厘米级空间碎片建模研究
2018-09-25王晓伟刘静
王晓伟, 刘静
(1.中国科学院国家天文台,北京100012;2.中国科学院大学,北京100049;3.国家航天局空间碎片监测与应用中心,北京100012)
1 引言
空间碎片根据尺寸大小可分为三类:一类是尺寸在10cm以上的,称为大碎片,易被地面观测、跟踪,从而通过预警避免碰撞;一类是尺寸在1cm以下的,称为微小碎片,可通过航天器表面加固防护材料进行防护;还有一类是尺寸介于前两者之间的,称为危险碎片,亦即本文讨论的厘米级碎片,航天器一旦遭遇这类碎片,难免会造成部分甚至全部功能损毁失效。
据估计[1],尺寸在1~10cm之间的在轨碎片数量已达到74万个,总质量超过50t。厘米级碎片最主要的来源就是爆炸或碰撞导致的在轨解体事件,一次在轨解体事件就可以产生数十万个厘米级的解体碎片。除解体碎片之外,厘米级碎片的来源还包括固体火箭发动机点火产生的Al2O3熔渣、NaK冷却剂液滴等非解体碎片。厘米级碎片可以使航天器在任务寿命期间累积遭受约5%的功能损失或者任务损失[9]。
鉴于空间碎片对航天器造成的严重威胁,世界上多个国家都研究并建立了空间碎片环境模型,以预测空间碎片的密度分布以及未来的演化趋势。空间碎片环境模型通常又分为演化模型和工程模型。演化模型主要基于过去编目碎片的演化历史,考虑空间碎片受到的各级摄动,以及在演化过程中碎片增加或减少的主要机制,从空间碎片密度分布、数量增长、碰撞解体发生的概率等方面对未来一两百年空间环境的稳定性进行预测。空间环境演化模型可以对碎片清除与减缓的效能进行评估,对主动碎片清除策略的制定和实施提供模型支撑和建议。工程模型主要基于当前空间环境的观测数据,考虑编目碎片以及未编目的小尺寸碎片的来源、密度、通量等,对当前以及未来短期内的空间碎片环境进行描述,从而可以对航天器所处的空间碎片环境进行评估,为航天器轨道设计和防护结构设计提供参考。
厘米级空间碎片具有难防护、难规避且数量众多的特点,使得航天器在执行任务期间遭到撞击以致损毁的概率很大。因此,关于厘米级碎片的模型研究主要是建立短期的工程模型,关注较小尺寸的空间碎片对执行任务的航天器撞击的概率,为航天器的轨道设计和防护设计提供参考及建议。由于厘米级碎片与卫星相撞也可能导致某些解体事件发生,从而对空间环境带来一定的长期影响,故一些较为长期的演化模型中对厘米级的碎片也有考虑。
2 空间碎片环境建模
无论是演化模型还是工程模型,其建模的根基都是碎片的监测数据。对于大尺寸碎片,美国空间监测网目前的监测能力已经能够完全覆盖,但其监测数据并不完全对外公开发布。对于厘米级及以下的小尺寸碎片,目前的监测能力非常有限,只能根据已有的监测数据进行不完全的粗略的分布统计。
