验通过3种方法来记录条纹变化。
方法一:得到圆心坐标后通过比较任意直径上像素点的灰度值变化找到并记录最小亮条纹的直径大小。由于条纹单向运动,所以最小亮条纹的半径应该是单调变化的,当最小亮条纹的半径出现非单调变化时,即可记录移动一个条纹。
方法二:经实验得知中心圆斑的直径一般在30~120个像素点,通过圆心坐标f(x0,y0)可取圆心周围的8个坐标:f(x0-40,y0)、f(x0+40,y0)、f(x0,y0-40)、f(x0,y0+40)、f(x0-40,y0-40)、f(x0-40,y0+40)、f(x0+40,y0-40)、f(x0+40,y0+40)
当8个坐标中有N个坐标的灰度值变化时即可记为移动了一个条纹数。N的取值由实验测定得5或6时较为合适。
方法三:与方法一原理相同,但记录的是暗条纹半径的变化。
当3种方法中有2个或2个以上记录条纹变化时认定为移动一个条纹,从而提高计数的准确性。
3.4系统实验验证
系统实验装置的搭建,如图9所示。
通过移动平面镜下的测位旋钮使平面镜移动,从而改变相干光的光程差,引起干涉条纹变化。经过摄像头采集变化的条纹,运用VC++6.0编写图像处理程序,本文开发的软件实现动态显示和计数,系统实验验证结果如图10所示。
4结语
本文采用CMOS摄像头,运用图像传感技术、图像处理计数、计算机编程,在迈克尔逊干涉仪基础上实现了计算机自动记录干涉条纹移动数目,开发了基于图像处理技术的可视化自动计数系统,为干涉条纹自动计数提供了新的方法。以COMS摄像头和计算机硬件为基础,通过实时采集和处理干涉图样得到条纹变化,提高了测量效率,降低了测量误差并且减轻测量人员的劳动强度,可用于现有干涉计数仪器的升级改造。
参考文献:
[1]何勇,王青,朱日宏等.Windows环境下干涉图像采集和处理[J].红外与激光工程,2003,32(2).203-206.
[2]WERMESN.DepletedCMOSpixelsforLHCproton-protonexperiments[J].NuclearInstrumentsandMethodsinPhysicsResearch,2016(824):483-486.
[3]MAHAKUDR,PRAKASHO,DIXITSK,etal.AnalysisonthelaserbeampointinginstabilityinducedfringeshiftandcontrastdilutionfromdifferentinterferometersusedforwritingfiberBragggrating[J].OpticsCommunications,2009(282):2204-2211.
[4]SEJZEIAH,JAMZADM.EvaluationofvariousdigitalimageprocessingtechniquesfordetectingcriticalcrescentmoonandintroducingCMD-Atoolforcriticalcrescentmoondetection[J].Optik-InternationalJournalforLightandElectronOptics,2016,127(3):1511-1525.
[5]尤政,李濤.CMOS图像传感器在空间技术中的应用[J].光学技术,2002,28(1):3-35.
[6]雷玉堂.光电检测技术[M].北京:中国计量出版社,1997
[7]T.帕夫利迪斯.计算机图形显示和图像处理的算法[M].北京:科学出版社,1987.
[8]JOHAND,BENOITP.Rigidimageregistrationbygeneraladaptiveneighborhoodmatching[J].PatternRecognition,2016(55):45-57.
[9]鄢静舟.干涉图特征信息自动采集方法[J].光学技术,2000,26(1):71-75.
[10]PEREZ-RODRIGUEZJ,ARRO-PENAAG,GARCIA-PEDRAJASN.Simultaneousinstanceandfeatureselectionandweightingusingevolutionarycomputation:proposalandstudy[J].AppliedSoftComputing,2015(37):416-443.
[11]SUNUPRAPTOH,DANOEDOROP,SUR.Evaluationofpan-sharpeningmethod:appliedtoartisanalgoldminingmonitoringinGunungPaniforestarea[J].ProcediaEnvironmentalSciences,2016(33):230-238.
[12]WANGW,CHENC,MICHAELKNG.Animagepixelbasedvariationalmodelforhistogramequalization[J].JournalofVisualCommunicationandImageRepresentation,2016(34):118-134.
(责任编辑:江艳)
