基于ATmega 328P的简易风洞控制系统的设计
2018-09-26彭耀仟
彭耀仟
(中南大学自动化学院,湖南长沙410000)
1 系统方案
系统由ATmega328p单片机、TB6612电机驱动电路、风洞、电源模块、触摸屏显示模块和电源模块构成,如图1所示。
微控制器发出小球的位置或运动轨迹指令信息直流风机的风叶开始旋转,产生的风力推动小球运动。运用特定的激光位置传感器精确检测兵兵球位置,并发送给微控制器,系统根据小球设定位置与实际位置的偏差,运用PID算法,调整PWM波占空比,控制电机转速的大小,从而实时改变风机风力的大小,实现小球位置或运动轨迹的实时控制。

图1 系统框图
2 风洞控制实现方法
2.1 风机调速方式
采用脉宽调制技术(PWM),直接将恒定的直流电压调制成可变大小和极性的直流电压作为电动机的电枢端电压,由单片机ATMEGA328p定时器模块产生不同的占空比,进而调节离心风机的转速。PWM调速便于控制,相应速度较快,抗干扰性强。
2.2 状态调整算法的选择
分段PID比例积分微分控制。普通PID控制算法中引入积分环节的目的,是为了消除静差,提高控制精度。但在过程的启动、结束或大幅度增减设定时,短时间内系统输出有很大的偏差,会造成PID运算的积分积累,引起系统较大的超调和振荡。温度过程对象变化比较缓慢且带有纯滞后环节。若采用单纯PID控制,当有较大扰动或大幅度改变给定值时,会产生较大的偏差,此时在积分项的作用下,往往会产生较大的超调和长时间的温度波动,因而采用分段PID调节。
3 硬件电路的设计
3.1 风洞装置的设计
采用内径为40mmm亚克力有机玻璃圆管,硬度较硬,抗冲强度较弱,透明度较高,连接部同样采用有机玻璃材料,采用螺纹套扣的方式和风机进行完美的连接,又可以当做最终作品支架的一部分,并且有机玻璃圆管的价格比UPVC圆管的价格低。
3.2 位置检测电路
检测传感器选用GY-530 VL53L0X激光测距传感。GY-530 VL53L0X激光测距传感不同于传统的红外接近检测传感器,VL53L0X输出的是精确到毫米的测距结果,目标物体的颜色和反射光不会影响测距结果。传感器内部完成测距计算,通过I2C总线接口输出数据,因而对系统主控制器的需求降至最低。
3.3 电机驱动电路
TB6612FNG是东芝半导体公司生产的一款直流电机驱动器件,它具有大电流MOSFET-H桥结构,双通道电路输出,可同时驱动2个电机。输入信号端AIN1接高电平,IN2接低电平,电机M1正转;通过PWM调制将恒定的直流电压调制成可变大小和极性的直流电压作为电机的电枢端电压,实现系统的平滑调速,从而灵敏地调节风机的转速。
3.4 触摸屏显示电路
触摸屏显示电路采用选用USART HMI串口触摸屏,选用八位并行的接口方式,可实时动态显示系统控制模式、小球位置和维持状态的悬浮时间。
4 软件设计
4.1 程序流程图设计
程序设计的总体思路如图2所示。
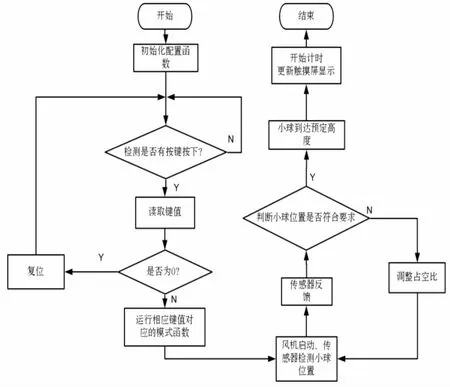
图2 程序流程图
4.2 调速算法设计
(1)本设计采用PID调速设计
PID调速有比例、积分、微分控制,简称PID控制,又称PID调节。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
(2)PID定高
本系统是控制电机转轴上的扇叶风速来控制乒乓球的高度,当电机转速大时,风扇产生的气流增大,乒乓球向上运动,反之,当电机转速小时,风扇产生的气流增小,乒乓球向下运动,当乒乓球的重力等于气流的力时,乒乓球悬停,因此,可以运用PID来控制小球的高度,设置的高度由数组确定,运用超声波测出小球的真实高度,进而经过PID不停的运算后,输出PWM波控制电机的转速控制气流的速度,使系统稳定,乒乓球悬停。算法流程图如图3所示。