2.1 空间碎片监测
目前对空间碎片的监测手段根据监测方式可分为地基监测和天基监测。
地基监测是空间碎片监测的传统手段,常用的监测设备主要是雷达和望远镜两类。地基雷达可以进行全天候的观测,不受日光限制,但由于雷达探测的距离与功率的4次方成反比,因此雷达通常只能监测较低轨道的空间物体。对于较高轨道的空间物体,可以用地基光学望远镜来观测,但是地基望远镜的观测容易受到日光和大气等条件的影响,只能在天空晴朗的夜晚进行观测。
相比于地基监测,天基监测有着更好的观测条件,其中最主要的一项就是全天候连续24h观测,而且大大减少了观测距离;另一项优势是没有了大气层的扰动可以达到更高的监测精度,获得更高的探测率。但天基监测的发展受到诸多限制,如设备耗费成本高且不便维护更新、能源消耗大、搭载平台尺寸和质量有限等。
2.1.1 地基监测
美国上世纪90年代先后建成Haystack[10,11]、HAx和Goldstone雷达[12]作为美国空间监测网(SSN)的辅助设备对厘米级碎片进行监测,其中Haystack与HAx雷达每年工作500~700h,观测范围300~1900km,是1~30cm的空间碎片数据的主要来源,而Goldstone雷达作为前两者对空间碎片监测的补充,每年工作100h,观测范围350~3300km,可提供0.2~1cm的空间碎片环境数据。目前,美国正在建设新一代的地基雷达系统Space Fence[13],该系统计划使用两部S波段雷达对近地轨道 (LEO)的小至5cm的目标,尤其是未知目标,进行全天候的发现和探测,部分2cm大小的目标也能被观测到。
在欧洲,欧空局主要与德国的TIRA雷达系统合作。TIRA雷达可以对空间碎片进行探测和跟踪,此外还进行常规的 “Beam park”实验,即雷达波束指向一个固定方向保持24h不变,这样可以在地球一个自转周期内在一个窄带内360°环扫天球,监测所有通过该波束的空间目标。在这种实验中,TIRA雷达能够对1000km处2cm的目标进行监测和定初轨。如果与附近 Effelsberg的100m孔径接收天线进行联合观测,其观测精度能提高至1cm。此外,欧空局的EISCAT雷达系统最初任务是进行电离层的观测,然而随着空间碎片专用计算机在处理单元后端上的运行,这些雷达能够对LEO轨道2cm的空间碎片进行统计观测。[14,15]

表1 国外一些空间碎片监测地基雷达设备Tab.1 Some foreign space debris monitoring ground-based radar equipment
光学望远镜的分辨能力与所观测目标的距离平方成反比,因此地基光学探测可以对较高轨道的空间碎片进行观测,从而弥补雷达探测受距离限制的不足。美国空间监测网对高轨目标监测的主要设备是地基光电深空监测系统GEODSS及毛伊岛光学跟踪和识别系统MOTIF,监测的地球同步轨道 (GEO)目标尺寸大多在1m以上。在空间监测网的光学设备之外,美国目前在用的光学监测设备有密歇根轨道碎片望远镜MODEST[18]和米级自主望远镜 MCAT[19,20]。MODEST是一个0.6/0.9m的施密特望远镜,主要用于观测GEO轨道目标,标准曝光时间为5s,探测的极限星等为18等,相当于25cm大小的空间碎片。MCAT望远镜是由美国国家航空航天局 (NASA)和空军研究实验室合作的项目,孔径为1.3m,主要用于对GEO和LEO进行统计观测,能探测到GEO轨道上约13cm大小的目标,以及LEO轨道上1cm大小的目标。此外,美国还在进行由NASA和AMOS合作的NASS项目,来采集LEO和GEO轨道目标的物理特性,为空间环境模型以及航天器的防护提供数据[21]。
欧洲用于监测空间碎片的光学设备有欧空局空间碎片望远镜SDT,法国TAROT望远镜,英国PIMS光学观测系统,Starbrook望远镜,以及ZIMLAT/ZimSMART望远镜等[15]。欧空局的SDT望远镜位于西班牙Teide天文台,孔径1.3m,用来观测GEO轨道目标,探测极限在19~21等之间,相当于GEO轨道上15cm大小的空间碎片。法国TAROT望远镜最初是用来发现伽玛暴现象的,后被用于高轨和GEO轨道目标的跟踪观测,其孔径大小为0.25m,探测极限为17等。英国的PIMS光学观测系统包含3个望远镜,被用于观测GEO和MEO轨道范围,孔径大小为0.4m,能探测到GEO轨道50cm大小的空间目标[5]。
2.1.2 天基监测
目前,美国、加拿大等航天大国都在建设监测空间碎片的天基设备。1996年美国发射了一颗中段空间试验卫星MSx,其搭载的可见光设备SBV[22,23]对LEO到GEO轨道的空间目标均可以获得高分辨率的测量结果,探测极限比地基监测系统低许多,对空间碎片探测和特性描述具有很高价值,后成为美国空间监视网的一部分。美国正在建设的天基空间监视SBSS系统[24-26],是一个搭载光电传感器的卫星星座,将极大地提升对空间目标的监视、跟踪和识别能力。SBSS系统的第一颗卫星 “探路者”作为MSx/SBV探测器的继任者已于2010年发射,其探测能力比MSx/SBV系统有很大的提升。