图3 PID算法流程图
5 系统测试方法与结果
5.1 测试条件
(1)仪器
UT2062c双通道示波器 一台
UT71A 四位半数字万用表 一台
(2)环境条件
测试环境无风、无强光、温度在26℃左右。
5.2 测试方法
通过控制触摸屏的滑片控制小球实现所要求的功能。
5.3 测试结果
(1)小球置于圆管底部,启动后控制小球向上到达BC段,并维持10秒以上,测试5次,如表3所示。
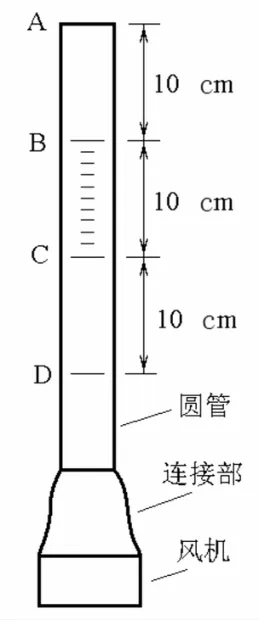
图4 风洞组成

表3 设计要求(1)的测试数据
(2)当小球维持在BC段时,用长形板(宽度为11mm,即为风机直径的三分之一)遮挡风机的进风口,小球继续维持在BC段,测试5次,如表4所示。
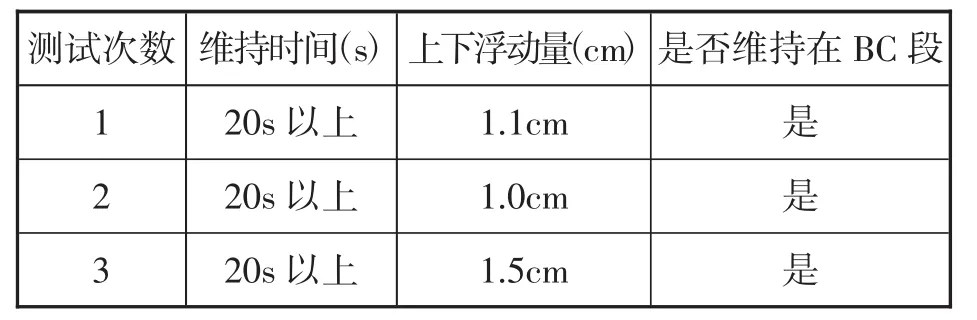
表4 设计要求(2)的测试数据
(3)以C点的坐标为0cm、B点的坐标为10cm;用键盘设定小球的高度位置(单位:cm),启动后使小球稳定地处于指定的高度10秒以上,上下波动不超过±1cm,测试5次,如表5所示。

表5 设计要求(3)的测试数据
(4)以适当的方式实时显示小球的高度位置及小球维持状态的计时,测试5次,如表6所示。

表6 设计要求(4)的测试数据
(5)小球置于圆管底部,启动后5秒内控制小球向上到达圆管顶部处A端,且不跳离,维持10秒以上,测试5次,如表7所示。

表7 设计要求(5)的测试数据
从表3~表7可知,本风洞控制系统完设计要求,并在此基础上进行自主发挥设计,可任意显示小球的位置高度。