SBSS系统后续要部署一个尺寸更小的3星星座,来接替 “探路者”卫星,以增大覆盖面积,缩短目标重访周期,预计SBSS系统第一颗后续星将于2021年发射。此外,美国的天基监测项目还有国际空间站上搭载的专门监视厘米级空间碎片的Ku波段雷达,轨道深空成像仪ODSI系统,以及其他多项空间目标监视卫星技术试验项目。预计到2020年左右,美国在全球的覆盖盲区将显著缩小,并在地基系统升级改造和部署新系统的基础上大力发展天基系统,大幅提升对深空微小目标的探测、跟踪与识别能力,届时美国空间监视网对LEO轨道目标的探测极限将提升到1cm,对GEO轨道目标的探测极限将提升到10cm。
此外,还有加拿大的空间监视系统CSSS。该系统利用天基卫星Sapphire搭载光学探测设备对深空目标进行跟踪探测,为美国空间监视网提供相关目标的轨道测量数据[27]。
2.2 空间碎片模型
ORDEM模型是由美国国家航空航天局(NASA)约翰逊航天中心研制的一种半经验性工程模型,用以支持美国航天飞机和国际空间站的设计和操作。该模型历经多次更新升级,目前最新版本是ORDEM3.0。其研制的另一模型LEGEND是一种能够对LEO到GEO轨道环境的碎片分布进行长期预报的三维模型,是NASA最新的长期演化模型 (替代了之前的一维EVOLVE模型)。

表2 当前国际上一些空间碎片环境模型Tab.2 Some present international space debris environment models
MASTER是欧空局 (ESA)根据空间密度和瞬变速度三维离散化研制的一种半确定性环境模型,可以提供短期环境预测如碎片密度分布等情况。DELTA模型是英国国防科技公司为欧空局研制的碎片环境长期演化模型,是一种三维半确定性模型,能对1mm以上的所有来源的空间碎片进行预报,目前最新版本是DELTA3.1。
DAMAGE是英国南安普顿大学研制的三维半确定性模型,最初是为模拟GEO轨道碎片环境研发的,后经过更新升级能对LEO到GEO的轨道环境进行长期演化。
MEDEE是法国国家太空研究中心研制的用于研究未来空间环境稳定性的长期演化模型。
LUCA是德国布伦瑞克大学研制的碰撞分析长期效用模型,目前正在进行全面升级。
SDM模型是意大利最初在与欧空局的合同下研制的,用来描述地球周围空间环境与未来演化情况,最近经过全面升级,最新版本为SDM4.1。该模型可以对LEO到GEO轨道环境进行三维仿真,对尺寸大于1mm的所有碎片主要增加和减少机制都进行了模拟。
SDPA-E[31,32]是俄罗斯航天局在SDPA的基础上开发的一个工程模型。SDPA-E模型旨在对当前和未来的空间碎片环境模型的基本特征做出快速、便捷、可视化的评估。该模型可评估的空间碎片是LEO和GEO两个空间区域内的特征尺寸大于1mm的空间目标,并能计算自定义目标轨道的碰撞通量和通量的角分布,以及平均碰撞速度和碰撞方位角度的依赖关系等特征。该模型曾在2003年和ORDEM2000模型与MASTER2001模型一起用于机构间空间碎片协调委员会 (IADC)空间碎片工程模型探讨,但之后一直未进行更新。
SDEEM2015[33]是我国自主研制的工程模型,可对1959~2050年LEO轨道上10μm~10m的空间碎片环境进行评估。SDEEM2015模型利用地基或天基的探测数据,以及相关航天活动任务所采集的历史数据等,对碎片的源头进行区分和建模。这些源头包括解体碎片、NaK液滴、固体火箭熔渣和粉尘、溅射物、航天器表面剥落物以及微流星体等。后续研究中,SDEEM2015模型的适用范围将由LEO轨道扩展到GEO轨道,研究加强中高轨道及GEO空间碎片环境的描述。
SOLEM是我国自主研制的空间碎片演化模型,该模型考虑空间碎片主要的增加和减少机制,模拟未来航天器的发射、任务后轨道弃置和主动碎片清除措施,以及在轨道演化过程中可能出现的危险交会和碰撞解体事件,给出未来200年内任意时刻空间碎片的数量增长及密度分布等信息,从而判断分析未来空间环境的稳定性。
上述这些模型中,LEGEND、DELTA、DAMAGE、MEDEE、SDM、LUCA和SOLEM都是长期演化模型,主要关注目标是尺寸大于10cm的大碎片。其他短期的工程模型则主要关注厘米级及以下的小碎片,其中处于领先地位的是欧空局的MASTER模型和美国NASA的ORDEM模型,这两种模型的最新版本是MASTER2009和ORDEM3.0。下面着重介绍这两种模型。
2.3 工程模型
2.3.1 MASTER
MASTER模型是布伦瑞克大学根据与欧空局的合同研制开发的一种半确定性环境模型。该模型可以仿真模拟地球周围包括流星体在内的空间碎片环境,计算空间密度和速度三维分布,评估自定义目标轨道的碰撞通量及碰撞风险,考虑的目标尺寸最小为1μm,适用于从LEO到GEO的轨道高度。MASTER作为欧空局的参考模型得到了国际上的广泛认可。
MASTER模型历经多次更新升级,最新的版本是MASTER2009模型。MASTER2009通过TLE及欧空局的碎片特征信息系统和数据库等渠道获取碎片信息,对尺寸在1μm以上的全部碎片来源[28]进行了建模仿真,并通过与真实测量的数据对比进行模型检查,因此相比于其他模型,MASTER2009具有较高的可信度。
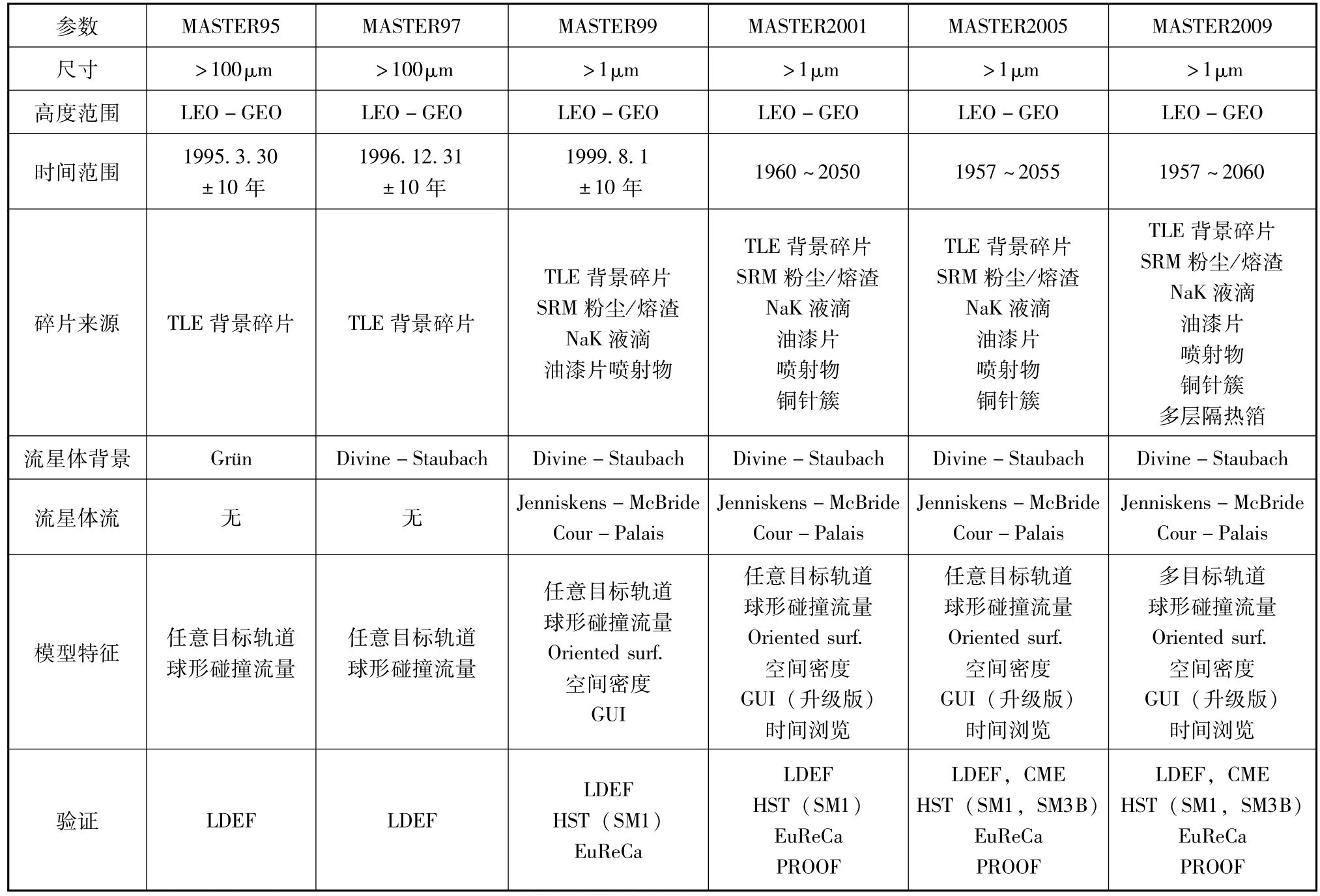
表3 MASTER模型各历史版本的对比Tab.3 Comparison of historical versions of MASTER models
2.3.2 ORDEM
1996年NASA建立了ORDEM96模型,该模型是基于计算机的半经验性工程模型,将对空间环境的直接探测与复杂的轨道碎片模型理论和输出结合在一起。该模型最初的目的是为轨道碎片研究人员和空间系统设计人员提供简单易用的工具来评估轨道碎片环境的特征,但很快就成为美国航天飞机、国际空间站等一系列重要空间任务的风险评估的基础和标准。ORDEM96利用 “干草堆”雷达数据第一次准确地描述了1~10cm之间碎片的环境特征。ORDEM2000更新了LEO环境的数据,包括由卫星发射带来的大物体的增长,航天飞机碰撞产生的小颗粒的增长估计,以及 Haystack、Haystack Auxiliary、Goldstone雷达数据显示的10μm及以上空间碎片的增长,能够更为准确地描述2000km以下的三维近地空间环境。
ORDEM2010[29]是ORDEM2000的升级版,能够更真实地描述空间碎片环境。ORDEM2010在融合真实探测数据与源模型仿真数据的基础上建立模型,可按轨道高度、纬度、碎片尺寸等对空间环境模型进行评估。该版本在前一版本的基础上更新了近10年的真实观测数据、使用了新的统计分析方法,对碎片的类型和密度进行分类,将使用范围从LEO区域扩大到GEO区域。ORDEM2010代表了NASA的经验性碎片评估模型的巨大进步,后命名为ORDEM3.0。但ORDEM3.0软件不再对外公开。
2.3.3 MASTER与ORDEM的对比
ORDEM与MASTER都是基于理论和经验建模,但建模方法不同,MASTER系列模型是对空间碎片的来源进行建模,而ORDEM系列模型则是根据空间碎片的材料密度进行建模。另外,建模所依据的观测数据来源不同,由此造成在MASTER模型中作为一个重要来源的SRM熔渣,在ORDEM模型中并未予以考虑。
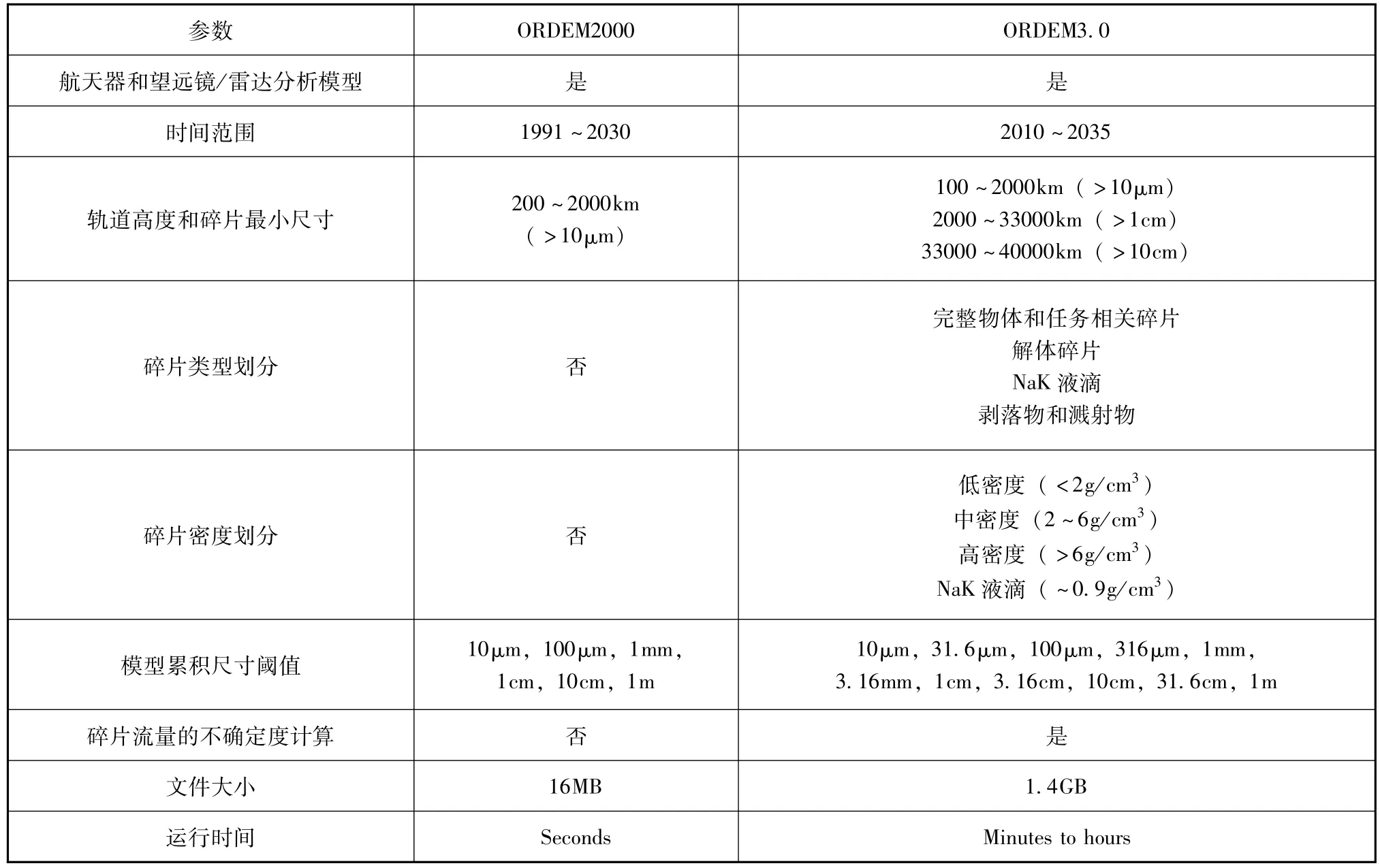
表4 ORDEM系列模型的对比[30]Tab.4 Comparison of ORDEM series models

表5 ORDEM 3.0与MASTER2009的对比Tab.5 Comparison of ORDEM 3.0 and MASTER2009
为比较两种模型对空间碎片环境描述和预测的异同,P.H.Krisko等人选择了国际空间站轨道、太阳同步轨道、地球同步转移轨道和地球同步轨道这4种特殊轨道,对比其在1m、10cm、1cm到1mm之间输出的空间碎片碰撞流量。结果显示,尺寸在1m的累积碎片碰撞流量两种模型吻合的非常好,在10cm碰撞流量MASTER2009要比ORDEM3.0稍微高一点,而在1cm到1mm之间的碰撞流量两种模型的结果差异较大[34]。
3 模型存在的问题
空间碎片环境建模是当前的研究热点之一,尤其是空间碎片工程模型对在轨航天器的碰撞风险评估在航天器的安全与防护中至关重要。MASTER2009和ORDEM3.0代表了当前空间碎片工程模型的最高水平,但其结果仍然不能十分真实地反应空间碎片环境,更不能精准地预测未来一段时间内航天器的碰撞风险。其原因有:一是用来建模的厘米级及以下的小尺寸碎片的观测数据不够全面,通过有限的原位探测数据统计,以及来自分辨率有限且不能持续观测的地基雷达和望远镜的数据,无法全面真实地描述并预测小尺寸碎片环境,而且地面解体、SRM燃烧实验并不能真实地反映在太空中的情况;二是航天器的爆炸、碰撞产生解体都属偶然事件,无法准确提前预测,而且解体程度与航天器的结构、材料、所载燃料多少、碰撞角度、运行速度等多个因素有关,远不是一个标准解体模型能准确预测的。此外,数据统计方法及建模方法也都会影响模型仿真的准确度。
4 总结与展望
厘米级空间碎片足以对在轨航天器构成严重的撞击威胁,难以依靠航天器自身的防护措施抵挡撞击;同时由于较小且数目可达几十万量级,现有的监测和编目能力仍然不足以实现对大部分厘米级空间碎片的监测与编目,因此亦无法通过预警和轨道机动来规避其对在轨航天器的撞击风险。此外,大量存在的空间碎片若相互碰撞亦会导致整体空间环境恶化,使得空间环境难以长期可持续利用。因此,加强对厘米级空间碎片的监测、编目和预警能力,提高对其长期演化情况的建模分析水平,对保证航天器在轨安全运行和空间环境长期可持续利用至关重要。
基于对厘米级空间碎片国内外研究现状的分析,文章认为未来发展的重点方向在于以下两点:
(1)加强监测能力。既要提高传统地基设备的监测能力,使其可探测到厘米级空间碎片,同时也有拓展监测手段,实现天地基联合探测和多波段 (光学、微波、红外等)多技术手段的协同监测能力,综合利用现有和新建的各类监测设备进行厘米级空间碎片监测。
(2)提高建模分析水平。通过结合厘米级空间碎片监测成果,开展专项课题研究、国内外交流与合作、多学科跨领域协作等多种方式,促进对空间环境长期演化模型 (包括工程模型)的研究,实现对空间环境长期演化趋势更准确的分析与评估,并可据此制定相关规则或政策,以维护空间环境的长期可持续利用。